SG_POINT_Default={Name[]"SG1",GNumber 1,Thickness ....
与它相配合还要有相对应的USER用户程序组建,只要是标准用户程就行,不能和激光焊的标准组件混用。
KUKA在PLC中组态,注意KUKA的GSD文件的PN软件版本与KUKA设置的PN软件版本一致。

另外,与CP卡不同,集成的WEB服务器的CPU本身不提供任何的安全机制,那么如果需要防止非授权的访问....

可以使用该控制器作为PID固定设定值控制器或在多循环控制中作为层叠、混料或比率控制器。该控制器的功能....

SIMATIC ProDiag是用于机器和工厂诊断的完全集成的TIA解决方案。它节省了在工程阶段在C....

零点标定可通过确定轴的机械零点的方式进行。在此过程中轴将一直运动,直至达到机械零点为止。这种情况出现....
TSEND“ & „TRCV “ 发送和接收数据(TCP 和ISO - on- TCP)„T....

MOVIFIT的安全S11的控制原理电路图,安全电路控制逆变电路的控制电源,从而切断电机的电源。
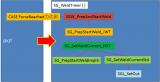
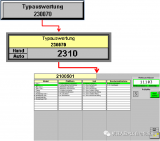
库数据块 DB529"DB_Typ_Var" 用作带有效车身型号的数据块的创建模板(与工厂有关)。....
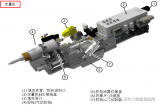
螺栓自动拧紧设备主要由螺栓拧紧设备,送料器,控制器,链接机构组成 。1.螺栓拧紧设备(将螺钉拧紧在工....

IFMIT_KL1_SPUELEN AND ((NOT $OUT[O_R_PFO] AND NOT ....

变量path里写入要存储的地址是“D: est” ,文件名是变量FID_strVisuText1_0....

GLOBALDEF SGM_MOVE_TO_FORCE (FORCE :IN, MovementTy....

$USER_SAF - 操作人员防护装置 / 防护门该输出端在打开护栏询问开关(运行方式 AUT)....

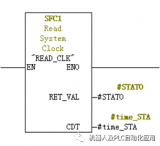
使用SFC1 "READ_CLK"读取时间,可以读取当前CPU系统时钟的日期和时间.
BASE坐标系: 可根据需要定义用户坐标系。 当机器人配备多个工作台时,选择用户坐标系可使操作更为简....
#RetValue_konfiguriert:= DeviceStates(LADDR :="Loc....
![最新-FB148[系统诊断]的新增点](https://file.elecfans.com/web1/M00/BE/D9/pIYBAF7jIceAM9_NAABbBSvt9oM194.png)
机器人发给PLC信号$IN_HOME、$EXT_AUTO、$ALAM_SOTP、$SUSER_SAF....

WHILE 循环是一种当型或者先判断型循环,这种循环会在执行循环的指令部分前先判断终止条件是否成立。
如果当前位置和参考位置之间的偏差太大,则调整参考失败。机器人以安全停止1停止,并且只能在操作模式T1....

TECH4 Prozessgeraet MS Steuerung=Nr1Brenner=Nr1 Te....

在 KRC4 中,DualNIC在设备管理器里面不是显示在【网络适配器】之下。该网卡不受 Windo....
P_Part=SGL_CALC_POS(TEACH_POS, ServoGun[SG_ActiveG....

通过 XML 文件配置以太网连接。针对每个连接,必须在机器人控制系统的目录 C:KRCROBOTER....
电机胶枪之所以需要校正工具是因为,电机转子的转头需要有一个和胶枪嘴的正确安装位置,所以需要校正工具来....
为了解锁MPS(使用或不使用docked工具),必须激活安全开关并设置“解锁MPS”信号。阀1和阀2....
两个通信伙伴都调用FB 65 "TCON"来设置和建立通信连接。在这些参数中,您要指定哪个伙伴是主动....

EtherCAT(以太网控制自动化技术)是一个开放架构,以以太网为基础的现场总线系统,其名称的CAT....

涂胶设备定量机电机采用增量式电机,每次断电重启后都要自动进行零点校正,也就是找到它上行程开光。


