 RTX 5880 Ada 驱动51Sim实现端到端仿真与数据合成新飞跃
RTX 5880 Ada 驱动51Sim实现端到端仿真与数据合成新飞跃

在自动驾驶与智能驾驶技术蓬勃发展的当下,仿真测试成为了推动其进步的关键环节。自动驾驶仿真平台能够在虚拟环境中模拟各种真实场景,对自动驾驶系统进行全面测试,从而大幅降低实际道路测试的成本与风险。
51Sim 由 51WORLD 于 2017 年孵化,是国内领先的 AI 合成数据及仿真平台公司,在智能驾驶仿真和数据闭环领域有着卓越的产品竞争力和商业化能力。现核心产品包括智能驾驶与机器人仿真平台 SimOne、数据闭环与合成数据平台 DataOne、交通信息模型平台 TIM。
SimOne 是 51Sim 于 2017 年研发推出的具有自主知识产权的智能驾驶与机器人仿真平台,集静态和动态数据导入、测试场景编辑、传感器仿真、动力学仿真、回放仿真、虚拟数据集生成、在环测试等于一体,具备全链闭环仿真能力。
来自行业的 KPI
1
目前,自动驾驶仿真软件测试遵循一系列行业标准。
功能测试需遵循 ISO 26262 中自动驾驶功能安全要求,仿真软件要精准模拟摄像头图像采集、雷达距离探测等各类传感器数据,以此验证自动驾驶算法在不同场景下的功能完整性。依据 SAE J3016 对自动驾驶等级的划分,仿真软件还应覆盖 L0 到 L5 各等级所需场景,像城市道路复杂路况、高速自动驾驶场景以及极端天气特殊场景等。
性能测试方面,帧率稳定性、数据输出准确性和延迟时间等指标要求严格。在实时性上,常见自动驾驶场景模拟中帧率通常需稳定在一定数值以上(如 30FPS),确保模拟连贯真实。数据输出精度要满足自动驾驶系统环境感知需求,保证传感器数据模拟误差处于可接受范围。
求真之旅无法绕行的高山
2
物理级精确的仿真场景
为了提升仿真置信度,51Sim 需要保证 SimOne 平台虚拟场景渲染的精确度,能够精确模拟真实的自动驾驶场景。同时,还需要模拟物理规律、车辆与周围环境物体之间的交互以及准确模拟空间位置关系,确保各个物体在虚拟场景中的位置和姿态符合实际情况,也是渲染过程中的关键难点。
多传感器的仿真
对于向高阶智驾(L2+)发展的自动驾驶仿真系统来说,传感器的数量和种类也在显著增加。除了基本的虚拟场景渲染,SimOne 平台还需要支持多路不同摄像机的仿真,这进一步增加了系统的复杂性和 GPU 渲染性能要求。特别是对于性能要求更高的鱼眼镜头,其超广角的视野和特殊的成像特性对渲染系统提出了更高的挑战,带来了更大的数据量和更复杂的图像处理需求,如何在保证图像质量的同时,又不降低系统的运行效率,是需要解决的关键问题。
仿真数据的同步性
同一场景内不同摄像机之间的协同工作、数据同步等问题都需要被妥善解决。为了确保测试结果的准确性和可靠性,不同摄像机渲染出的数据必须保持高度的同步性。任何一丝的同步误差都可能导致测试结果的偏差,因此对同步性的要求极为严格。
合成数据数量与稳定性
