机器人操控系统在进入动态现实环境时,难以应对持续变化的物体、光照条件及接触动力学。此外,仿真与现实之间的差距,以及未经过优化的抓手或工具,通常限制了机器人在多样化任务中的泛化能力、长视距任务的执行能力,以及实现类人灵巧操作的可靠性。
2025-12-31 16:05:54 798
798 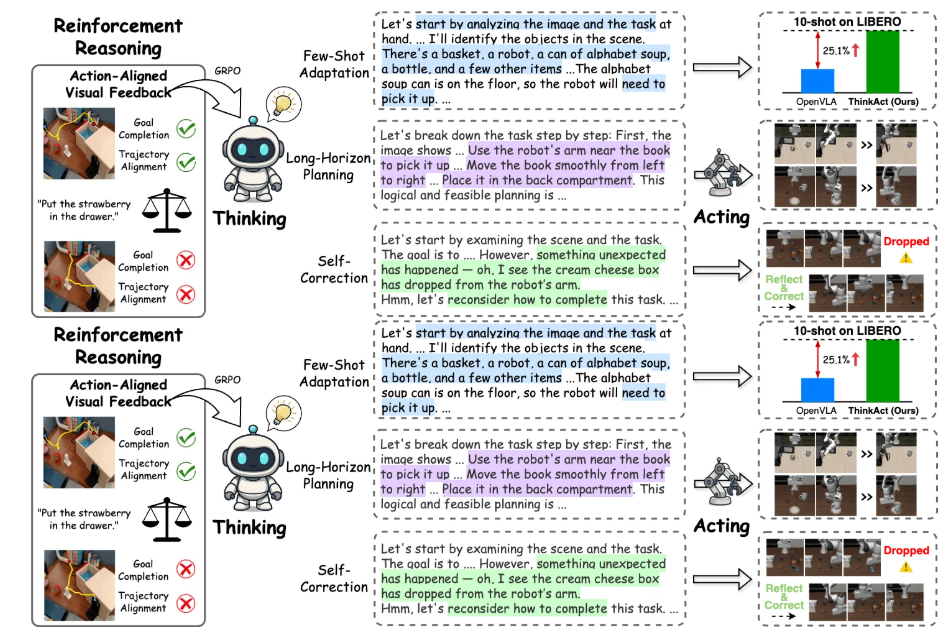
12月5日,智能机器人操作系统开源社区(AGIROS)生态大会在北京圆满举行。大会以“开源聚智,筑基未来”为主题,汇聚来自全国顶尖科研机构、领军企业、核心开发者及行业伙伴,共探智能机器人产业生态融合新路径。
2025-12-22 14:49:10308 
在工业机器人、协作机器人、医疗机器人等领域,安全操作始终是核心诉求——从工业机械臂的动力系统过载失控,到服务机器人的电路短路起火,再到医疗机器人的精准动力控制失效,各类安全隐患直接威胁设备稳定与人
2025-12-22 09:04:221031 
渗透率同比提升2个百分点。埃斯顿机器人实现近20%的同比增长,占中国机器人市场份额10.3%,成为首个登顶中国机器人市场的国产机器人品牌。 12月18日,埃斯顿自动化执行总裁周爱林在“第六届中国机器人行业年会”上表示:“具身智能作为AI的物理载体,它集成了我
2025-12-22 07:15:009611 
3000W机器人设备配件激光焊接系统整体介绍该系统并非单一设备,而是一套集成了高功率激光器、工业机器人、专业焊接头、工作台、控制系统及安全防护于一体的自动化智能制造单元。其核心价值在于为机器人
2025-12-18 09:45:21
近年来,随着机器人技术不断演进,传统特定任务型机器人逐渐演变成更智能、自主的人形机器人。受劳动力短缺、AI 自动化需求提升等因素的推动,市场关注度和需求不断提升,人形机器人正从概念走向规模化应用。
2025-12-15 10:05:061018 EtherCAT主站协议栈EC-Master在ROS(机器人操作系统)中的应用
2025-12-10 14:46:20324 
当人形机器人精准抓取零件、平稳迈步前行、默契配合人类完成复杂作业时,鲜有人留意到,藏在金属关节与智能模块之间的线束,正悄然承担着“生命线”的使命。随着人形机器人产业化浪潮加速,这份“隐形使命”被赋予
2025-12-05 08:00:37492 
应用,特别是机器人操作系统领域的可行性。MUSE Pi Pro以其强大的K1 AI CPU和官方对主流开源软件栈的积极适配,成为了一个非常有吸引力的选择。
二、 硬件初窥:性能小钢炮
MUSE Pi Pro
2025-12-03 14:40:05
近日,全球领先的服务机器人企业普渡机器人宣布与亚朵集团达成重要合作,普渡的楼宇配送机器人“闪电匣” 正式上线亚朵集团供应商库,成为亚朵旗下酒店智能化升级的重要合作伙伴。这一合作标志着两家企业在提升酒店服务体验方面的理念高度契合,共同推动酒店行业的数字化、智能化转型。
2025-12-03 11:04:13288 3000W机器人双工位翻转平台激光焊接机这款设备是现代高端智能制造的典型代表,它集成了大功率激光器、工业机器人、自动化双工位翻转平台及先进控制系统,实现了高效率、高精度、高质量的自动化激光焊接。一
2025-11-24 13:56:24
一、背景:机器人迈向“微米级控制时代”
随着智能制造和自动化产业的持续升级,工业机器人不再仅仅承担重复搬运,而是被要求在装配、检测、精密加工等高精度场景中完成微米级控制任务。
在这些“高精度机器人
2025-11-14 15:48:29
