 时识科技类脑视触觉方案破解机器人灵巧操作难题
时识科技类脑视触觉方案破解机器人灵巧操作难题

当前,机器人要实现如人类般灵巧的操作,其触觉感知系统正面临三大核心瓶颈:功耗高导致续航受限,数据量大引发延迟响应,以及系统复杂制约集成部署。这些因素共同限制了机器人在精细操作、人机安全交互等场景下的应用深度与广度。
一项发布于arXiv的研究显示,采用时识科技(SynSense)Speck感算一体SoC的类脑视触觉方案,在关键性能上实现了跨越式突破。该方案在滑觉与纹理检测任务中平均功耗仅6.53毫瓦,其推理能效相较传统CPU与GPU架构,更是实现了超10,000倍与2,500倍的提升。
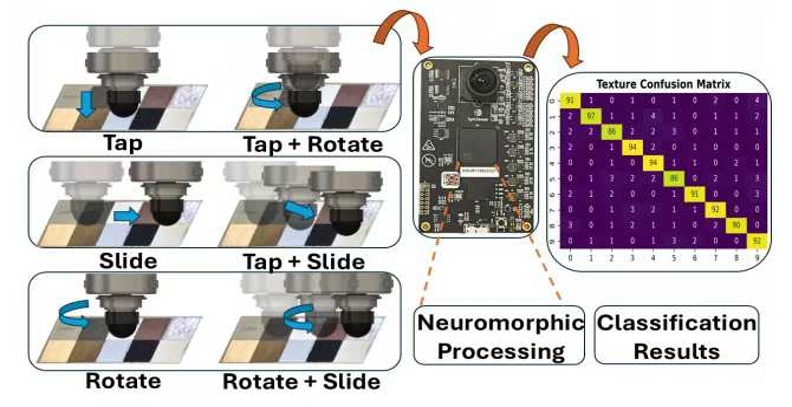
图片来源:论文Exploratory Movement Strategies for Texture Discrimination with a Neuromorphic Tactile Sensor
从“耗能”到“能效”
类脑方案的底层革新
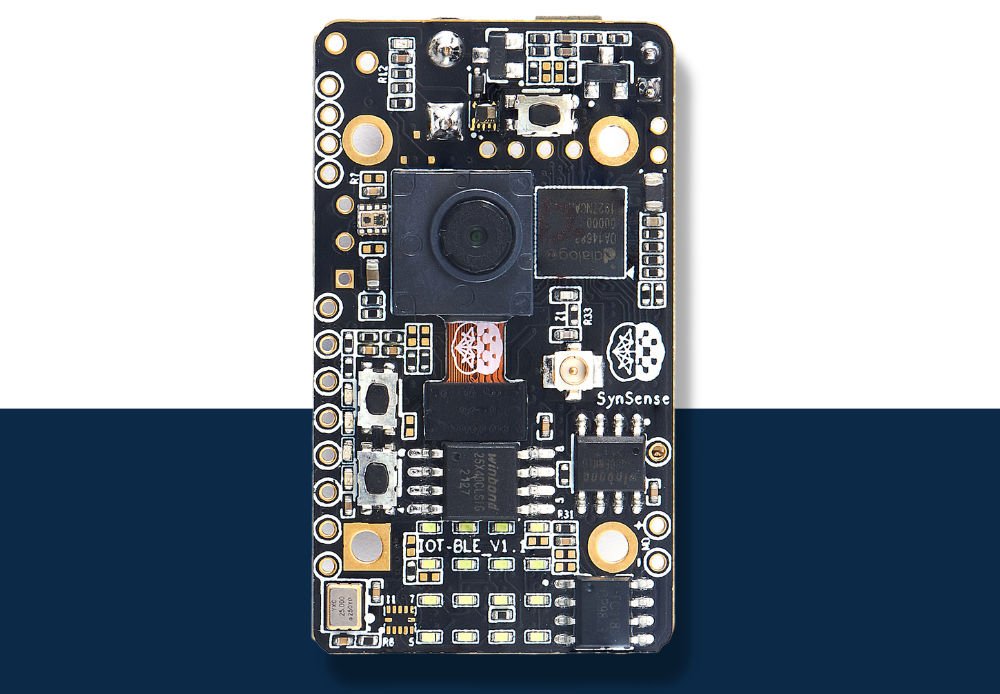
Speck感算一体SoC
时识科技(SynSense)类脑方案的优势源于其根本性的设计范式变革。与传统方案持续采集、集中处理海量数据不同,Speck采用“事件驱动”与“感算一体”架构。这意味着芯片仅在感知到动态变化时(即“事件”)才进行稀疏计算,从源头避免了冗余数据处理。其高度集成的设计将视觉传感器与脉冲神经网络处理器紧密结合,极大减少了数据搬运带来的功耗和延迟。
因此,与传统方案相比,Speck在满足实时处理的条件下,算力需求可降至传统方案的0.1%-1%,能耗更是降低了2-3个数量级。这种“超低功耗+毫秒级延迟”的特性,使得机器人有望摆脱线缆束缚,在复杂环境中实现长期、灵敏的触觉交互成为可能。
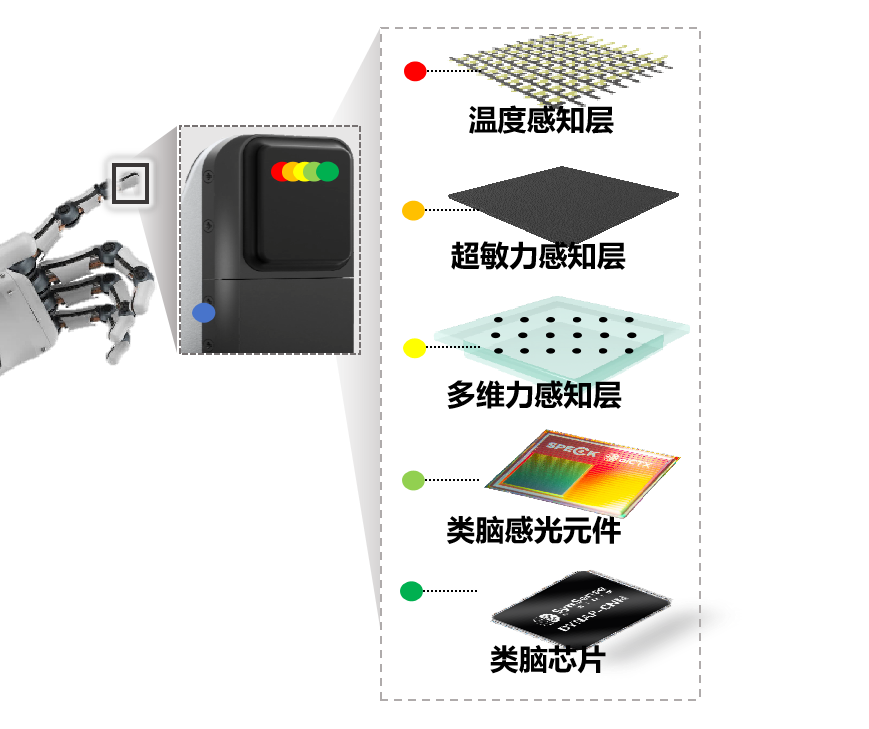
机器人视触觉方案示意图
迈向产业共赢:以类脑解决方案
共解实际场景难题
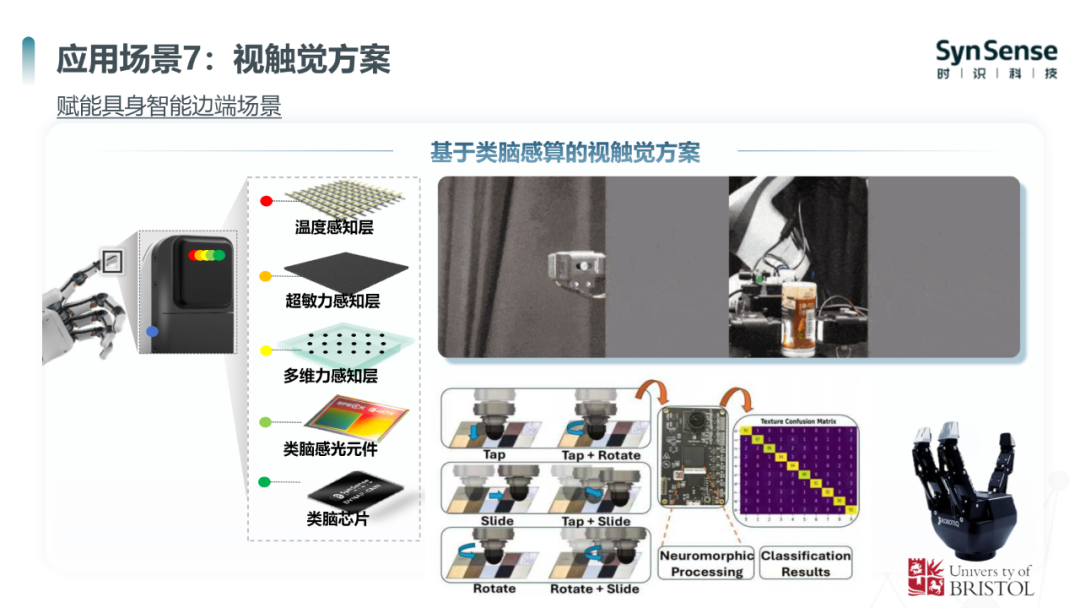
时识科技(SynSense)视触觉方案