训练自动驾驶算法需要海量的数据,才能让 AI 模型充分学习到各种场景下正确决策方式。然而,真实路采的数据大多都是无效数据,对于特定的场景训练则需要海量的合成数据。对于仿真使用的合成数据,数量和数据生成的稳定性都有着极高的要求。在长时间、高强度的合成数据生成过程中,系统的稳定性和可靠性至关重要,GPU 和驱动的故障以及温度失控都会导致性能下降,将严重影响整个开发进度。
加速端到端仿真系统的实践落地
3
赋能实时多传感器仿真
在自动驾驶领域,硬件在环(HIL)测试是自动驾驶方案的关键环节。HIL 测试的一大特点就是对仿真有实时性要求,它通过实时模拟真实驾驶环境中的各种场景和条件,对自动驾驶系统的硬件和软件进行测试和验证。摄像头仿真产生的图像序列,既可以直接软件的方式接入自动驾驶感知系统,也可以通过视频注入的方式,或者是黑箱的方式进行 HIL 测试。
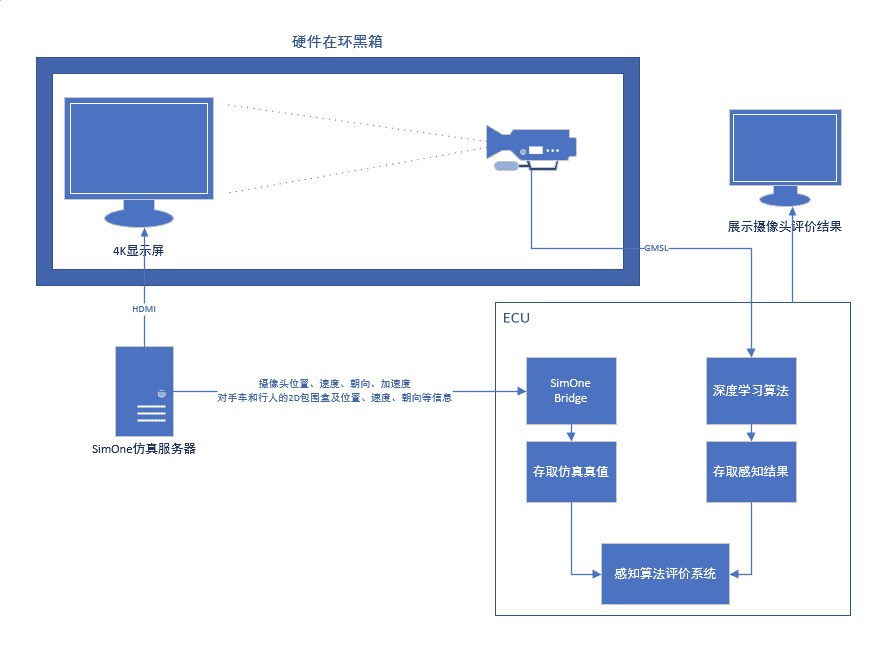
▲ SimOne HIL 摄像头在环黑箱检测评价系统的架构示意图
2025 51Sim
此图片由 51Sim 提供,如果您有任何疑问或需要使用此图片,请联系 51Sim(下同)
SimOne 摄像头在环黑箱检测评价系统中,黑箱内的专业显示屏受 SimOne 仿真控制器控制,主要负责运行 SimOne 仿真驾驶场景。在多路摄像的 HIL 测试中,借助由丽台科技提供的基于 NVIDIA RTX 5880 Ada 多 GPU 仿真方案,SimOne 仿真控制器可以对多路摄像头视频进行实时渲染,每个 GPU 渲染其负载能力范围内一定数量的摄像头,以保证能够输出稳定帧率的视频信号。
RTX 5880 Ada 具备 48GB GDDR6 显存以及 14,080 个 CUDA 核心,通过将复杂的图形计算任务分配到多个计算核心上并行处理,大大提高了数据处理速度。针对自动驾驶场景中的动态物体渲染,GPU 能够快速计算物体的运动轨迹和光影变化,确保在高负载情况下也能保持较高的帧率。在 51Sim 的 SimOne HIL 方案中,对于三车道路口、无其他车辆的仿真场景(如下图所示),单卡 RTX 5880 Ada GPU 可以支持虚拟场景 3 路 4K 或者 1 路鱼眼摄像头稳定的 30FPS 输出。
同时,借助 NVIDIA Quadro SyncⅡ 同步卡可以保障帧同步输入,从而保持多路信号的渲染场景的一致性。这种方案不仅能够满足多路摄像机和鱼眼镜头的支持需求,还能确保渲染数据的同步性,为 HIL 测试提供了可靠的保障。
具体来说,在 51Sim 的 SimOne HIL 方案中,多工作站集群下使用 6-8 张 RTX 5880 Ada 显卡可以支持多达 11 路摄像头(当前中高端车型的主流配置)注入,基本能覆盖现有的仿真需求,大大提升了系统的扩展性和灵活性,能够根据不同的测试需求进行配置。
加速多传感器数据合成
基础的模型训练需要大量的合成数据,生产合成数据的一种方式是仿真场景的渲染。RTX 5880 Ada GPU 凭借其大显存的优势,虚拟场景中能够在增加 4K 渲染路数的同时,显著提升视频渲染生成的效率,保证渲染质量。