当前,机器人要实现如人类般灵巧的操作,其触觉感知系统正面临三大核心瓶颈:功耗高导致续航受限,数据量大引发延迟响应,以及系统复杂制约集成部署。这些因素共同限制了机器人在精细操作、人机安全交互等场景下的应用深度与广度。
2025-11-08 15:39:061959 
科义轨道式巡检机器人:高精度智能巡检解决方案精准定位系统:毫米级路径控制技术科义轨道式巡检机器人搭载激光导航系统,实现±5毫米级定位精度,支持多机协同作业,形成无死角巡检网络。
2025-11-06 09:44:02
、远程作业机器人、特种检测机器人· 多摄像头输入:通过多路摄像头无死角监控作业现场,实现精准操作与安全监控。· 多屏显示:将不同视角的画面、传感器数据、控制界面分别显示,帮助操作员远程精准控制。高端服务
2025-10-29 16:41:20
2000W机器人园林铲激光焊接工作站一、 设备概述2000W机器人园林铲激光焊接机是一种集成了高功率激光器、工业机器人和先进控制系统的现代化、自动化焊接解决方案。它专门为解决园林工具(如铁铲、锄头
2025-10-24 14:14:32
经过我的申请,
马老师发放了,
小萝卜机器人的,
开发权限,
原来的小萝卜公司,
因为经营不善倒闭,
作为科研产品,
几个技术对此惋惜,
自掏腰包,
要让小萝卜机器人,
再生,
每次听到小萝卜说
2025-10-23 05:24:26
的时候会自动下载对应版本的库文件。
RVStarArduino库的主界面1
RVStarArduino库的主界面2
核心算法
巡线解迷宫机器人的软件部分主要涉及传感器读取以及PID控制等核心
2025-10-20 10:39:51
核心技术,突破场景局限 科义履带式巡检机器人以 双导航系统为核心,搭配综合悬挂系统,轻松跨越复杂地形,实现灵活移动与≤30° 爬坡能力,7×24 小时全天候运行无忧。双光云台集成可见光
2025-10-16 10:29:44
Arduino Uno l两轮自平衡机器人 电机驱动无输出求解
2025-10-15 06:36:24
在电子电器生产制造过程中,气密性检测至关重要,它关乎产品的质量、性能以及使用寿命。而一款操作便捷的电子电器气密性检测仪,能大大提高检测效率和质量。其中,人性化操作界面的电子电器气密性检测仪更是备受
2025-10-13 16:12:39444 
随着机器人技术的发展,机器人在工业制造、物流管理、医疗护理等领域得到了广泛的应用,而 机器人的温度控制与监测 则是机器人操作和维护的重要一环。这时候,温度传感器技术就显得至关重要
2025-10-09 10:24:13222 
作者: Aswin S Babu 什么是机器人? 在日常生活里,“机器人”一词我们都不陌生,日常交谈中也常常脱口而出。但大家可曾细想过,这个词的真正含义究竟为何?接下来,不妨花些时间,深入探究机器人
2025-10-02 16:32:004451 
给大家带来一些机器人的行业资讯: 宁德时代入股银河通用机器人 企查查APP数据显示北京银河通用机器人有限公司发生工商变更,宁德时代通过全资子公司宁波梅山保税港区问鼎投资有限公司入股北京银河通用机器人
2025-09-29 15:27:292699 中图仪器GTS运动机器人位置激光跟踪仪集激光干涉测距技术、光电检测技术、精密机械技术、计算机及控制技术、现代数值计算理论于一体,是高精度、便携式的空间大尺寸坐标测量机,是同时具高精度(μm级)、大工
2025-09-09 15:05:00
泰科机器人凭借十多年的技术积淀与持续创新,已成功推出多款高性能人形机器人四肢的解决方案。今天,泰科机器人再次迎来重大突破——首款自主研发的双足人形机器人硬件本体正式发布!这一突破标志着泰科机器人在核心技术转化与人形机器人应用领域迈出关键一步。
