 KUKA.Ethernet KRL 个人学习心得.
KUKA.Ethernet KRL 个人学习心得.

-----现在我竟然开始学习上了KUKA.Ethernet KRL.
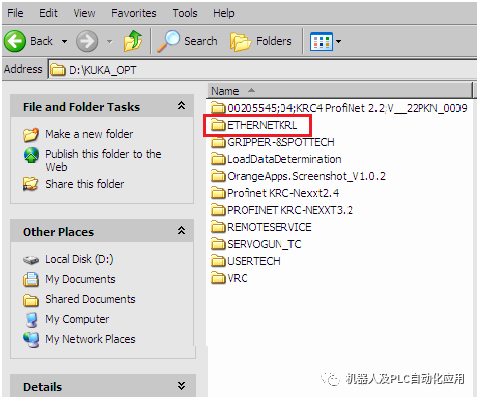
EhternetKRL是KUKA提供的一个以太网通信功能的软件包,支持TCP和UDP协议.首先是软件包的安装,软件包的安装有两种方式,一种是操作示教器安装(常用的方法),另一种是通过WorkVisual安装,通过示教器安装是常用的方法,这里只介绍这种方法,先将软件包复制到U盘里,如果是压缩包需要解压,路径不要有中文,中文会显示乱码,为了方便可以放根目录,如图:
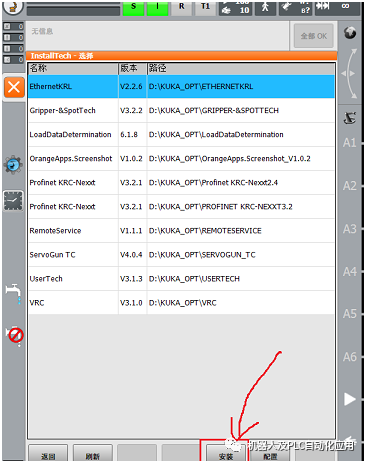
主菜单->投入运行->安装附加软件,有些版本也叫辅助软件

开始安装:KUKA.Ethernet KRL.
在通过以太网进行数据交换时,必须通过机器人控制系统的 KLI 建立一个网络连接。
如何编辑XML文件用来使用EthernetKRL激活:
通过 XML 文件配置以太网连接。针对每个连接,必须在机器人控制系统的目录 C:KRCROBOTERConfigUserCommonEthernetKRL 中定义一个配置文件。XML 文件都是 “ 区分大小写 ” 的。必须注意区分大小写。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
以太网
+关注
关注
41文章
6291浏览量
181923 -
KUKA
+关注
关注
3文章
218浏览量
17532
原文标题:KUKA.Ethernet KRL 个人学习心得.
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
ETHERNET IP转Modbus网关:变频器不装聋,张力稳,合格率97%
ETHERNET IP转Modbus网关:变频器不装聋,张力稳,合格率97% 事情是这样的:现场PLC用的是EtherNet/IP协议,但三菱变频器只认Modbus RTU。两边像说不同方言的两个人

厚声电阻RT0603FR-071KRL在信号调理电路中的应用
RT0603FR-071KRL并非厚声电阻的标准型号,若以国巨同规格电阻(如RC0603FR-071KL)为参考,其在信号调理电路中可承担阻抗匹配、分压偏置、滤波、限流保护等基础功能,但需结合具体电路需求验证参数适用性。

工业现场CClink转EtherNET网关配置KUKA机器人到三菱PLC
工业现场客户使用的控制端设备是三菱PLC的CCLINK协议,但是现场的设备端均为EtherNET协议的设备,如果需要保证通讯成功就需要对两种协议进行转换,现场采用小疆GW-EIPZ-CCIEC型
如何用EtherNet/IP网关实现Superisys RFID与施耐德PLC的无缝通讯?
