 VASS05机器人2.20系统ProConOS_IO接口解析
VASS05机器人2.20系统ProConOS_IO接口解析

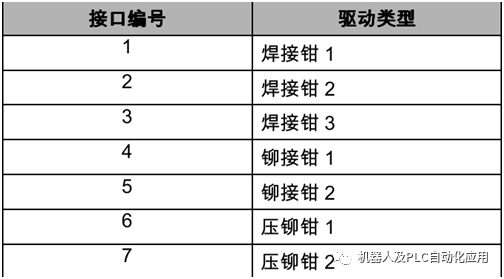
生成文件使用的接口:
接口1
接口2
接口3
接口4
接口5
接口6
接口7
2.选择激活ProConOS_IO,激活软件后开始进行寻找设备IO激活外部轴E1.
IO区域 焊钳1从705开始 焊钳2从865开始, 焊钳3从1025开始.
铆钳1 从1185开始, 铆钳2 从1265 开始. 压铆钳1从 1345开始
压铆钳2 从1425开始.
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
30631浏览量
219748 -
接口
+关注
关注
33文章
9451浏览量
156201
原文标题:VASS05机器人2.20系统ProConOS_IO接口解析
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
探索RISC-V在机器人领域的潜力
应用,特别是机器人操作系统领域的可行性。MUSE Pi Pro以其强大的K1 AI CPU和官方对主流开源软件栈的积极适配,成为了一个非常有吸引力的选择。
二、 硬件初窥:性能小钢炮
MUSE Pi Pro
发表于 12-03 14:40
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
。· 利用开发板上的MIPI CSI1和CSI2接口,完整接入8路摄像头,实现了所有通道的视频预览与采集,为机器人构建了全方位的视觉感知系统。卓越性能表现:· CPU占用率:34%· DDR占用率:50
发表于 10-29 16:41
小萝卜机器人的故事
代替,
LED,
有大佬感兴趣,
一起关注和讨论代码,
这个机器人知名度不高,
可是是机器人的原型,
如果开放接口,
定位和无线充电,
也不失为未来的礼物。
让我们为小萝卜工程师的,
自掏腰包救萝卜
发表于 10-23 05:24
工业机器人的特点
的基础,也是三者的实现终端,智能制造装备产业包括高档数控机床、工业机器人、自动化成套生产线、精密仪器仪表、智能传感器、汽车自动化焊接线、柔性自动化生产线、智能农机、3D 打印机等领域。而智能制造装备中工业
发表于 07-26 11:22
明远智睿SSD2351开发板:语音机器人领域的变革力量
连续的长句语音识别,还是复杂口音的处理,都能快速响应,保证语音机器人与用户之间流畅的对话体验。 其丰富的接口为语音机器人的功能拓展提供了可能。USB接口可以连接高灵敏度的麦克风阵列,实
发表于 05-28 11:36
盘点#机器人开发平台
地瓜机器人RDK X5开发套件地瓜机器人RDK X5开发套件产品介绍 旭日5芯片10TOPs算力-电子发烧友网机器人开发套件 Kria KR260机器人开发套件 Kria KR260-
发表于 05-13 15:02
【「# ROS 2智能机器人开发实践」阅读体验】机器人入门的引路书
ROS的全称:Robot Operating System 机器人操作系统
ROS的 目的 :ROS支持通用库,是通信总线,协调多个传感器
为了解决机器人里各厂商模块不通用的问题,让机器人
发表于 04-30 01:05
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
具身智能机器人的基础模块,这个是本书的第二部分内容,主要分为四个部分:机器人计算系统,自主机器人的感知系统,自主
发表于 01-04 19:22
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
,能够利用\"思维链\"的技术将复杂任务分解为多个子任务,以渐进的方式解决问题。这不仅提高了任务的成功率,也显著增强了系统的鲁棒性,使得机器人可以更高效地应对复杂环境和多样化需求
发表于 12-29 23:04
【「具身智能机器人系统」阅读体验】1.初步理解具身智能
感谢
感谢电子发烧友网社区给予《具身智能机器人系统》试读机会。在这知识的盛宴中,我感受到社区的关怀与支持。定不负期望,认真研读,分享所学,回馈社区。
一、本书大纲
《具身智能机器人系统
发表于 12-28 21:12
【「具身智能机器人系统」阅读体验】1.全书概览与第一章学习
了解具身智能机器人相关的知识,我感到十分荣幸和幸运。
全书简介
本书以循序渐进的方式展开,通过对具身智能机器人技术的全方位解析,帮助读者系统化地学习这一领域的核心知识。
首先在第一部
发表于 12-27 14:50
【「具身智能机器人系统」阅读体验】+数据在具身人工智能中的价值
提供了对机器人环境和动作的统一和详细的理解。只有在这些过程之后,数据才能有效地用于训练 EAI 系统。
目前,应用 Sim2Real 技术的主要障碍是“现实差距”,即模拟环境与现实世界之间的差异,包括物理
发表于 12-24 00:33
【「具身智能机器人系统」阅读体验】+初品的体验
《具身智能机器人系统》 一书由甘一鸣、俞波、万梓燊、刘少山老师共同编写,其封面如图1所示。
本书共由5部分组成,其结构和内容如图2所示。
该书可作为高校和科研机构的教材,为学生和研究人员提供系统
发表于 12-20 19:17
《具身智能机器人系统》第1-6章阅读心得之具身智能机器人系统背景知识与基础模块
、谷歌的RT系列等前沿产品中展露锋芒。这些突破性成果标志着AI正从虚拟世界迈向物理世界的深度交互。
而研读《具身智能机器人系统》前六章,我对具身智能(Embodied Artificial
发表于 12-19 22:26





 工商网监
工商网监
评论