2025-09-02 14:34:113039 
2025年8月13日下午,中标质检标准化技术(深圳)有限公司许主任带队与本标准有关人员一起,来到《康养机器人性能测试方法》标准主要制定单位深圳市江智工业技术有限公司工厂与公司总经理赵岁民以及相关
2025-09-02 14:22:181618 
01工业机器人的市场现况在当前的制造业中,工业机器人已成为自动化生产线的关键组成部分。随着技术的不断进步和创新,机器人正变得更加灵活、智能化,并能够执行更加复杂的任务。在此背景下,高性能的电容器成为
2025-09-01 10:06:57428 
机器人关节模组是一种用于驱动机器人关节转动、轮子旋转或控制夹爪运动的装置。根据负载需求,机器人关节模组有多种类型。负载通常涉及扭矩、精度、操作速度、功耗等因素。机器人关节模组的工作原理是将能量转化为物理运动,通常产生线性或旋转运动。
2025-08-29 14:22:242768 
电子发烧友网报道(文/莫婷婷)传统机器人泛化性差,智能程度相对较低。具身智能机器人具有高通用性,可在各类场景完成复杂任务,包括快速理解复杂环境、能够处理任意物体、自主处理多样化任务、底层模型具有高度
2025-08-29 11:30:017938 
高工机器人产业研究所(GGII)数据显示,2024年中国工业机器人应用市场中,用于搬运码垛、焊接、喷涂、装配及抛光打磨等操作的机器人占比将近95%左右,其中搬运码垛、上下料机器人的占比最高,占据一半以上的份额。
2025-08-26 14:14:311657 机器人获得更接近人类的触觉反馈。
赛事首席技术官王博士表示:“当机器人开始‘感知’而非‘计算’环境时,真正的智能化竞技时代才算到来。” 未来,磁传感器技术的持续进化,必将不断改写人形机器人运动的竞争规则与技术标准,推动机器人向更高水平的智能化竞技迈进。
2025-08-26 10:02:02
的首选方案。本文将围绕MT6701磁编码器芯片在机器人关节中的集成应用,探讨模块化设计方法与驱动优化策略,为高性能机器人关节开发提供技术参考。
2025-08-20 17:26:311005 
医院HDU高依赖康复病房病人/养老场景易发病老人江智病症监护机器人JZR15605201应用场景:专对医院HDU高依赖康复病房病人病症监护专对养老场景易发病老人病症监护2 机器人
2025-08-18 16:19:17
。技术优势经世智能复合机器人产品使用了自主研发的复合机器人一体化控制系统和复合机器人车身姿态动态补偿技术,有效保障抓取的精度和稳定性,抓取综合重复定位精度达到行业领先的
2025-08-13 13:53:28
产品简介经世智能档案存取复合机器人,在智慧档案库房行业主要应用于档案自动存取与转运、涉密档案管理等环节,通过“AGV移动底盘+协作机械臂+视觉系统”一体化控制方案实现高效自动化作业。机器人机械臂末端
2025-08-13 13:36:24
产品简介经世智能半导体行业晶圆盒转运复合机器人,复合机器人在半导体行业主要应用于晶圆盒转运、机台上下料等环节,通过“AGV移动底盘+协作机械臂+视觉系统"一体化控制方案实现高效自动化作业。机器人
2025-08-13 13:28:39
产品简介经世智能实验室物料转运复合机器人,复合机器人在智慧实验室行业主要应用于实验样本自动化转运、高通量实验流程衔接、危险物料与废弃物处理等环节,通过“AGV移动底盘+协作机械臂+视觉系统”一体化
2025-08-13 10:06:22
夹具,车身可定制物料缓存架。技术优势经世智能复合机器人产品使用了自主研发的复合机器人一体化控制系统和复合机器人车身姿态动态补偿技术,有效保障抓取的精度和稳定性,抓
