完善资料让更多小伙伴认识你,还能领取20积分哦,立即完善>
标签 > 相机
照相机是一种利用光学成像原理形成影像并使用底片记录影像的设备,是用于摄影的光学器械。在现代社会生活中有很多可以记录影像的设备,它们都具备照相机的特征,比如医学成像设备、天文观测设备等。
照相机是一种利用光学成像原理形成影像并使用底片记录影像的设备,是用于摄影的光学器械。在现代社会生活中有很多可以记录影像的设备,它们都具备照相机的特征,比如医学成像设备、天文观测设备等。
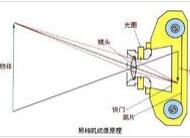
被摄景物反射出的光线通过照相镜头(摄景物镜)和控制曝光量的快门聚焦后,被摄景物在暗箱内的感光材料上形成潜像,经冲洗处理(即显影、定影)构成永久性的影像,这种技术称为摄影术,分为一般照相与专业摄像。
照相机是一种利用光学成像原理形成影像并使用底片记录影像的设备,是用于摄影的光学器械。在现代社会生活中有很多可以记录影像的设备,它们都具备照相机的特征,比如医学成像设备、天文观测设备等。
被摄景物反射出的光线通过照相镜头(摄景物镜)和控制曝光量的快门聚焦后,被摄景物在暗箱内的感光材料上形成潜像,经冲洗处理(即显影、定影)构成永久性的影像,这种技术称为摄影术,分为一般照相与专业摄像。
工作原理
照相机品种繁多,按用途可分为风光摄影照相机、印刷制版照相机、文献缩微照相机、显微照相机、水下照相机、航空照相机、高速照相机等;按照相胶片尺寸,可分为110照相机(画面13×17毫米)、126照相机(画面28×28毫米)、135照相机(画面24×18,24×36毫米)、127照相机(画面45x45毫米)、120照相机(包括220照相机,画面60×45,60×60,60×90毫米)、圆盘照相机(画面8.2x10.6毫米);按取景方式分为透视取景照相机、双镜头反光照相机、单镜头反光照相机。
任何一种分类方法都不能包括所有的照相机,对某一照相机又可分为若干类别,例如135照相机按其取景、快门、测光、输片、曝光、闪光灯、调焦、自拍等方式的不同 ,就构成一个复杂的型谱。照相机利用光的直线传播性质和光的折射与反射规律,以光子为载体,把某一瞬间的被摄景物的光信息量,以能量方式经照相镜头传递给感光材料,最终成为可视的影像。照相机的光学成像系统是按照几何光学原理设计的,并通过镜头,把景物影像通过光线的直线传播、折射或反射准确地聚焦在像平面上。摄影时,必须控制合适的曝光量,也就是控制到达感光材料上的合适的光子量。因为银盐感光材料接收光子量的多少有一限定范围,光子量过少形不成潜影核,光子量过多形成过曝,图像又不能分辨。照相机是用光圈改变镜头通光口径大小,来控制单位时间到达感光材料的光子量,同时用改变快门的开闭时间来控制曝光时间的长短。
从完成摄影的功能来说,照相机大致要具备成像、曝光和辅助三大结构系统。成像系统包括成像镜头、测距调焦、取景系统、附加透镜、滤光镜、效果镜等;曝光系统包括快门机构、光圈机构、测光系统、闪光系统、自拍机构等;辅助系统包括卷片机构、计数机构、倒片机构等。
镜头是用以成像的光学系统,由一系列光学镜片和镜筒所组成,每个镜头都有焦距和相对口径两个特征数据;取景器是用来选取景物和构图的装置,通过取景器看到的景物,凡能落在画面框内的部分,均能拍摄在胶片上 ;测距器可以测量出景物的距离,它常与取景器组合在一起,通过连动机构可将测距和镜头调焦联系起来,在测距的同时完成调焦。
光学透视或单镜头反光式取景测距器都须手动操作,并用肉眼判断。此外还有光电测距、声纳测距、红外线测距等方法,可免除手动操作,又能避免肉眼判断带来的误差,以实现自动测距。
快门是控制曝光量的主要部件,最常见的快门有镜头快门和焦平面快门两类。镜头快门是由一组很薄的金属叶片组成,在主弹簧的作用下,连杆和拨圈的动作使叶片迅速地开启和关闭 ;焦平面快门是由两组部分重叠的帘幕(前帘和后帘)构成,装在焦平面前方附近。两帘幕按先后次序启动,以便形成一个缝隙。缝隙在胶片前方扫过,以实现曝光。
光圈又叫光阑,是限制光束通过的机构,装在镜头中间或后方。光圈能改变光路口径,并与快门一起控制曝光量。常见的光圈有连续可变式和非连续可变式两种。
自拍机构是在摄影过程中起延时作用,以供摄影者自拍的装置。使用自拍机构时,首先释放延时器,经延时后再自动释放快门。自拍机构有机械式和电子式两种,机械式自拍机构是一种齿轮传动的延时机构,一般可延时8~12秒 ;电子式自拍机构利用一个电子延时线路控制快门释放。
结构和元件
通常,照相机主要元件包括:成像元件、暗室、成像介质与成像控制结构。
成像元件可以进行成像。通常是由光学玻璃制成的透镜组,称之为镜头。小孔、电磁线圈等在特定的设备上都起到了“镜头”的作用。
成像介质则负责捕捉和记录影像。包括底片、CCD、CMOS等。
暗室为镜头与成像介质之间提供一个连接并保护成像介质不受干扰。
控制结构可以改变成像或记录影像的方式以影像最终的成像效果。光圈、快门、聚焦控制等。
成像过程
传统相机成像
1.镜头把景物影象聚焦在胶片上2、片上的感光剂随光发生变化3.片上受光后变化了的感光剂经显影液显影和定影4. 形成和景物相反或色彩互补的影象5. 所形成的像是实像[2]
数码相机成像
1.经过镜头光聚焦在CCD或CMOS上2.CCD或CMOS将光转换成电信号3.经处理器加工,记录在相机的内存上4.通过电脑处理和显示器的电光转换,或经打印机打印便形成影象。具体过程:光线从镜头进入相机,CCD进行滤色、感光(光电转化),按照一定的排列方式将拍摄物体“分解”成了一个一个的像素点,这些像素点以模拟图像信号的形式转移到“模数转换器”上,转换成数字信号,传送到图像处理器上,处理成真正的图像,之后压缩存储到存储介质中。对胶片相机而言,景物的反射光线经过镜头的会聚,在胶片上形成潜应影,这个潜影是光和胶片上的乳剂产生化学反应的结果。再经过显影和定影处理就形成了影像。数码相机是通过光学系统将影像聚焦在成像元件CCD/ CMOS 上,通过A/D转换器将每个像素上光电信号转变成数码信号,再经DSP处理成数码图像,存储到存储介质当中。


