 单/双目的测距原理区别
单/双目的测距原理区别

先说一下单/双目的测距原理区别:
单目测距原理:
先通过图像匹配进行目标识别(各种车型、行人、物体等),再通过目标在图像中的大小去估算目标距离。这就要求在估算距离之前首先对目标进行准确识别,是汽车还是行人,是货车、SUV还是小轿车。准确识别是准确估算距离的第一步。要做到这一点,就需要建立并不断维护一个庞大的样本特征数据库,保证这个数据库包含待识别目标的全部特征数据。比如在一些特殊地区,为了专门检测大型动物,必须先行建立大型动物的数据库;而对于另外某些区域存在一些非常规车型,也要先将这些车型的特征数据加入到数据库中。如果缺乏待识别目标的特征数据,就会导致系统无法对这些车型、物体、障碍物进行识别,从而也就无法准确估算这些目标的距离。
单/双目方案的优点与难点
从上面的介绍,单目系统的优势在于成本较低,对计算资源的要求不高,系统结构相对简单;缺点是:(1)需要不断更新和维护一个庞大的样本数据库,才能保证系统达到较高的识别率;(2)无法对非标准障碍物进行判断;(3)距离并非真正意义上的测量,准确度较低。
双目检测原理:
通过对两幅图像视差的计算,直接对前方景物(图像所拍摄到的范围)进行距离测量,而无需判断前方出现的是什么类型的障碍物。所以对于任何类型的障碍物,都能根据距离信息的变化,进行必要的预警或制动。双目摄像头的原理与人眼相似。人眼能够感知物体的远近,是由于两只眼睛对同一个物体呈现的图像存在差异,也称“视差”。物体距离越远,视差越小;反之,视差越大。视差的大小对应着物体与眼睛之间距离的远近,这也是3D电影能够使人有立体层次感知的原因。
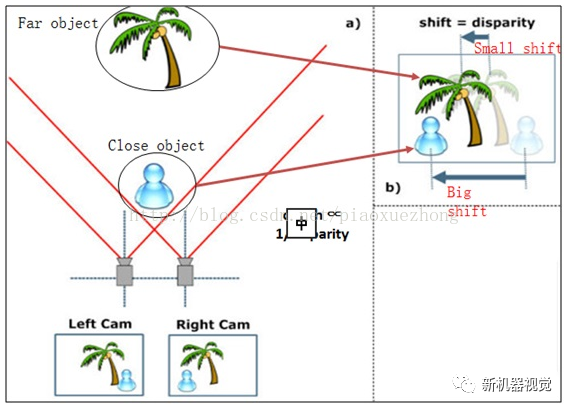
