 Nullmax端到端轨迹规划论文入选AAAI 2026
Nullmax端到端轨迹规划论文入选AAAI 2026

11月8日,全球人工智能顶会 AAAI 2026 公布论文录用结果,Nullmax 研发团队的端到端轨迹规划论文成功入选。该论文创新提出一种由粗到精的轨迹预测框架——DiffRefiner,能够实现更为灵活、精准的轨迹预测。
AAAI (Association for the Advancement of Artificial Intelligence) 是人工智能领域最具影响力、历史最悠久的顶级学术会议之一。该会议素以评审严格、竞争激烈著称。此次 AAAI 2026 共吸引了全球范围内超过2.3万篇论文投稿,投稿量创历史新高,而最终录用率仅为17.6%。
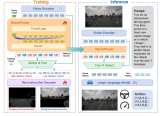
本次入选论文题为《DiffRefiner: Coarse to Fine Trajectory Planning via Diffusion Refinement with Semantic Interaction for End to End Autonomous Driving》,创新提出一种由粗到精轨迹预测框架——DiffRefiner。通过在生成式推理过程中融入判别式的轨迹粗解模块,粗轨迹为生成式去噪提供了强有力的先验与引导。同时进一步地设计了细粒度去噪解码器,以增强场景约束的作用,使预测轨迹能更好地关注周围的驾驶环境,从而提升精度。
本次论文的入选,标志着Nullmax研发团队成果在相继入选CVPR、ICCV、ECCV、WACV、ICRA、IROS等全球顶级会议及期刊后,进一步实现了在智能驾驶端到端领域的持续深耕。
此项成果不仅体现了Nullmax在端到端技术领域的前沿研发实力,也为打造领先、优质的智驾产品积累了全链条技术优势。后续,Nullmax将推出关于该技术成果的详尽解读,敬请关注!
-
人工智能
+关注
关注
1820文章
50330浏览量
266967 -
智能驾驶
+关注
关注
5文章
3043浏览量
51379
原文标题:AAAI 2026公布!Nullmax端到端轨迹规划论文入选
文章出处:【微信号:Nullmax,微信公众号:Nullmax纽劢】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录

Nullmax研发团队静态元素检测和拓扑推理新成果入选CVPR 2026
自动驾驶端到端为什么会出现黑盒现象?

后摩智能4篇论文入选人工智能顶会ICLR 2026
Nullmax DiffRefiner轨迹预测框架入选AAAI 2026

Nullmax在CES 2026展示基于瑞萨R-Car X5H芯片的软件定义汽车解决方案
Nullmax VLA算法深度赋能黑芝麻智能华山A2000芯片
小鹏汽车与北京大学研究论文成功入选AAAI 2026
Nullmax感知规划端到端大模型进化提速
地平线五篇论文入选NeurIPS 2025与AAAI 2026

摩尔线程新一代大语言模型对齐框架URPO入选AAAI 2026

自动驾驶中“一段式端到端”和“二段式端到端”有什么区别?

Nullmax端到端自动驾驶最新研究成果入选ICCV 2025

一文带你厘清自动驾驶端到端架构差异

Nullmax亮相2025上海车展汽车智能化峰会




评论