 车载双目摄像头如何“看见”世界?
车载双目摄像头如何“看见”世界?

[首发于智驾最前沿微信公众号]想要让车辆知道前方有什么、距离多远、是否可以靠近,首先要做的是让其“看”清楚环境。在众多车载感知硬件中,与人类看到世界最类似的一个感知硬件便是车载双目摄像头了。

图片源自:网络
车载双目摄像头(也称立体视觉摄像头,Stereo Camera)模仿人眼的视觉机制,通过两个略有间距的摄像头同时拍摄同一场景,比较两幅图像之间的差异,从而计算出深度信息。
与单目摄像头只能识别形状、颜色,或依赖学习来估算距离不同,双目系统能够直接量化物体到车辆的距离,这对于碰撞风险评估、精准停车、障碍物避让等任务至关重要。

基本原理,用两张图还原三维信息
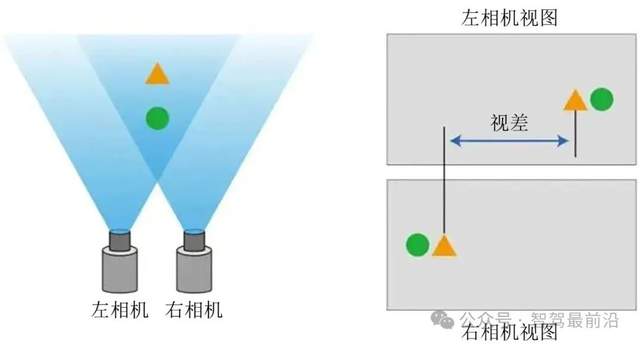
简单理解车载双目摄像头,就是将两个摄像头并排安装,朝向前方,它们之间有一个固定的横向距离,称为“基线(baseline)”。同一个物体在左图和右图中的成像位置通常会有差异,这个水平方向的位置差异称为“视差(disparity)”。对左右图像进行几何校正后,可以把匹配点限制在同一水平线上进行搜索,视差就是像素在水平方向上的偏移量。
图片源自:网络
根据成像模型,物体的真实距离Z与相机焦距f、基线B和视差d之间满足一个简单的关系:Z = f × B / d。也就是说,视差越大,物体越近;视差越小,物体越远。想要让车载双目摄像头符合这一公式,必须让摄像头经过内参(如焦距、畸变系数)和外参(两个摄像头之间的位置关系)的精确标定,标定的精度将直接决定深度估计的准确性。
车载双目摄像头拍摄只是两张图片,并不包含深度信息,如果想通过这两张图片信息计算出深度,需要经过一系列的操作。首先是要将摄像头进行标定,获取内外参数,并进行图像畸变校正与极线校正,使左右图像的对应点基本位于同一水平线上,从而降低匹配的复杂度。接着就是要进行立体匹配,即为左图中的每一个像素,在右图中找到最可能的对应像素,这是整个流程中最关键的一步。传统的方法有基于块匹配、基于代价聚合的半全局匹配等;但近年来,随着深度学习方法逐渐流行,通过端到端的代价构建、聚合与回归,能够进行更准确、更鲁棒的视差估计。最后要做的就是将视差转换为真实深度,并配合置信度估计与后处理(如孔洞填充、平滑滤波),输出能有效提升下游任务效果的深度图。。

算法与实现,从传统方法到深度学习
早期的立体视觉算法更关注如何准确定义像素之间的匹配代价,以及如何将局部匹配结果优化成一张全局一致的视差图。在进行像素级匹配时,常用的代价函数有颜色差异、SAD(绝对差和)、SSD(平方差和),以及对于光照变化更具鲁棒性的Census变换等方法。得到初步的匹配代价后,还需经过代价聚合与优化步骤,以抑制噪声和错误匹配。其中,半全局匹配(SGM)通过沿多个路径聚合代价,在效率和精度之间取得了出色平衡,因此成为车载系统中广泛采用的经典算法。
近年来,随着计算能力的显著提升,基于卷积神经网络(CNN)的立体匹配方法迅速发展。这类方法利用神经网络从数据中学习更鲁棒、更高级的匹配特征,通过构建三维代价体进行精细的匹配比较,最终通过回归或软分类方法直接输出视差图。深度学习方法在弱纹理、重复纹理和剧烈光照变化等传统算法难以处理的场景下,能表现出更强的稳健性。然而,其性能也高度依赖训练数据的多样性和完备性,以及对边缘场景的泛化能力。
在实际的项目中,立体视觉会被整合到更大的感知链路中。单帧视差图容易受噪声影响,因此会使用时序滤波或多视图融合技术,结合来自IMU或里程计的位姿信息,将相邻帧的深度信息对齐融合,从而提高远处目标和弱纹理区域的可靠性。此外,双目系统还会与语义分割或目标检测模块联动,一旦检测到行人或车辆,可以在这些区域内进行更精细的匹配与置信度评估,从而实现语义信息与几何信息的相互校验,减少误检与漏检的情况发生。