2025-08-13 09:47:30
电子发烧友网综合报道 8月4日,蓝思科技在接受调研时披露公司在人形机器人领域的最新进展。蓝思科技表示,2024年起已为合作伙伴交付数百台整机,今年则承接了智元机器人全系列多款人形机器人业务。 蓝
2025-08-05 15:46:503835 近年来国家陆续出台相关机器人的发展规划,推进机器人产业创新。在工业、汽车制造、消费电子、新能源等众多领域中,工业机器人的应用大幅度增加,包括核心组件工业机器人线束的需求也迅速增长。工业搬运机器人
2025-08-01 08:03:411345 机器人技术的快速发展离不开核心硬件——机器人芯片。作为机器人的“大脑”,芯片决定了机器人的计算能力、响应速度和智能化水平。随着人工智能(AI)、边缘计算和5G技术的进步,机器人芯片正朝着高性能
2025-07-31 13:43:19887 动能。 尽管人形机器人凭借科幻形象备受瞩目,但在制造业智能化转型的浪潮中, 工业机器人 仍是不可或缺的核心力量。 智能制造工业机器人应用 (一)政策 中国在推动机器人产业发展的过程中,工业机器人的发展相对较为成熟
2025-07-31 09:09:05495 
清华大学与银河通用机器人联合研发,推出了专为人形机器人全身仿真遥操作设计的平台 OpenWBT_Isaac。该平台依托 NVIDIA Isaac Sim 与 Isaac Lab 的强大仿真能力构建
2025-07-28 15:01:161482 生产可以提高产品品质。通过设定相同的程序,机器人可实现重复操作,保证了产品的标准化;在精细化生产方面,工业机器人可实现低于0.1毫米的运动精度,可以完成精细的雕刻工作。提高产出
由于机器人可以代替工人完成
2025-07-26 11:22:07
机器人操作系统M-RobotsOS,推动机器人行业生态融合、能力复用、智能协同。构建机器人共通语言解决产业协同难题机器人行业正面临两大关键挑战:一方面,传统通用操
2025-07-24 10:56:09873 
给大家带来两个机器人的最新消息: 越疆机器人正式发布六足仿生机器狗 7月9日,深圳越疆机器人正式发布六足仿生机器狗,加之此前越疆人形机器人全球量产交付;这意味着越疆成为全球首推“机械臂+人形+六足
2025-07-09 15:03:391927 该设备应用在公共充电场, 汽车产线, 测试设备等需要使用机器人自动取出充电枪, 插入充电车辆, 取出充电枪放回充电桩, 全程自动化,不需要人工干预. 可以对应多种充电枪型号. 在重点充电场企业和车企
2025-07-07 08:47:04
移动抓取等任务。其模块化设计、全开放SDK和6.98万元起定价大幅降低科研门槛,适用于家庭服务、搜救等场景研究,已在全球科研圈引发关注。 灵童机器人推出C端桌面人形机器人,探索情感科技新生态推动AI陪伴机器人市场拓展 灵童机器人推出全球首款
2025-06-16 14:17:24670 近日,知行科技旗下专注机器人研发与商业化的全资子公司艾摩星机器人完成首个具身智能产品 —— “充电机器人”的全链路功能验证。该机器人能够高可靠地完成插枪、充电、拔枪全流程自动化操作。
2025-06-13 16:21:49672 机器人的“姻缘簿”上,它们竟成了最佳“CP”,联手解决设备通信难题。
耐达讯通信技术CC-Link IE基于以太网,擅长快速处理海量数据,就像工业界的“闪电快递员”;DeviceNet网关作为现场总线
2025-06-12 14:35:10
【摘 要】以嵌入式运动控制体系为基础,以移动机器人为研究对象,结合三轮结构轮式移动机器人,对二轮差速驱动转向自主移动机器人运动学和动力学空间模型进行了分析和计算,研究和设计了自主移动机器人电机驱动