类脑视触觉技术的可行性已得到初步验证,但其巨大潜力有待与产业界、学术界共同挖掘。时识科技(SynSense)已在此方向深度布局,不仅持续迭代Speck等核心芯片,还吸引了国际知名科学家Yulia Sandamirskaya教授加入,主导前沿的脉冲神经网络触觉感知研究。同时,布里斯托大学也正在利用Speck芯片开展触觉传感技术的研发工作。
在机器人灵巧操作、精密制造中的微米级检测、智能假肢的真实触感反馈等前沿领域,传统的感知与计算方案正面临功耗、延迟与集成度的实际瓶颈。时识科技基于Speck等感算一体类脑芯片,已推出可直接集成或二次开发的成熟模组与解决方案,其毫瓦级超低功耗与毫秒级实时响应的特性,为上述高要求场景提供了切实可行的技术。
时识科技(SynSense)可提供:
类脑芯片:提供包括感算一体动态视觉智能SoC(如Speck系列)和低维信号通用类脑处理器(如Xylo系列)在内的多款核心芯片,涵盖视觉、声音、动态等多模态感知计算场景
核心模组:提供已通过性能验证的类脑感知与计算硬件模组,助力合作伙伴快速集成,显著降低功耗与延迟,加速产品智能化升级
行业方案定制:针对特定场景需求(如工业产线上的高速瑕疵检测、微型设备高性能控制、假肢的自适应抓握控制等),联合开发定制化的类脑感知算法与嵌入式系统
联合项目攻关:积极参与并支持您申报省部级或国家级研发计划,共同攻克产业关键共性技术难题,推动类脑智能在重点领域的规模化落地
我们相信,类脑技术的产业化是一场需要产业链上下游紧密协作的“长征”。时识科技(SynSense)致力于成为您可靠的技术合伙人,通过持续的技术迭代与场景验证,共同将类脑智能的潜力转化为提升产品竞争力、开拓新市场的强劲动能。
-
机器人
+关注
关注
214文章
31691浏览量
224633 -
时识科技
+关注
关注
0文章
59浏览量
4947
原文标题:类脑视触觉:破解机器人灵巧操作瓶颈的新路径已验证
文章出处:【微信号:SynSense时识科技,微信公众号:SynSense时识科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
灵巧手触觉感知技术深度报告:从“单点感知”到“触觉成像”

