 KUKA机器人之PFO飞行焊控制
KUKA机器人之PFO飞行焊控制


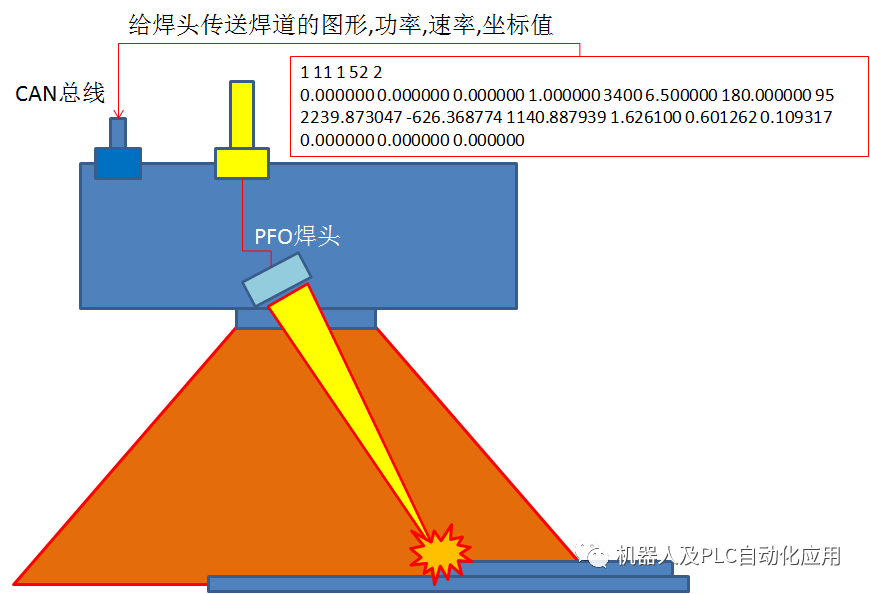
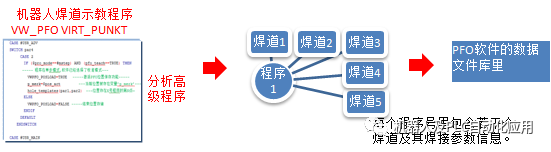
1.机器人在执行焊道位置示教程序时,当机器人运行到焊道轨迹点时,通过KUKA用户程序记录焊道的程序号,焊点号,焊道图形属性和坐标值,然后存到PFO应用软件数据库里。
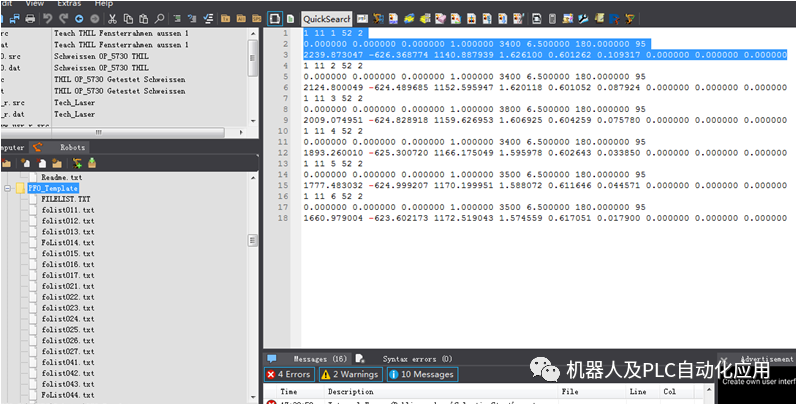


使用软件用来微调:

还有其他的焊道的模式用来校准
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
31494浏览量
223789 -
KUKA
+关注
关注
3文章
218浏览量
17516
原文标题:KUKA机器人之PFO飞行焊控制
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
基于米尔RK3576核心板的国产割草机器人解决方案
。
国产算法兼容 :支持与国内SLAM方案商(如科沃斯、追觅等生态伙伴)的算法快速适配,缩短产品落地周期。
3. 执行层:实时控制与丰富接口
割草机器人的底盘运动控制需要极低且确定性的延迟。RK3576
发表于 04-24 17:31
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
“盲动”变成“感知运动”
普通机器人靠编码器控制位置,只能“按死命令走”。而关节扭矩传感器实时测量每个关节受到的扭转力,精度可达0.01牛米,采样频率高达1000赫兹(每秒反馈1000次)。这相当于
发表于 04-17 17:27
EtherNet/IP转CANopen——焊装产线的“协议破壁人”:让机器人听懂焊机
EtherNet/IP转CANopen——焊装产线的“协议破壁人”:让机器人听懂焊机 在汽车焊装车间,焊机与机器人“各说各话”——焊机标配E

人形机器人爆发背后,一个被忽视的核心技术:机器人运动学控制
,有一个关键问题常常被忽略:机器人如何精准地“动起来”?这背后的核心技术就是机器人运动学(RobotKinematics)控制。在机器人系统中,运动学用于描

再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
科技:《武 BOT》:H2人形机器人31个高精度关节、单臂7自由度,完成醉拳、双截棍、舞剑,同步误差**< 0.1秒;核心是高功率密度伺服电机+高速控制+**强散热。
**魔法原子:《智造
发表于 02-17 14:07
高精度机器人控制的核心——基于 MYD-LT536 开发板的精密运动控制方案
一、背景:机器人迈向“微米级控制时代”
随着智能制造和自动化产业的持续升级,工业机器人不再仅仅承担重复搬运,而是被要求在装配、检测、精密加工等高精度场景中完成微米级控制任务。
在这些“
发表于 11-14 15:48
EtherCAT转PROFINET网关:助力KUKA机器人实现“焊”装自由!
EtherCAT转PROFINET网关:助力KUKA机器人实现“焊”装自由! 在追求极致效率与精度的现代汽车焊装车间,实现车身总拼、地板总成、四门两盖等核心工序的100%自动化,已成为
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
时人脸识别、物体检测与跟踪等。同时,在高负载下,芯片温度稳定在65℃左右,证明了其优异的高能效比和低发热特性,非常适合对功耗和散热敏感的机器人产品。
为什么RK3576是机器人开发的理想之选
发表于 10-29 16:41
小萝卜机器人的故事
经过我的申请,
马老师发放了,
小萝卜机器人的,
开发权限,
原来的小萝卜公司,
因为经营不善倒闭,
作为科研产品,
几个技术对此惋惜,
自掏腰包,
要让小萝卜机器人,
再生,
每次听到小萝卜说
发表于 10-23 05:24
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
2025 世界人形机器人运动会于 8 月 17 日圆满收官,赛场上机器人在跑步、跳跃、抓取等项目中的精彩表现,背后是运动控制、环境感知等技术的迭代升级。而在这些技术中,磁传感器芯片凭借独特优势,成为
发表于 08-26 10:02

工业机器人的特点
0.3%的年化生产力提升。因此,发展工业机器人推动国内自动化水平,提高产出是目前的不二之选。
** 适用范围广**
机器人相对于工人的优势还体现在应用范围广。机器人可以运用在危险、恶劣
发表于 07-26 11:22
当机器人遇上“语言障碍”:CCLINKIE转Profinet的“破冰外挂”来啦\\!
在汽车焊装车间的技术角,工程师小陈的笔记本记满了“跨协议难题”:当搭载Profinet的库卡机器人遇上CCLINKIE总线的三菱PLC,数据交互像隔着玻璃喊话——PLC发送的坐标指令要“绕地球半圈
发表于 06-04 14:31
盘点#机器人开发平台
地瓜机器人RDK X5开发套件地瓜机器人RDK X5开发套件产品介绍 旭日5芯片10TOPs算力-电子发烧友网机器人开发套件 Kria KR260机器人开发套件 Kria KR260-
发表于 05-13 15:02
详细介绍机场智能指路机器人的工作原理
带)定位、Wi - Fi 定位等。蓝牙定位可以通过与机场内部署的蓝牙信标进行通信,获取机器人的大致位置信息。UWB 定位则利用超宽带信号实现更精确的定位,能够在复杂的室内环境中达到较高的定位精度,误差可控制
发表于 05-10 18:26



评论