上图中的人和椰子树,人在前,椰子树在后,最下方是双目相机中的成像。其中,右侧相机成像中人在树的左侧,左侧相机成像中人在树的右侧,这是因为双目的角度不一样。再通过对比两幅图像就可以知道人眼观察树的时候视差小,而观察人时视差大。因为树的距离远,人的距离近。这就是双目三角测距的原理。双目系统对目标物体距离感知是一种绝对的测量,而非估算。
理想双目相机成像模型
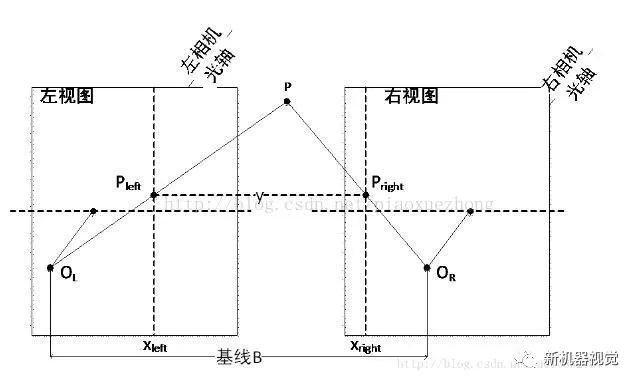
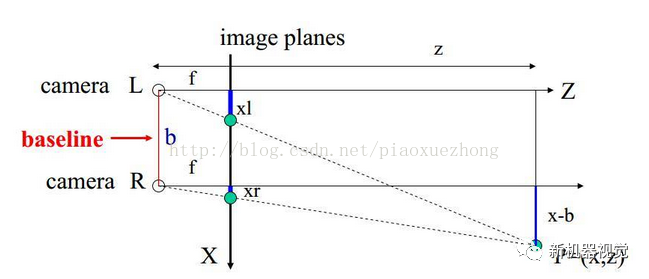
根据三角形相似定律:
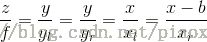 (1)
(1)
由式(1),解方程得:
 (2)
(2)
z=b*f/d, x=z*xl/d, y=z*y/f (3)
根据上述推导,要求得空间点P离相机的距离(深度)z,必须知道:
1、相机焦距f,左右相机基线b(可以通过先验信息或者相机标定得到)。
2、视差 : ,即左相机像素点(xl, yl)和右相机中对应点(xr, yr)的关系,这是双目视觉的核心问题。
,即左相机像素点(xl, yl)和右相机中对应点(xr, yr)的关系,这是双目视觉的核心问题。
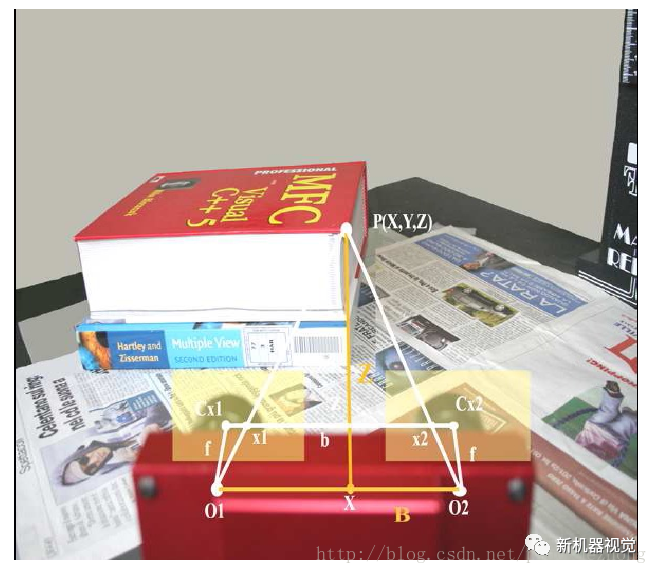
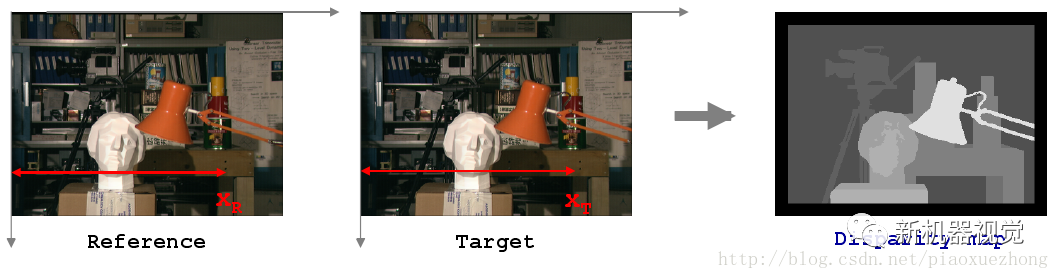
重点来看一下视差(disparity),视差是同一个空间点在两个相机成像中对应的x坐标的差值,它可以通过编码成灰度图来反映出距离的远近,离镜头越近的灰度越亮;
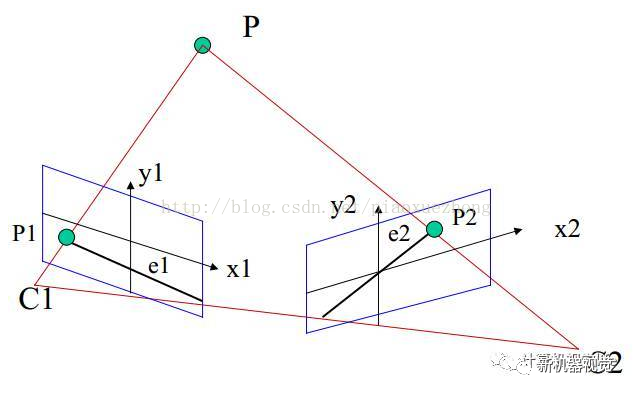
极线约束
对于左图中的一个像素点,如何确定该点在右图中的位置?需要在整个图像中地毯式搜索吗?当然不用,此时需要用到极线约束。