在如上图所示的综合城区、有稀疏交通流的仿真场景下,合成输出 60 秒、帧率为 30FPS、码率为 32768 的视频,单张 RTX 5880 Ada 进行 3 路 4K 的渲染输出时,能调用 33.7GB GPU 内存,最终渲染效率为 14.28(渲染效率 = 摄像头数量 × 视频帧率 × 视频时长 / 渲染时间)。而 4 路 4K 渲染输出可以调用 42.3GB GPU 内存,效率则提升至 15.13。RTX 5880 Ada GPU 显存为 48GB,因此可以同时支持更多的摄像头高效渲染。
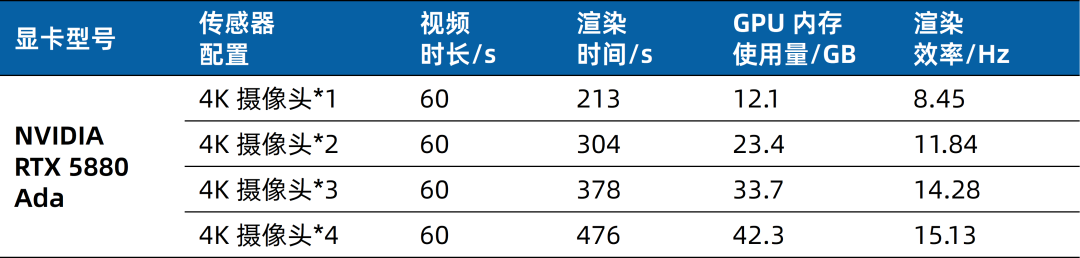
RTX 5880 Ada GPU 在处理大量渲染任务时,不仅能够支持更多的合成数据并行渲染,还能在长时间、高强度的工作状态下,提供出色的可靠性和稳定性,确保了合成数据的质量和数量,为 SimOne 自动驾驶算法的训练提供了坚实的基础。
为了提高数据的有效性,提高场景生成的效率,51Sim 也在探索 AI 生成合成数据的方案,即使用视频生成模型,输入动静态结构化场景,输出多视角一致的摄像头合成数据。不同的摄像头或传感器配置会产生不同分辨率和帧率的视频数据,数据量巨大。也同样需要 RTX 5880 Ada 强大算力以及稳定性的支持。
51Sim CEO
“当然这个合成数据的集群是要全自动化全天候运行的,所以对显卡的负载是非常大的。显卡在这上面 24 小时在运行数据,所以这块我们也采用了专业卡的方案。随着合成数据需求的增加,这个故事可能刚开始。”
*与NVIDIA产品相关的图片或视频(完整或部分)的版权均归NVIDIA Corporation所有。
-
数据
+关注
关注
8文章
7366浏览量
95180 -
仿真
+关注
关注
55文章
4571浏览量
138843 -
自动驾驶
+关注
关注
795文章
15065浏览量
182035
原文标题:案例分享丨智驾护航,RTX 5880 Ada 助力 51Sim 完成端到端仿真与数据合成实践
文章出处:【微信号:Leadtek,微信公众号:丽台科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
INT技术之IPT:实现端到端网络路径质量的精准监控

解锁端到端仿真新可能 :全新 aiSim 6 即将发布

端到端自动驾驶仿真新范式:aiSim如何解决智驾测试的"灾难性挑战"

如何训练好自动驾驶端到端模型?

端到端智驾模拟软件推荐:为什么aiSim是业界领先的自动驾驶模拟平台?
Nullmax端到端轨迹规划论文入选AAAI 2026
自动驾驶中端到端仿真与基于规则的仿真有什么区别?
自动驾驶中“一段式端到端”和“二段式端到端”有什么区别?

NVIDIA Isaac Sim仿真平台助力他山科技实现触觉传感技术突破
NVIDIA助力构建人形机器人全身遥操作仿真平台
为什么自动驾驶端到端大模型有黑盒特性?




评论