摘要 : EtherNet/IP作为工业自动化领域的“通用语言”,近年来在Profinet、EtherCAT的夹击下为何能逆势增长?本文将以Superisys RFID与施耐德M241 PLC的通讯
Profinet转EtherNet/IP协议转换网关:实现汽车产线通讯壁垒突破
一、项目背景与核心痛点 某新能源汽车焊装车间承担整车白车身焊接任务,产线包含32台KUKA焊接机器人(Profinet协议)、16台Festo阀岛(Profinet)及8台AB罗克韦尔
DeviceNet转EtherNet/IP赋能罗克韦尔PLC与库卡机器人在汽车零部件焊接多工位协同调度
DeviceNet 转 EtherNet/IP在汽车制造行业,生产线上自动化程度极高,不同设备间的高效通信至关重要。某汽车制造企业在车身焊接环节,采用了基于 EtherNet/IP 主站的罗克韦尔
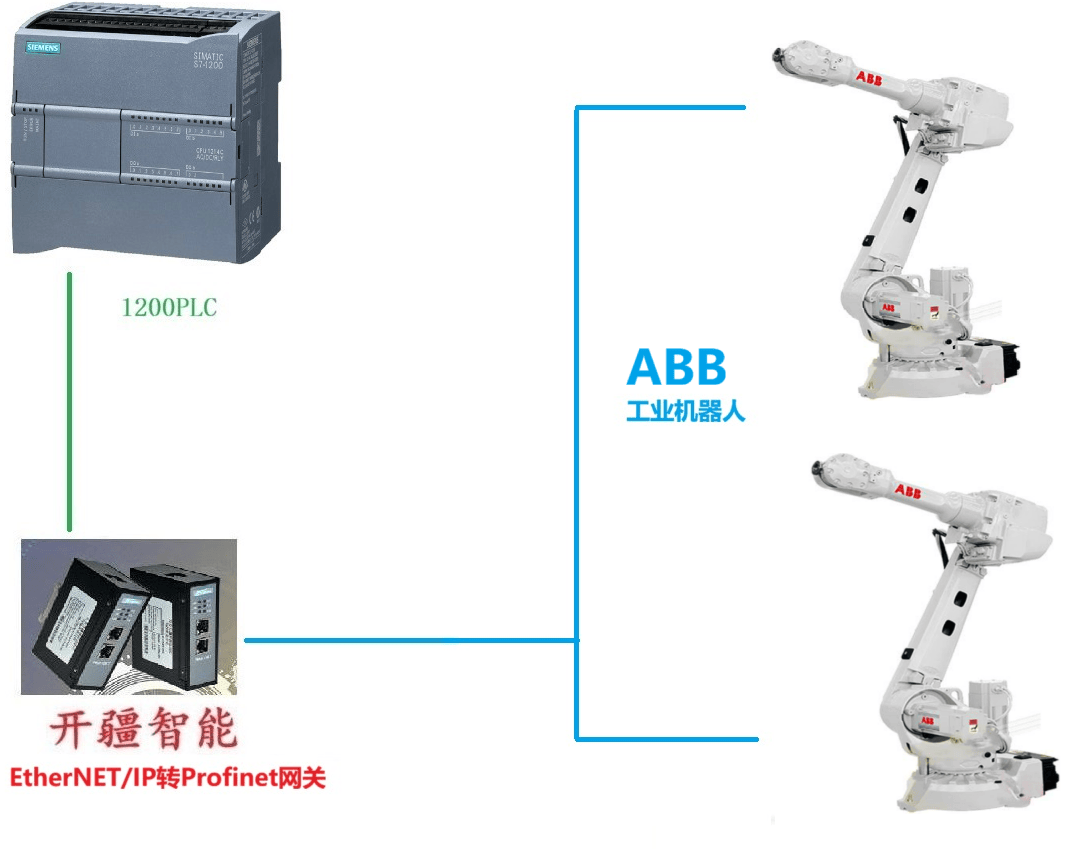
