 KUKA电伺服焊钳测量原理分析
KUKA电伺服焊钳测量原理分析

user测量程序:
Geometrie:
初始化
在以下情况下必须完成:
•启动时
•每次更换电极后
使用在WorkVisual下的初始化力新上限下配置的力。
nachFraesen:
循环初始化
•循环初始化必须在瓶盖铣削之后进行,使用在WorkVisual中在初始化力盖下配置的力。

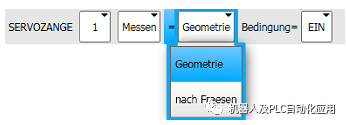
焊钳测量USER程序:
P1 =选择钳子(钳子编号)
P2 =技术选择(测量)
P3 =方法-几何/铣削后
P4 =条件-执行命令的条件
例如:
SERVOZANGE 1 Messen= nach Fraesen Bedingung=EIN 测量
VW_SGB_INIT_ADV(TRUE,#SG_PTP,P8,1,#SAME)
VW_SGB_INIT_MAIN(TRUE,#SG_PTP,P8,1,#SAME)
VW_SGB_INIT_MAIN(Condition:IN, MovementType :IN, PointCoord :IN,GunNumber :IN,InitType :IN)
Condition:TRUE条件
MovementType:SG_PTP运动类型
PointCoord:P8 工作点号
GunNumber:1 枪号
InitType: #SAME/#NEW 测量类型:#SAME铣削后测量,#NEW更换电极测量

1.SGL_CalcWear 测量损耗
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
伺服
+关注
关注
17文章
707浏览量
43562 -
测量
+关注
关注
10文章
5737浏览量
117012 -
KUKA
+关注
关注
3文章
218浏览量
17522
原文标题:KUKA电伺服焊钳测量原理分析
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
TH2851阻抗分析仪测量薄膜材料介电常数的阻抗分析方法
在现代电子材料研发与质量控制中,介电常数是评估绝缘材料电学性能的关键参数之一,尤其对于薄膜材料如PDMS、丝素蛋白膜及其复合膜,其介电特性的精准测量直接影响器件的设计与稳定性。同惠TH2851

电运输测量
2端法和4端法测量配置。对样品施加电、光或热等激励,并将激励转换为电压 (V) 或电流 (I) 信号。这些测量通常在具有显着背景噪声的低频下进行。 测量方法的选择取决于样品的阻抗和

流场可视化视角下的能耗溯源:电液伺服作动器内部能量损失机理研究
电液伺服作动器作为高端装备的核心执行元件,其性能直接决定了航空航天、重型机械、精密制造等领域的控制精度与响应速度。近年来,随着机载功率电传一体化技术的突破,电液伺服作动器正朝着“阀缸集

对于伺服行星减速机的轴承失效的原因分析
伺服行星减速机作为精密传动设备的核心部件,其轴承的可靠性直接影响整机寿命与性能。然而在实际应用中,轴承失效问题频发,轻则导致设备振动噪声增大,重则引发传动系统崩溃。本文将系统分析轴承失效的六大主因,并结合工程实践提出针对性解决方案。
伺服电机和伺服减速机如何配选的
伺服电机与伺服减速机的配选是工业自动化领域中的关键技术环节,直接影响设备的精度、效率和使用寿命。正确的配选需要综合考虑负载特性、运动参数、安装空间以及成本等因素。以下从工作原理、选型步骤、常见误区及实际应用四个方面展开详细分析。
伺服定位跑偏分析及解决方法
伺服系统在工业自动化领域扮演着核心角色,其定位精度直接影响生产效率和产品质量。然而在实际运行中,伺服定位跑偏问题频发,成为困扰工程师的技术难题。本文将系统分析跑偏成因,并结合实际案例提出针对性解决方案,为设备维护和系统优化提供参
阻抗分析仪测量小阻抗的技巧
在现代电子工程中,对小阻抗(如毫欧级甚至微欧级)的精确测量是确保电源完整性、功率传输效率及高频电路性能的关键。使用阻抗分析仪测量小阻抗时,微小的误差源都可能显著影响结果,因此必须采取系统化的优化策略。以下是提升小阻抗
电液伺服作动器为何标配磁致伸缩位移传感器
电液伺服作动器标配磁致伸缩位移传感器,以实现高精度闭环控制,具备非接触、绝对位置反馈、抗干扰及耐恶劣环境等特性。
电液伺服系统构造解析:从力矩马达到液压执行机构的精密控制链
电液伺服系统是现代工业控制领域的一项关键技术,它将电子控制的灵活性与液压系统的高功率密度完美结合,形成了一种响应速度快、控制精度高的闭环控制系统。这类系统由电信号处理装置和液压动力机构组成,通过反馈


MT6825磁编芯片为伺服电机控制系统带来全角度测量能力
在工业自动化、机器人技术以及新能源汽车等众多领域,伺服电机控制系统都扮演着至关重要的角色。而测量电机的旋转角度,对于实现精确的运动控制起着决定性作用。今天,我们就来深入探讨一下MT6825磁编芯片如何为伺服电机控制系统带来全角度
MT6825磁编芯片:为伺服电机控制系统注入全角度测量新活力
在当今工业自动化飞速发展的时代,伺服电机控制系统作为众多设备的核心动力源,其性能的优劣直接影响着整个工业生产的效率和质量。而磁编芯片作为伺服电机控制系统中的关键组件,对于实现精确的角度测量和控制起着
是德频谱分析仪对微波信号频率稳定性的测量与分析
微波信号频率稳定性在现代通信、雷达、电子对抗等领域至关重要。是德频谱分析仪作为高精度的测量设备,能够对微波信号的频率稳定性进行准确测量与深入分析。以下是相关探讨。

机床伺服电机的选型方法分析
纯分享帖,需要者可点击附件免费获取完整资料~~~*附件:机床伺服电机的选型方法分析.pdf【免责声明】本文系网络转载,版权归原作者所有。本文所用视频、图片、文字如涉及作品版权问题,请第一时间告知,删除内容!
发表于 05-29 14:13
时间间隔测量分析仪特点总结
在时间频率行业,时间间隔测量是不可缺少的一部分,选择一款合适的时间间隔测量仪就会显得尤为重要,今天我们来分析一下时间间隔分析仪的特点。 关键词:时间间隔



评论