2025-06-11 14:30:14
市场的领先地位,也标志着服务机器人在全球范围内的商业化落地步入了全新阶段。 普渡机器人创始人兼CEO张涛表示:“第10万台机器人的正式下线,标志着普渡机器人在全球市场拓展与规模化量产方面迈上了新台阶。我们将持续深化多品类产品
2025-06-11 09:47:20657 
科义机器人是一家机器人研发商,集巡检机器人设计研发、生产制造、解决方案、产品销售为一体。目前我司已规划包括室内外轮式巡检机器人、轨道巡检机器人、高防护机器人、光伏清扫机器人等十个系列机器人。量产后将服务于电力、油气、轨道交通、水务、矿山、养殖、港口、冶金化工等多个行业。
2025-06-10 18:12:06
随着机器人技术的快速迭代升级,协作机器人、复合移动机器人和人形机器人等新兴应用场景对实时控制与智能决策的深度融合提出了迫切需求。然而,当前机器人操作系统架构面临以下关键挑战:算力瓶颈制约智能化发展
2025-06-09 09:23:181387 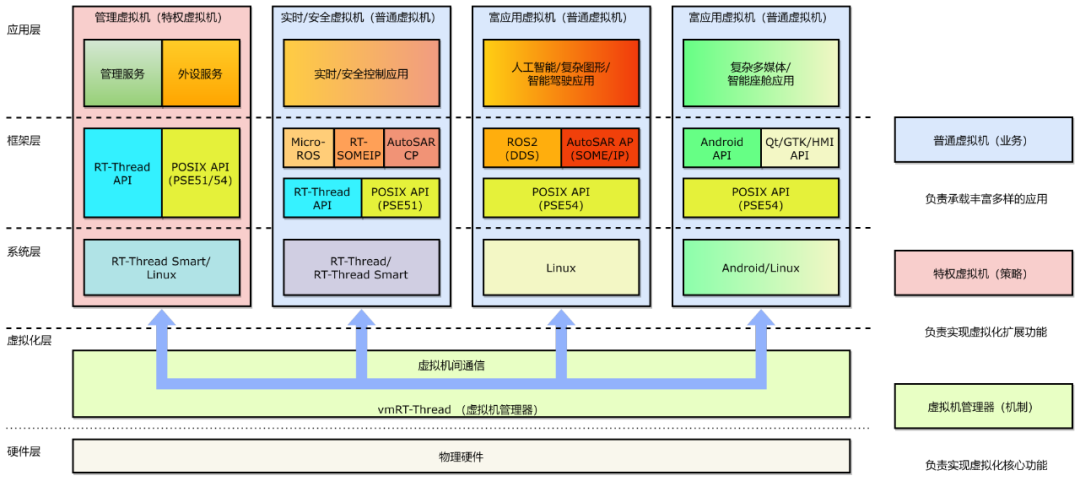
本期 NVIDIA 机器人研究与开发摘要 (R²D²) 将探讨 NVIDIA 研究中心针对机器人装配任务的多种接触密集型操作工作流,以及它们如何解决传统固定自动化在鲁棒性、适应性和可扩展性等方面的关键挑战。
2025-06-04 13:51:05654 
在自动化生产的浪潮中,工业机器人与协作机器人逐渐成为企业提升效率、优化产能的得力助手。但它们并非同一概念,在功能、设计与应用场景上有着显著差异。北京沃华慧通测控有限公司凭借深厚的技术沉淀,为不同需求的企业提供适配的机器人解决方案。
2025-06-03 13:15:30788 
在人工智能快速发展的今天,语音机器人逐渐成为人们生活和工作中的得力助手。明远智睿SSD2351开发板凭借强大性能与丰富功能,为语音机器人的发展注入新动力,成为该领域的变革力量。 SSD2351开发板
2025-05-28 11:36:54
近日,知行科技旗下专注机器人研发及商业化的全资子公司艾摩星机器人与苏州小工匠机器人有限公司(以下简称“小工匠”)签署股权转让框架协议,艾摩星机器人将出资收购小工匠大部分股份,成为控股股东。
2025-05-26 16:44:41870 是具体内容: *附件:白皮书-rzt2h-industrial-robot.pdf 工业机器人发展需求与传统方案问题 发展需求 :随着工厂自动化和省力化需求增长,垂直多关节机器人等工业机器人需求上升。构建此类机器人,开发人员需要具备控制多轴电机的实时性能、与轴数匹配
2025-05-22 10:22:211139 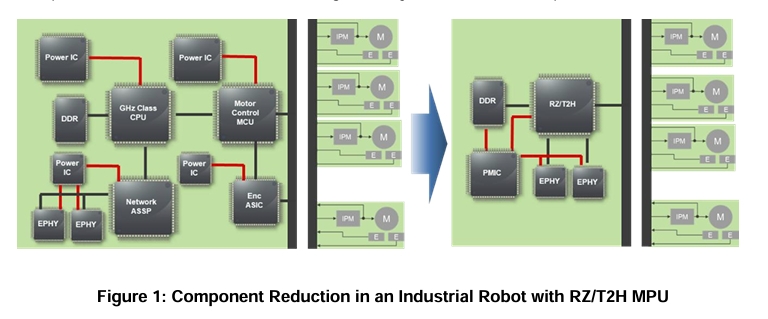
操作系统的实时性赋能东土科技的鸿道(Intewell)工业操作系统作为国内唯一通过汽车、工业控制、医疗、轨道交通四项功能安全认证的系统,为标准体系中的技术层架构提供了底层支持。其微内核虚拟化架构可将人形机器人电子架构成本降低50%、功耗减少60%,并支持算力芯片虚拟化,使大模型运行效率提升40%。
2025-05-16 14:44:20606 地瓜机器人RDK X5开发套件地瓜机器人RDK X5开发套件产品介绍 旭日5芯片10TOPs算力-电子发烧友网机器人开发套件 Kria KR260机器人开发套件 Kria KR260-电子发烧友网
2025-05-13 15:02:04
机场智能指路机器人主要依靠感知系统、定位系统、导航系统、智能交互系统和运动系统协同工作,来实现为旅客准确指路和提供服务的功能,以下是其详细工作原理:
感知系统