开疆智能Profinet转ethernet网关连接ABB机器人主站配置案例
本案例是ABB机器人作为Ethernet/IP主站连接作为Ethernet从站的网关,并由网关将数据转换成Profinet协议并被西门子PLC读写。
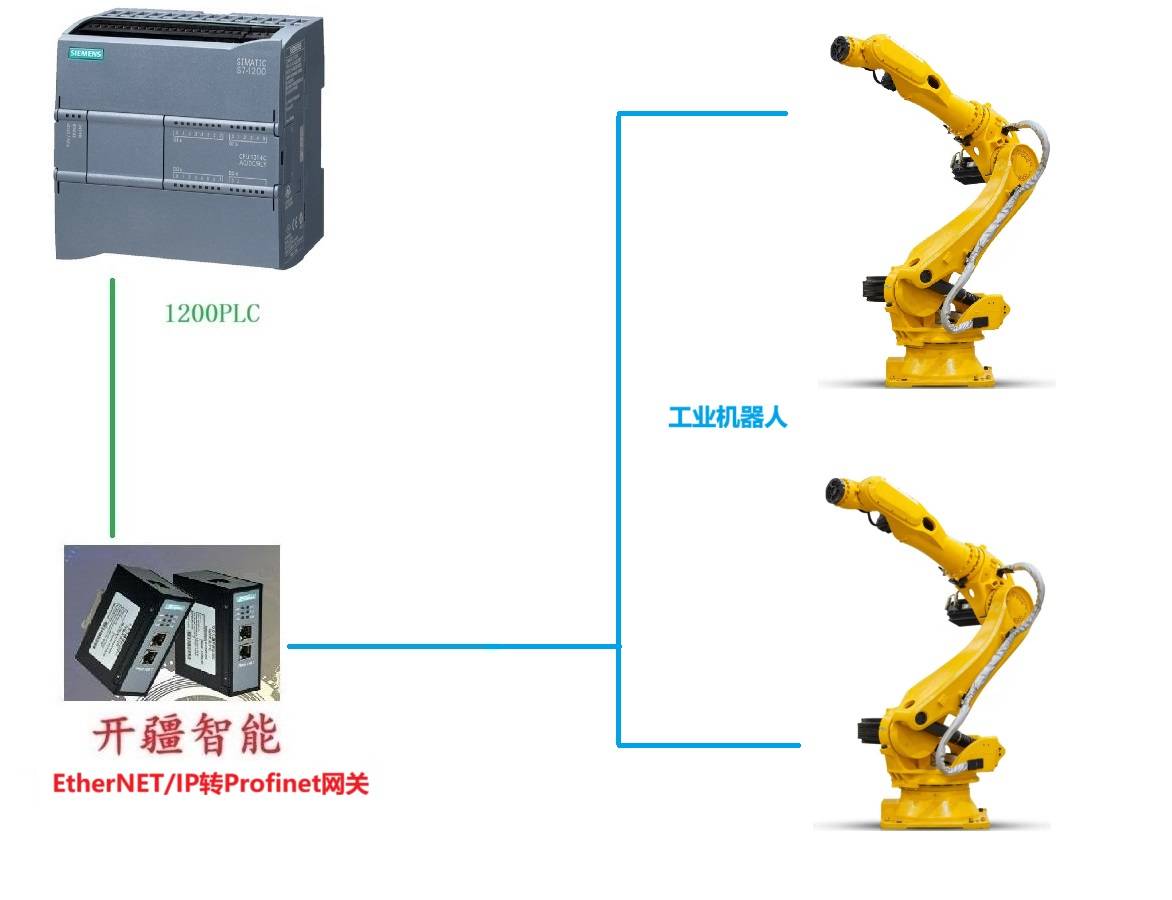
开疆智能Profinet转EtherNET/IP网关连接机器人配置案例
本案例是通过网关将EtherNET通讯协议的机器人接入到西门子Profinet网络之中,以便于PLC可以对机器人可以进行读写控制。 配置过程: 设置机器人 Ethernet IP 通讯从站
别再为通信发愁!机床厂PROFIBUS DP转EtherNet/IP网关应用指南,低成本实现智能升级
、KUKA)则普遍支持EtherNet/IP协议。在这类异构网络共存的环境中,协议转换网关成为打通数据壁垒的核心枢纽。 网关的核心作用与工作流程 角色定位:网关作为“翻译官”,部署在西门子PLC
Modbus转EtherNET IP网关开启节能改造新范式