如上图所示。O1,O2是两个相机,P是空间中的一个点,P和两个相机中心点O1、O2形成了三维空间中的一个平面PO1O2,称为极平面(Epipolar plane)。极平面和两幅图像相交于两条直线,这两条直线称为极线(Epipolar line)。
P在相机O1中的成像点是P1,在相机O2中的成像点是P2,但是P的位置是未知的。我们的目标是:对于左图的P1点,寻找它在右图中的对应点P2,这样就能确定P点的空间位置。
极线约束(Epipolar Constraint)是指当空间点在两幅图像上分别成像时,已知左图投影点p1,那么对应右图投影点p2一定在相对于p1的极线上,这样可以极大的缩小匹配范围。即P2一定在对应极线上,所以只需要沿着极线搜索便可以找到P1的对应点P2。
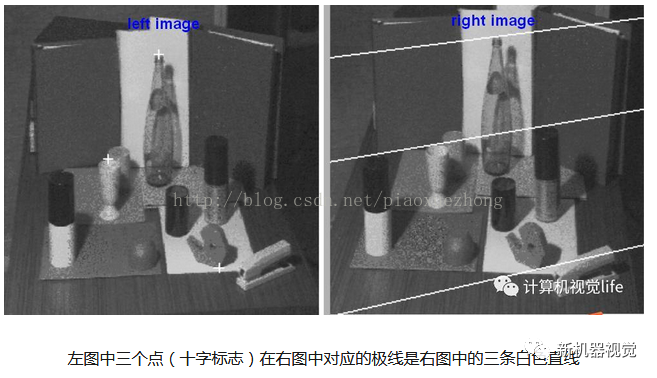
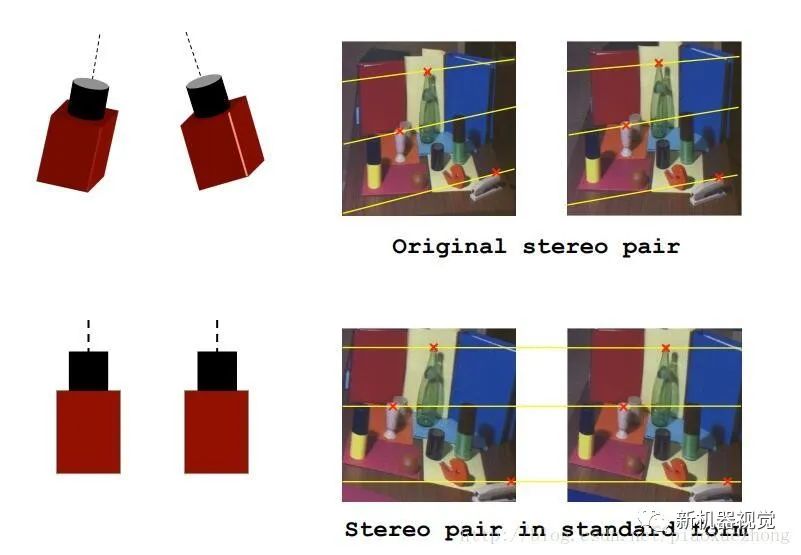
非理性情况:
上面是两相机共面且光轴平行,参数相同的理想情况,当相机O1,O2不是在同一直线上怎么办呢?事实上,这种情况非常常见,因为有些场景下两个相机需要独立固定,很难保证光心完全水平,即使固定在同一个基板上也会由于装配的原因导致光心不完全水平,如下图所示:两个相机的极线不平行,并且不共面。
这种情况下拍摄的两张左右图片,如下图所示。左图中三个十字标志的点,右图中对应的极线是右图中的三条白色直线,也就是对应的搜索区域。我们看到这三条直线并不是水平的,如果进行逐点搜索效率非常低。
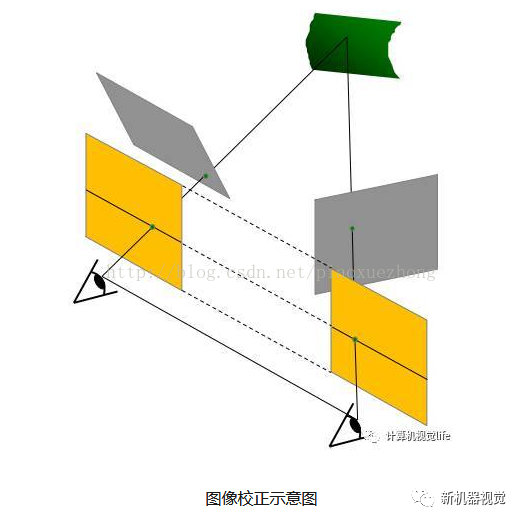
图像矫正技术
图像矫正是通过分别对两张图片用单应性矩阵(homography matrix)变换得到,目的是把两个不同方向的图像平面(下图中灰色平面)重新投影到同一个平面且光轴互相平行(下图中黄色平面),这样转化为理想情况的模型。