应用案例 | 深视智能sCMOS科学相机助力胚胎成纤维细胞多通道荧光成像
01实验背景在细胞生物学、发育生物学与药物研发等领域,胚胎成纤维细胞已成为研究细胞迁移、铺展、骨架重构及细胞器功能的重要模型。该类细胞形态变化明显、贴壁...

RTK-SCAM-60 双目立体视觉相机|精准深度感知 全场景智能视觉
RTK-SCAM-60双目相机是一款专为三维空间感知与距离测量打造的高精度双目立体视觉相机,整机采用5V低压供电模式,无需外接独立电源,真正实现即插即用...

产品推荐 | 极端环境下的高速成像:深视智能AIR系列如何突破“拍得清”的物理极限
在科学实验和工程测试领域,高速相机是实验中常用的仪器设备。火箭点火、碰撞测试、靶场弹道——这些关键数据往往隐匿于一瞬间,高速相机所具备的超高采集速度,使...

AI应用的拓广,使得AI模块也不断革新,大家都希望有更轻、更小、功耗更低的AI模块,以减轻自家产品的负担。经过不断的测试验证,成都慧视开发的针对于这些需...

列车360°动态图像检测系统是一套专为列车运维检修设计的智能图像检测解决方案,该系统具有360°全车成像、智能故障诊断与数据驱动运维三大核心功能,显著提...

应用案例 | 40倍镜下解析小鼠脑部神经元:深视智能sCMOS相机赋能膜片钳实验高效开展
01实验背景小鼠脑部神经元膜片钳实验是神经科学领域的关键技术,广泛应用于神经系统疾病机制研究、药物筛选及神经环路解析等核心方向。该实验的两大核心难点:一...
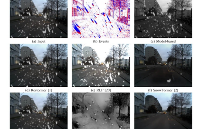
背景与问题在暴雪等恶劣天气条件下,自动驾驶系统的视觉感知能力显著下降。雪花的快速移动和密集遮挡会在摄像头图像中形成高亮点、拖影或随机噪声,使道路、车辆及...

每天,从早餐的外带咖啡杯到午后的矿泉水瓶,从快递包装到家居用品,塑料已无处不在。然而,这些被丢弃的塑料若混合处理,不仅浪费资源,更可能造成环境污染。高效...