六维力传感器:当机器人拥有“真实触觉”,未来会发生什么?
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
超越人手的 “科技之手”:强脑科技 Revo3 重新定义灵巧边界
空心杯电机,为何成为人形机器人灵巧手的 “香饽饽”?

从概念到落地:灵巧手为何是人形机器人产业化的决胜环节?
时识科技在类脑与脑机接口领域实现重要突破
【案例分享】电子谷定制通讯线束:人形机器人稳定律动连接方案

如何利用NVIDIA Cosmos Cookbook提升机器人操作能力
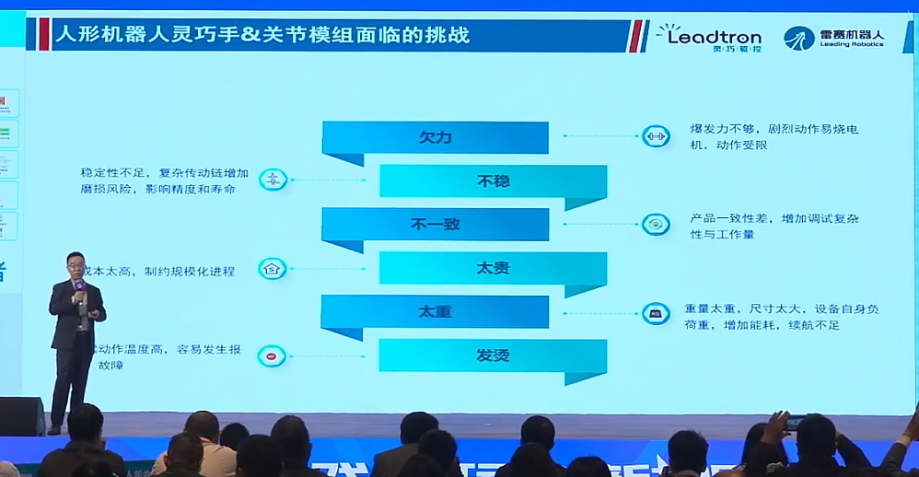
人形机器人市场火爆!雷赛智能重磅推出“20自由度”灵巧手方案
国际类脑计算科学家Yulia Sandamirskaya教授加盟时识科技
我国发布全球首款轻量化重载机器人仿生灵巧手




评论