为什么车厂和Tier-1青睐双目摄像头
双目摄像头相比其他传感器具备几项明显优势,使其在自动驾驶系统中始终占有一席之地。它采用被动成像,不像激光雷达或毫米波雷达那样主动发射能量,没有电磁辐射问题,在法律合规、隐私保护、能耗和成本方面更容易被大众接受。
它的语义信息也更加丰富,摄像头直接输出高分辨率的彩色图像,对识别车道线、交通标志、信号灯、路面纹理和行人外观等具有天然优势,这些信息对语义理解和行为预测至关重要
双目系统还具备高横向分辨率,能够清晰捕捉像是车道线、路缘、人行道边界等细微结构,这是很多测距型传感器难以替代的。
双目摄像头相比高精度的固态或机械式激光雷达更是低廉得多,更适合大规模量产车型的传感器配置。此外,它体积小、功耗低,特别适用于短距离感知、泊车辅助、低速城市路况,或作为其他昂贵传感器的有效补充。
双目系统生成的密集深度图(而非稀疏点云)也更适合某些算法需求,双目系统作为视觉子系统的一部分,更能与单目视觉、雷达、激光雷达等形成互补,提升整体感知的鲁棒性。

车载双目摄像头有哪些问题
即便车载双目摄像头的优势非常明显,但其也有很多摄像头存在的固有的问题。它对环境条件非常敏感,像是在弱光、夜间、逆光、雨雪雾等天气下,会显著降低匹配质量,导致视差图噪声增加或出现大范围低置信度区域。与激光雷达不同,摄像头也无法穿透雨雾,因此在极端天气下仅靠双目难以保证安全。
在面对缺乏纹理或重复纹理的区域(如白墙、单色车身),立体匹配容易出错甚至无法找到对应点。对于反光或半透明物体(如积水、玻璃窗),摄像头更可能产生虚假几何信息,导致深度估计错误。
双目的有效距离也受摄像头分辨率和基线设计的限制。对于远处的小目标(如高速路上数十米外的小障碍物),视差可能小于一个像素,这会导致误差被放大。
由于双目摄像头左右视角不同,某些区域在一侧摄像头中可见,在另一侧却不可见,这会导致视差缺失或匹配错误。双目系统对标定精度依赖也极高,任何微小的几何偏移都可能导致系统性误差,对长期使用的稳定性提出挑战。

车载双目摄像头装车要点
将双目摄像头部署到车辆上,并不只是将摄像头固定在车头那么简单。安装时的基线长度、摄像头分辨率、镜头视角、曝光策略和同步机制都需要精心计算。基线越长,对远处物体的深度分辨率越好,但也会导致结构尺寸增大,并可能在近距离出现视差饱和问题。在城市低速场景中,短基线双目已足够使用,且更易于安装;若要用于高速公路等需要检测远距离目标的场景,则需要更长的基线、更高分辨率的传感器或更长焦距的镜头。
摄像头的时间同步也非常关键,左右图像必须在极短时间内完成采集,否则车辆或周围物体的运动会导致视差计算错误。车规级的双目模块通常会在硬件层面实现触发同步,并在模块内部完成初步标定与校正,以降低系统集成的复杂度。
标定与标定维护是最容易被低估的环节。摄像头标定需要精确估计内参(焦距、主点、畸变)和外参(两个摄像头之间的旋转与平移)。车辆经过颠簸或轻微碰撞后,摄像头支架可能发生微小偏移,导致深度估计出现偏差。因此,要设计定期自标定或在线标定的策略,利用车道线、路面平面或其他结构化特征自动校正外参。
此外,曝光与HDR策略也不容忽视,摄像头需要在逆光、强光对比等复杂光照条件下保证图像可用。很多系统会采用多曝光或自动增益控制来扩展动态范围,并在图像处理阶段进行光照归一化,以提高匹配的鲁棒性。
高精度深度估计,尤其是基于深度学习的方法,需要较大的计算量,在成本受限的量产车上必须进行权衡。在常规驾驶场景下,可使用轻量级或优化后的传统算法输出初步深度结果;当系统检测到复杂或关键场景(如行人密集、道路狭窄)时,再触发更精细的深度网络进行处理。还可以将计算密集型任务分配给车载高性能计算单元,并采用稀疏化或分层处理技术来节省资源。

最后的话
双目摄像头就像是自动驾驶感知工具箱中的一把得力工具,但正如螺丝刀不能替代锤子,它也无法解决所有感知问题,但在其优势场景下,它却能以出色的性价比完成感知任务。真正可靠的自动驾驶系统,是要通过一群各具所长、又各有短板的技术工具的默契配合,在取长补短中构建起来的。
审核编辑 黄宇
-
摄像头
+关注
关注
61文章
5119浏览量
103552 -
自动驾驶
+关注
关注
795文章
15025浏览量
181775
发布评论请先 登录
摄像头可靠性EMC设计优化

RK平台车载摄像头开发:从底层到应用的全面解析

自动驾驶汽车如何依靠摄像头判断距离?

ESP32-S3在初始化摄像头时检测到摄像头模组型号不被支持
什么是汽车车载摄像头气密性检测仪-岳信仪器

车内安防 + 车外识别,车载 IPC 摄像头成为出行安全守护者

电池模拟器为车载摄像头量产测试植入“精准电力标尺”
自动驾驶既然有双目摄像头了,为什么还要三目摄像头?

激光焊接技术在焊接车载摄像头工艺中的应用

保隆科技COB封装摄像头通过AEC-Q认证
激光振镜扫描锡焊技术在车载摄像头模组中的应用

红外摄像头模组是什么?科技时代的眼睛




评论