传感器类型 :机器人配备了多种传感器
2025-05-10 18:26:31
阅读心得体会:ROS2机器人视觉与地图构建技术
通过对本书第7章(ROS2视觉应用)和第8章(ROS2地图构建)的学习,我对机器人视觉感知和自主导航的核心技术有了更深入的理解。以下是我的心得体会
2025-05-03 19:41:47
ROS的全称:Robot Operating System 机器人操作系统
ROS的 目的 :ROS支持通用库,是通信总线,协调多个传感器
为了解决机器人里各厂商模块不通用的问题,让机器人快速开发
2025-04-30 01:05:09
的机器人气密性测漏仪操作难度并不高。从设计理念上来说,研发者充分考虑到了操作人员的使用体验,尽可能让操作流程简单化、人性化。首先,在仪器的设置方面,现在的机器人气密性
2025-04-27 15:25:42470 
出有用的信息,如障碍物的位置和形状。对于摄像头数据,可以使用 OpenCV 等图像处理库进行图像识别、目标跟踪等操作,为机器人的导航和决策提供支持。
运动控制:运动控制是机器人开发的核心内容之一。书中
2025-04-27 11:24:32
大象机器人成立于2016年,专注协作机器人研发与应用,产品线涵盖轻量级协作机器人、人形机器人、仿生机器人等多种形态。拳头产品myCobot系列以“全球最轻的六轴机械臂”闻名,累计销量超数万台,覆盖
2025-04-25 17:59:18
)、鲁班(ROBAN)、Aelos,大、中、小三款明星机器人产品展开全面合作,共同推进具身智能机器人的国产化进程。作为此次战略合作的第一步,双方在活动上联合推出了Ael
2025-04-24 22:07:381188 
什么是机器人? 我们都知道“机器人”这个词,并在日常对话中随意使用它。但我们知道它真正的含义吗?让我们花点时间来深入研究机器人的定义。它是像看起来那么简单,还是挑战了我们的理解? 在其核心,机器人
2025-04-24 19:21:194308 在智能制造浪潮的推动下,机器人已成为工业升级的核心驱动力。然而,操作系统作为机器人产业的“魂”,直接决定了机器人的智能化水平、协同能力和生态扩展性。长期以来,机器人产业面临生态割裂、技术重复开发
2025-04-19 15:07:191326 GTS机器人位置精度激光跟踪测量仪是高精度、便携式的空间大尺寸坐标测量机。它集激光干涉测距技术、光电检测技术、精密机械技术、计算机及控制技术、现代数值计算理论于一体,主要用于百米大尺度空间三维坐标
2025-04-14 11:00:17
近日,苏州市具身智能机器人产业生态大会召开,据了解,本次大会共征集了84个具身智能机器人产业项目,总投资超160亿元,其中钧舵机器人、法奥机器人、汇川技术、艾利特机器人、阿普奇、慧联达科技等10家企业与苏州市政府进行了项目签约。
2025-04-11 10:16:591266 2025年4月9日,深开鸿在广东省人工智能与机器人产业创新产品与服务新闻发布会上正式发布全国首个基于开源鸿蒙的分布式异构多机协同机器人操作系统——M-RobotsOS(Multi-RobotsOS
2025-04-09 13:00:251191 在工业 4.0 时代,机器人不再是冰冷的机械臂,而是成为与人类协同创造价值的 “智能伙伴”。富唯智能凭借具身智能工业机器人人机交互设计,突破传统操作界面的局限,通过自然语言、手势识别、力控反馈等多模态交互技术,构建了安全、高效、人性化的协作生态,为柔性制造、智慧工厂提供了革命性解决方案。