在现代工业生产和能源管理中,无锡耐特森Modbus转EtherNET IP网关MCN-EN3001发挥着至关重要的作用。通过将传统的串行通信协议Modbus转换为基于以太网的EtherNET IP
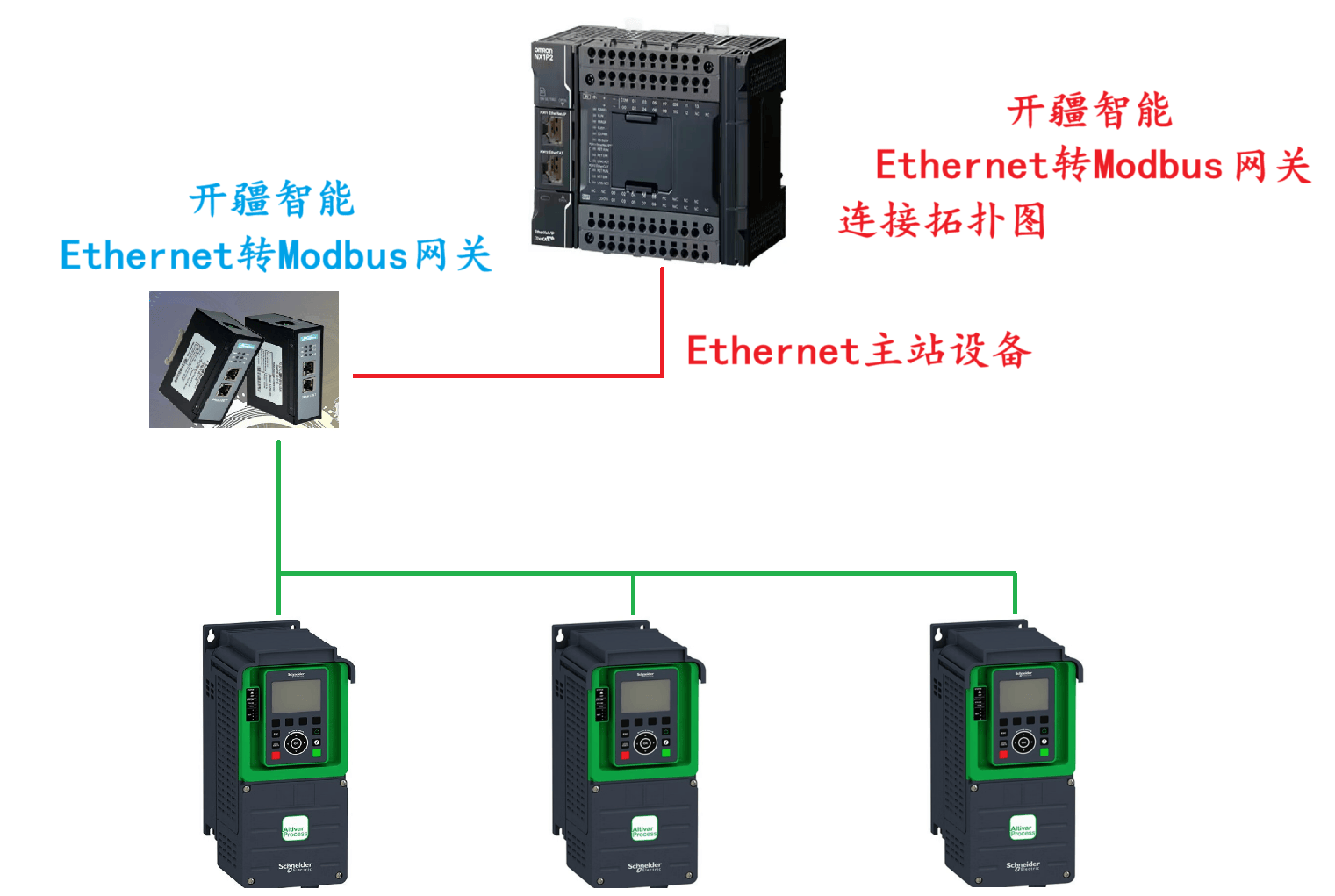
开疆智能Ethernet/IP转Modbus网关连接变频器配置案例
本案例是通过开疆智能Ethernet转modbus网关连接变频器的配置案例。 由于客户现场改造PLC换成欧姆龙系列,所以使用开疆智能研发的Ethernet转Modbus网关进行通讯转换。 配置方法
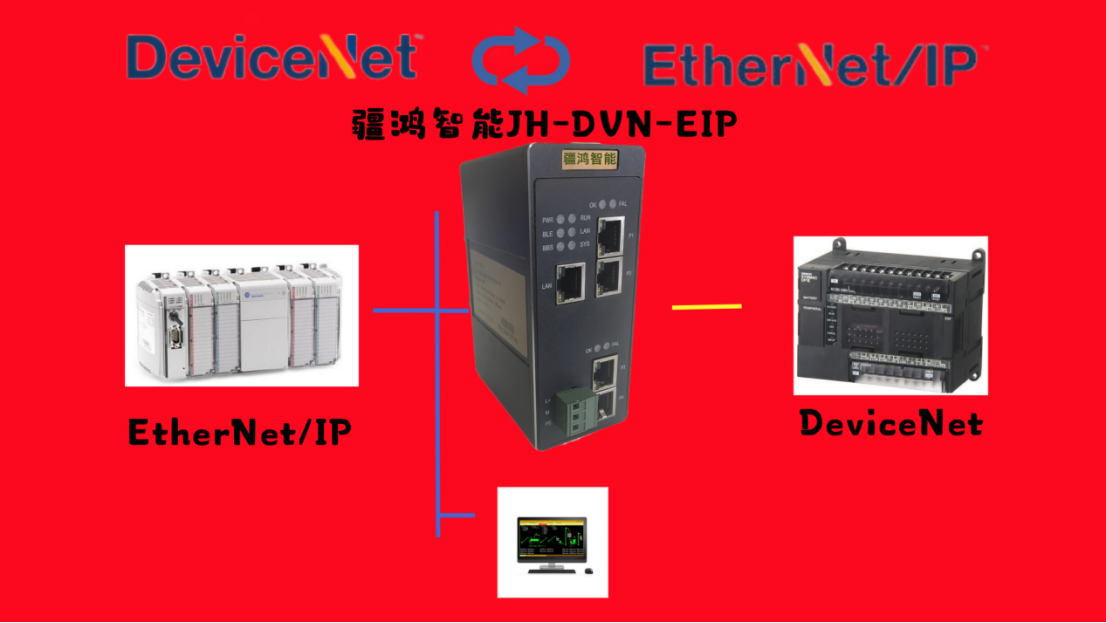
EtherNet/IP转DeviceNet协议网关详解
一,设备主要功能 疆鸿智能JH-DVN-EIP本产品是自主研发的一款EtherNet/IP从站功能的通讯网关。该产品主要功能是连接DeviceNet总线和EtherNet/IP网络,本网关



评论