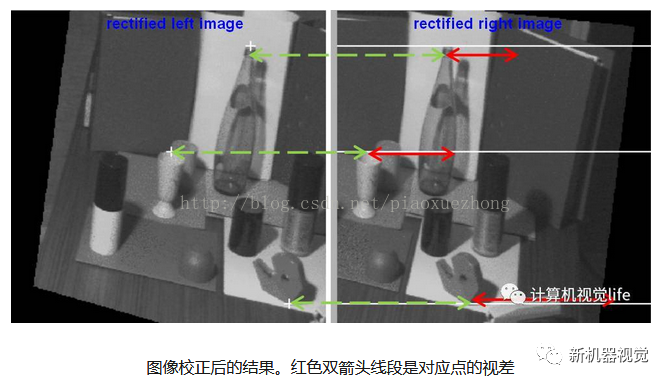
经过图像矫正后,左图中的像素点只需要沿着水平的极线方向搜索对应点就可以了。从下图中我们可以看到三个点对应的视差(红色双箭头线段)是不同的,越远的物体视差越小,越近的物体视差越大。
上面的主要工作是在极线上寻找匹配点,但是由于要保证两个相机参数完全一致是不现实的,并且外界光照变化和视角不同的影响,使得单个像素点鲁棒性很差。所以匹配工作是一项很重要的事情,这也关系着双目视觉测距的准确性。
双目视觉的工作流程
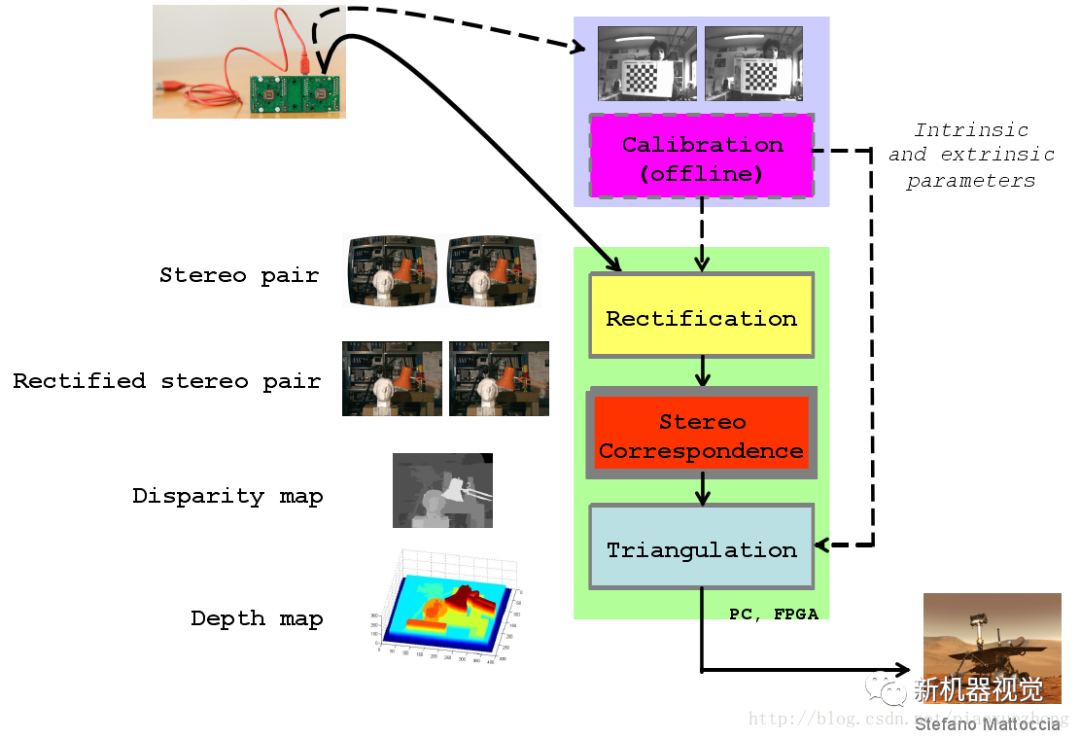
相机镜头畸变校正原理及方法,之前介绍过,这个基本是通用的,可以用张正友校准法。
双目测距的优点与难点
从上面的介绍看出,双目系统优势:(1)成本比单目系统要高,但尚处于可接受范围内,并且与激光雷达等方案相比成本较低;(2)没有识别率的限制,因为从原理上无需先进行识别再进行测算,而是对所有障碍物直接进行测量;(3)直接利用视差计算距离,精度比单目高;(4)无需维护样本数据库,因为对于双目没有样本的概念。
双目系统的难点:
(1)计算量非常大,对计算单元的性能要求非常高,这使得双目系统的产品化、小型化的难度较大。所以在芯片或FPGA上解决双目的计算问题难度比较大。国际上使用双目的研究机构或厂商,绝大多数是使用服务器进行图像处理与计算,也有部分将算法进行简化后,使用FPGA进行处理。
(2)双目的配准效果,直接影响到测距的准确性。
2.1、对环境光照非常敏感。双目立体视觉法依赖环境中的自然光线采集图像,而由于光照角度变化、光照强度变化等环境因素的影响,拍摄的两张图片亮度差别会比较大,这会对匹配算法提出很大的挑战。