2025-04-07 15:02:241035 近日,大族机器人在官方渠道发布改名公开信,“深圳市大族机器人有限公司”正式更名为“广东华沿机器人有限公司”(以下简称“华沿机器人”),对应的英语名称为"Guangdong Huayan Robotics Co. Ltd”,本次更名涉及海内外所有业务。
2025-04-02 14:22:473812 机器人激光焊接机:高精度自动化焊接的未来1. 概述机器人激光焊接机是一种集成了工业机器人和激光焊接技术的先进自动化设备,通过高能量密度的激光束实现快速、精准的焊接。该系统结合了机器人的灵活运动
2025-03-28 14:04:12
GTS机器人位姿精度激光跟踪校准仪与空间姿态探头配合,能够根据合作目标的精确空间姿态对被测工件的内部特征、隐藏特征或曲面等复杂特征进行快速、高精度的测量。广泛应用在飞机、汽车、船舶、航天、机器人
2025-03-25 18:10:11
关节机器人领域迎来一位实力选手。继布局移动机器人、机器视觉业务后,海康机器人正在拓展新的产品线。
2025-03-20 10:47:481304 提高产品质量和生产效率。由于机器人能够按照预设的程序进行自动化操作,不会因疲劳而影响工作效率,因此可以实现连续作业,减少人为因素对产品质量的影响,提高生产的稳定性和一致性。此外,机器人工作站还可以通过优化
2025-03-17 14:49:02
电子发烧友网报道(文/莫婷婷)随着全球人口老龄化的加速推进,养老问题日益受到社会各界的关注。在这一背景下,养老机器人作为高科技与人文关怀相结合的产物,正逐渐成为解决养老难题的重要力量。近日,国际电工
2025-03-12 00:09:002445 
,问题也越来越多,为了打造一款能够成为通用机器人标准化软件平台的“操作系统”,ROS 2在2014年第一次被提出,之后推出多个测试版本,并于2017 年年底发布第一个正式版本。
2024年5月ROS 2
2025-03-03 14:18:22
给大家带来一些机器人的消息: 宇树科技王兴兴回上海母校 加速商业化落地 日前,宇树科技创始人王兴兴在接受媒体专访时候,介绍了公司的H1人形机器人的技术亮点及行业前景,H1人形机器人是首款能原地后翻出
2025-02-25 11:26:011829 MJA-H系列轻量化关节模组• 专为轻量型人形机器人手臂应用研发,提供定制化服务• 集谐波减速器、电机、编码器、驱动器于一体• 定位精度高,可靠性稳定性大幅提升• 精巧
2025-02-21 15:04:19
HJR系列带力控旋转关节模组• 专为人形机器人应用研发,提供定制化服务• 集谐波减速器、电机、抱闸、编码器、驱动器、扭矩传感器于一体• 创新的谐波减速器结构,让关节模组整体轻量化程度进一步提升
2025-02-21 14:59:52
HJL系列行星滚柱丝杠线性关节模组• 专为人形机器人应用研发,提供定制化服务• 集行星滚柱丝杠、电机、编码器、拉压力传感器于一体• 强大推力,性能强劲,稳定可靠• 精巧结构设计,整体轻量化程度进一步
2025-02-21 14:55:54
自2月20日起,普渡机器人正式接入DeepSeek满血版模型,机器人智能语音交互能力迎来智能化升级里程碑!此次升级中,首批搭载该模型的贝拉Pro机器人已在部分商超落地测试,后续将逐步推广至其他机型及场景。
2025-02-20 16:50:551387 当冰冷的代码被赋予人性的温度,科技便有了治愈人心的力量。大象机器人公司始终致力于通过机器人技术改善人们的生活,"享受机器人世界"是大象机器人一贯秉持的愿景。 基于这个理念大象机器人推出了米塔星球系列
2025-02-20 11:17:371236 应用于机器人操作。 LimX VGM算法通过利用人类操作视频数据对现有的视频生成大模型进行后训练,实现了对任务理解与拆分、物体操作轨迹生成以及机器人操作执行的全流程自动化。这一过程中,仅需将场景图片和操作任务指令作为提示Prompts,即可实现零真机样本数