应用案例 | 深视智能高速相机以5000帧率捕捉液滴撞击电池板瞬态,助力锂电池灭火剂高效研发
01实验背景锂离子电池因具有能量密度高、循环性能好、环保等优势,已成为储能系统、电动汽车和便携电子产品的核心技术。然而,近年来锂电池热失控事故频发,严重...
基于Raspberry Pi远程查看项目AstralPi的第一个版本立即下载
类别:电子资料 2023-07-13 标签:机器人相机Raspberry Pi
高光谱相机的“鱼与熊掌”:空间分辨率与光谱分辨率,如何兼得?
如果你关注过遥感、精准农业、医学影像或工业检测,大概率听说过 高光谱成像 。这项技术能同时拍下目标的“照片”和“指纹”——既有清晰的空间图像,又有精细到...

当前,整个制造行业正在迅速采用更高分辨率的传感器、更快的检测产线以及日益复杂的多相机架构。随着系统规模不断扩大,大家发现最严峻的问题往往并非源自相机本身...

柑橘黄龙病(HLB)被称作柑橘产业的 “癌症”,是全球柑橘种植中最具毁灭性的细菌性病害。它潜伏期长达数月至一年,早期症状极度隐蔽,传播速度极快,一旦暴发...
徕卡相机和长光辰芯联合开发下一代高性能影像级CMOS图像传感器
德国韦茨拉尔、中国长春,2026年4月20日, 国际高端相机品牌徕卡和全球领先的高性能CMOS图像传感器供应商长光辰芯宣布开启战略合作新篇章。

城市化进程不断加速的今天,停车场景早已不再是简单的“水泥盒子”。它变成了城市交通的毛细血管,也是检验智慧城市运营效率的试金石。无论是商业综合体的潮汐客流...

弱光强辨 | 深视智能sCMOS相机亮相细胞学大会,为细胞荧光观测提供新选择
近日,深视智能携sCMOS相机系列产品亮相中国细胞生物学学会2026年全国学术大会。本届大会聚焦“细胞器与结构”、“跨尺度调控”、“细胞命运与再生”等前...

成果登上《Nature Communications》:深视智能高速相机助力破解神经形态成像验证难题
型号SH3-10101背景:传统图像传感器遭遇效率瓶颈随着自动驾驶等智能视觉应用的快速发展,传统的CCD与CMOS图像传感器逐渐暴露出感知、存储与计算分...

NeurIPS 2024 | 丝滑视觉新极限:EPA 框架利用事件相机突破插帧伪影瓶颈
核心提要:传统视频插帧在极高速运动下难逃“重影”与“撕裂”。北京理工大学团队提出的EPA(PerceptuallyAligned)框架,通过感知对齐学习...

国防科大EVS新作:事件视觉挑战精密监测极限,220μs 极速响应实现毫米级形变捕捉!
核心提要:针对大型桥梁、高精机床等结构的高频振动监测,传统加速度计部署难、视觉方案带宽大的矛盾始终存在。该论文提出了一种异步事件流去噪算法,在过滤90%...

在三维感知技术快速迭代的现在,深度相机作为机器获取空间信息的重要“眼睛”,已渗透到工业自动化、机器人导航、AR/VR、智能家居等多个领域。其中,双目深度...
 换一批
换一批
编辑推荐厂商产品技术软件/工具OS/语言教程专题
| 电机控制 | DSP | 氮化镓 | 功率放大器 | ChatGPT | 自动驾驶 | TI | 瑞萨电子 |
| BLDC | PLC | 碳化硅 | 二极管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 无刷电机 | FOC | IGBT | 逆变器 | 文心一言 | 5G | 英飞凌 | 罗姆 |
| 直流电机 | PID | MOSFET | 传感器 | 人工智能 | 物联网 | NXP | 赛灵思 |
| 步进电机 | SPWM | 充电桩 | IPM | 机器视觉 | 无人机 | 三菱电机 | ST |
| 伺服电机 | SVPWM | 光伏发电 | UPS | AR | 智能电网 | 国民技术 | Microchip |
| 开关电源 | 步进电机 | 无线充电 | LabVIEW | EMC | PLC | OLED | 单片机 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 蓝牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太网 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 语音识别 | 万用表 | CPLD | 耦合 | 电路仿真 | 电容滤波 | 保护电路 | 看门狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 阈值电压 | UART | 机器学习 | TensorFlow |
| Arduino | BeagleBone | 树莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 华秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
关注我们的微信

下载发烧友APP

机器人发烧友


