 机器人时间缩放法原理
机器人时间缩放法原理

时间缩放法的初衷是用于修改轨迹,避免轨迹违反系统饱和约束限制的,我们先阐述其原理,然后将其用于实现速度曲线时间同步。
在一些应用场景中需要考虑驱动系统的饱和限制约束,为了保证规划的期望轨迹不违反此类饱和限制,必须对原始的轨迹进行修改。
由于那些运动速度、加速度和力矩超过允许范围的运动轨迹在实际中无法执行,因此此类运动轨迹在实际工程中应予以避免。实际中可以将饱和区分为如下两类。
(1)运动学饱和:规划后轨迹的速度或加速度超过了驱动系统所能实现的临界速度或临界加速度。
(2)动力学饱和:此列饱和发生于驱动系统所需的驱动力矩(超过驱动系统所能提供的临界力矩)不可行的情形。
特别地,由于多机械系统动力学的非线性耦合性,动力学饱和现象往往出现于此类多轴机械系统(如工业机器人)中。
如果在轨迹规划阶段并未提前考虑上述运动学饱和及动力学饱和限制,那么有必要在系统跟踪运动轨迹之前验证运动轨迹的可行性,并采取必要措施(如增加轨迹的时间长度)来防止违反上述饱和限制。
首先,给定一条轨迹:
q=q(t)
接下来引入一个新的与时间t有关的时间变量′t′ 可使得上面轨迹变快或变慢,或者更一般地,可以修改轨迹的速度和加速度等,其中 t和
′t′之间具有如下严格的函数关系:

为了简便起见,上述关系可以重新写成如下形式:


声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
30600浏览量
219655 -
轨迹
+关注
关注
0文章
46浏览量
9562 -
机械系统
+关注
关注
0文章
67浏览量
9993
发布评论请先 登录
相关推荐
热点推荐
机器人时代将来临,谁的饭碗已“告急”?
人工智能技术、大数据技术和云计算技术正在争取突破,在刚刚过去的2016中国机器人大赛上,汇聚了国内外100余家知名机器人及智能装备企业和国内1200个机器人团队,奇思妙想的激烈碰撞,越来越多的
发表于 11-01 10:08
•612次阅读
机器人时代到来临——操控人才在何方?
机器人相关技术人才缺口超过2000人。看到这个数据,倪炬就忍不住想“感言”:机器人时代来了,我们的时代,也来了! 但是,巨大的人才缺口谁来弥补?如何弥补?很多高职院校已经跃跃欲试,甚至联合成立了全国工业
发表于 03-02 11:21
机器人与未来
刘***:欢迎来到未来机器人的世界,在这里一些关于机器人及未来的传统认识将被颠覆。创造机器人曾是我们儿时的梦想,从敲打简陋的铁皮机器人,到憧憬科幻小电影里的超酷
发表于 12-29 14:56
华硕Zenbo,机器人时代来了?
可爱的机器人。其流畅的语言,丰富的表情,智能的对话,而且还能跟着人走动,就像家里的宠物,迅速的引起了社会各界对服务型机器人的关注。 笔者不禁要问机器人时代就要来临了么?这么酷炫,这么科幻
发表于 06-06 21:10
身处“机器人时代”,我们该如何相处?
。 虽然机器人已经主导了互联网流量,但这可能只是“机器人时代”的开始。马云说,“在过去的二三十年,我们把人变成了机器,在流水线上特别明显;未来的二三十年我们将会把机器人变成人,
发表于 06-20 15:18
选购工业机器人要了解哪些技术参数?
现如今工业机器人的种类非常多,从材料搬运到机器维护,从焊接到切割。工业机器人制造商开发了适用于各种应用的机器人产品。由于种类繁多,很多客户购买工业机
发表于 08-26 10:37
已开奖——【送书福利】机器人时代已来!送你几本机器人学硬核好书
`21世纪是机器人的时代。从学术研究到工程应用,机器人引起了学界和工业界越来越多的关注和兴趣。这种日益浓厚的兴趣也来源于机器人学作为一门综合性学科的多学科交叉特征,后者是创新的源泉,给社会发展带来
发表于 11-16 16:14
SCARA工业机器人相关资料推荐
ZNL-406SCARA工业机器人一、概述ZNL-406SCARA工业机器人可以在高速运行时承担较高负载,非常适用于需要更大工作范围或更高有效负载同时拥高速度、低价格的应用。机器人时重物取放、包装
发表于 07-01 09:49
abb机器人电源模块短路板短路故障处理
使用机器人时间的增长,机器人电路板上的元器件就会自然老化,从而导致机器人电路板故障。环境因素:由于操作者的保养不当,机器人电路板上弥漫了灰尘,可以造成信号短路。其他因素:静电也常造成
发表于 09-17 07:33
机器人时代已正式到来
你是否为每天重复的工作而烦恼, 你是否在为了一件事排队等候浪费大量时间, 你是否很多时候想解放双手干自己感兴趣的事,那么机器人时代来了,你可以想象的都可以替你办到。
发表于 07-18 08:55
•3027次阅读
智能机器人时代哪些工作处于危险之中?
近年来,智能机器人作为未来的重要发展方向,是当之无愧的主角。从人们的日常生活到产品生产再到智能制造,都有智能机器人应用场景。但是在智能机器人时代,哪些工作处于危险之中?这是一个值得讨论和关注的社会问题。
机器人时代:机器人市场增加,人类未来终将会与各种机器人共存!
技术变革之快,总是超乎保守者的想象。 在许多人的直觉里,过去几年,当科技媒体在向大众描绘机器人时代的恢弘蓝图时,还仿佛是在谈论未来一隅,但忽如一夜,人们就已能清晰听到机器人技术落地的声音。 能自己
服务机器人时代,真的要到来了吗
机器人时代真的到来了吗? 根据IFR统计,2016年以来,我国服务机器人市场规模年平均增长率达到27.5%,2021年更是预计达到302.6亿元,可以说增速明显,然而事实上,在科技媒体不断宣扬机器人时代已经到来时,目前商用服务
焊接机器人编程方法及流程技巧
焊接机器人编程方法有什么?所谓焊接机器人是从事焊接的工业机器人,广泛应用于汽车制造、造船、航空等领域。使用机器人时,首先要做好编程,使机器人
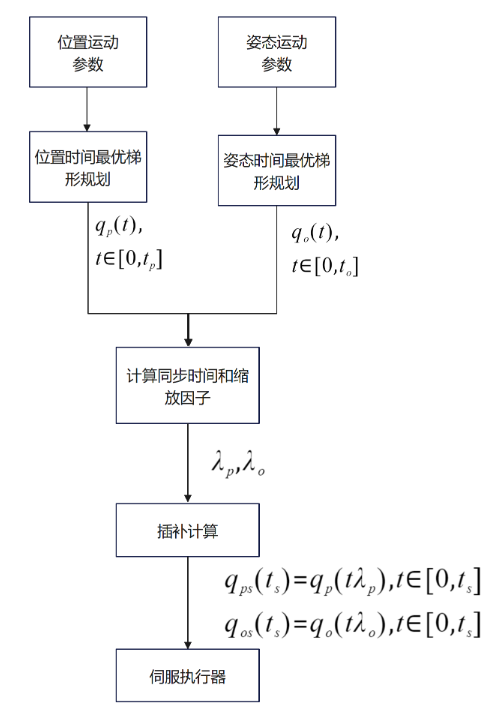
机器人梯形加减速轨迹时间缩放
基于上面的原理,不管是q(t)是何种加减速算法生成,都可以使用上面的时间缩放法进行时间同步,下面以梯形减速为例进行说明,流程如下图所示。 从流程图中可以看出,只需在插补环节对





 工商网监
工商网监
评论