2.2、不适用于单调缺乏纹理的场景。由于双目立体视觉法根据视觉特征进行图像匹配,所以对于缺乏视觉特征的场景(如天空、白墙、沙漠等)会出现匹配困难,导致匹配误差较大甚至匹配失败。

2.3、计算复杂度高。该方法需要逐像素匹配;又因为上述多种因素的影响,为保证匹配结果的鲁棒性,需要在算法中增加大量的错误剔除策略,因此对算法要求较高,想要实现可靠商用难度大,计算量较大。
2.4、相机基线限制了测量范围。测量范围和基线(两个摄像头间距)关系很大:基线越大,测量范围越远;基线越小,测量范围越近。所以基线在一定程度上限制了该深度相机的测量范围。
审核编辑 :李倩
-
图像
+关注
关注
2文章
1097浏览量
42497 -
相机
+关注
关注
5文章
1637浏览量
56083 -
数据库
+关注
关注
7文章
4092浏览量
68684
原文标题:【光电智造】双目视觉测距原理,数学推导及三维重建资源
文章出处:【微信号:今日光电,微信公众号:今日光电】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
Kneron耐能3D双目人脸识别模组荣获重磅奖项
一文带你了解双目深度相机

RTK-SCAM-60 双目立体视觉相机|精准深度感知 全场景智能视觉

ESP32驱动TFmini-S红外激光测距ToF模块进行测距

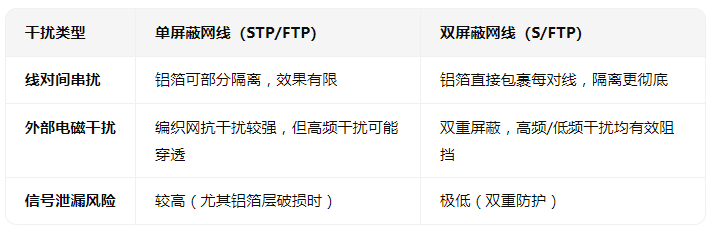
双屏蔽网线和单屏蔽网线有什么区别
双目视觉是如何实现深度估计的?

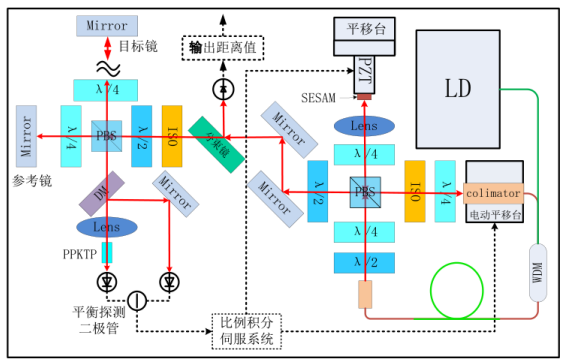
高压功率放大器在平衡光学的飞秒激光测距实验中的应用

自动驾驶既然有双目摄像头了,为什么还要三目摄像头?

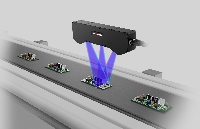
车载双目摄像头如何“看见”世界?

单光子2mm高精度激光测距仪量程300米激光测距模块可定制
高压功率放大器:实现平衡光学飞秒测距研究的核心引擎
光子精密双目3D线激光轮廓测量仪,摆脱视觉盲区,1台更比2台强!



评论