2025-02-18 09:26:15914 导读随着工业自动化向智能化发展,机器人与HMI屏的通信变得至关重要。本文将为您介绍一款创新的解决方案,它打破了通信协议的壁垒,实现机器人与HMI屏的无缝连接。随着工业自动化向智能化的迈进,生产制造业
2025-02-17 11:39:29779 
电机、传感器等的工作状态,确保对机器人的整体运行情况有全面的了解。 集中管理 :可以同时对多个机器人进行集中监控和管理。在设备电子地图界面上,管理人员可以方便地切换查看不同机器人的运行状态、位置分布、数量类型、告警频率、
2025-02-14 09:06:34877 人形机器人产业前景广阔 人形机器人指模仿人类外观和行为,具备较高智能化水平的机器人。与传统工业机器人、服务 机器人相比,最大的特点是其与人类相似的“肢体”结构、运动方式和感知方式,并在人工智 能
2025-02-12 09:39:261731 
在现代化生产中,机器人已经成为不可或缺的一部分。它们不仅能够提高生产效率,还能在复杂、危险的环境中完成人工难以完成的任务。然而,机器人的性能稳定性却常常受到各种因素的影响,其中气密性就是一个关键因素
2025-02-08 15:08:43746 
机器人滑环在现代自动化和机器人技术中扮演着至关重要的角色。作为一种关键的机械组件,滑环允许机器人在旋转和移动的过程中保持稳定的电信号和数据传输。波士顿机器人滑环作为行业中的领先产品,具有多项独特的技术特点和优势,为各种机器人系统的高效运作提供了保障。
2025-02-06 17:06:46705 降低了维护和保养的成本。三、适应复杂场景人形机器人的内部结构十分复杂,关节数量多达25-50个,且零部件微型化、类型多、用量大。伺服电动缸的微型化和高精度特性使其能够适应这种人形机器人的特殊需求。通过
2025-02-06 09:04:39
作者:Jeff Shepard 投稿人:DigiKey 北美编辑 机器人和协作机器人 (cobots) 处于工厂自动化技术的前沿。数字双胞胎和虚拟现实 (VR) 技术则处于设计和开发工具的前沿。将
2025-01-25 17:22:001181 
机器人外部感知能力需求提升,传感器为发展重点。人形机器人产业发展速度快,特斯拉Optimus、Figure、优必选等国内外机器人性能持续提升,有望步入量产阶段。对于人形机器人商业化而言,机器人
2025-01-24 11:36:541427 
在巡检领域,传统轮式/轨道巡检机器人功能局限于简单数据采集,且受环境制约严重,如遇障碍便难以为继。而复合巡检操作机器人强势崛起,集多样检测与操作能力于一身,能灵活应对复杂地形,精准完成巡检与应急处置,开启智能巡检新篇章,正重塑行业格局。
2025-01-21 15:19:28994 
日前,海尔兄弟机器人科技(青岛)有限公司(简称“海尔兄弟机器人”)成立,法定代表人为丁来国,注册资本为1000万元,经营范围包含智能机器人销售;工业机器人销售;特殊作业机器人制造;工业机器人安装、维修;服务消费机器人制造;服务消费机器人销售;工业机器人制造;智能机器人的研发等。
2025-01-20 11:19:492651 和大负载四轮八驱轮式移动平台等模块化设计,使其能够灵活应对各种复杂和危险的工业场景。其双臂设计使得机器人能够执行多种接触式作业任务,大大扩展了其应用范围。 该机器人不仅具备出色的移动能力和作业灵活性,还具备防爆功能
2025-01-17 10:18:541656
 电子发烧友App
电子发烧友App








 工商网监
工商网监
评论