 单关节机械臂接触力补偿因素
单关节机械臂接触力补偿因素

接触力估计需要考虑多个因素进行补偿,以提高估计的准确性。以下是一些常见的补偿因素:
1.重力补偿:机械臂在接触过程中会受到重力的影响,因此需要对测量到的力进行重力补偿。通过减去机械臂当前位置的重力分量,可以获得实际的接触力。
2.惯性补偿:机械臂在运动过程中可能会产生惯性力,这些力会影响接触力的测量。通过考虑机械臂的加速度和速度信息,可以进行惯性补偿,以消除不必要的测量误差。
3.摩擦补偿:在接触过程中,摩擦力会干扰力的测量。通过估计和补偿摩擦力,可以得到更准确的接触力信息。
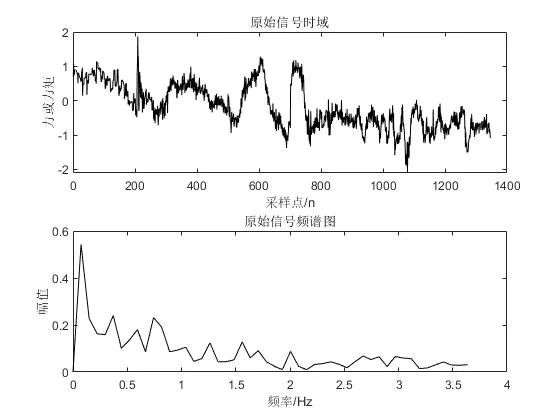
4.噪声补偿:传感器可能会受到环境噪声的影响,这些噪声会对接触力的测量结果产生干扰。使用滤波技术或噪声模型,可以对传感器数据进行滤波或去噪,以减小噪声对接触力估计的影响。
以上是一些常见的补偿因素,具体的实现方法会根据机械臂和传感器的特性而有所不同。
在接触力估计的实际应用中,还需要考虑到系统的动态特性、传感器的校准和精度等因素,以获得更精确和可靠的接触力估计结果。
数据分析:对采集到的数据进行分析,以确定需要进行的补偿方案。以下是一些分析方法和指标:
重力补偿:分析机械臂在不同位置和姿态下的重力分量,计算出重力对接触力的影响。可以通过测量机械臂的姿态角度和质量分布等信息来估计重力分量。
惯性补偿:分析机械臂在不同加速度和速度下的惯性力,计算出惯性力对接触力的影响。可以通过测量机械臂的加速度和速度,结合机械臂的惯性参数来估计惯性力。
摩擦补偿:分析机械臂在接触过程中的摩擦力特性,计算出摩擦力对接触力的影响。可以通过测量机械臂的运动阻力和摩擦系数等信息来估计摩擦力。
噪声补偿:分析传感器输出的噪声特性,确定噪声对接触力估计的影响程度。可以通过统计分析、滤波技术或噪声模型来进行噪声补偿。
在只有角编码器和单轴力矩传感器的情况下,可以通过以下方式进行接触力估计的补偿:
1.重力补偿:
角编码器测量角度:使用角编码器测量机械臂关节的角度。根据角度和机械臂的几何结构,可以估计出机械臂在不同位置和姿态下的重力分量。
机械臂质量估计:通过对机械臂的质量进行测量或估计,结合机械臂几何结构,可以估计出机械臂的质量分布。根据质量分布和重力加速度的方向,可以计算出不同位置和姿态下的重力对接触力的影响。
2.惯性补偿:
角编码器测量角速度:利用角编码器测量机械臂关节的角速度。通过积分角速度,可以获得机械臂的角度变化。结合机械臂的惯性参数,可以估计机械臂在不同加速度和速度下的惯性力。
3.摩擦补偿:
力矩传感器测量力矩:使用单轴力矩传感器测量机械臂关节的力矩。根据关节力矩和摩擦系数,可以估计机械臂在接触过程中的摩擦力特性。
4.噪声补偿:
滤波技术:对传感器输出的接触力数据进行滤波处理,以减小噪声的影响。可以使用数字滤波器,例如低通滤波器或卡尔曼滤波器等,来抑制高频噪声成分。
校准和校正:对传感器进行校准和校正,以降低系统误差和噪声。可以使用校准算法和技术,例如零偏校准和灵敏度校准,来提高传感器的准确性。
-
传感器
+关注
关注
2578文章
55811浏览量
795389 -
机器人
+关注
关注
214文章
31633浏览量
224474 -
机械臂
+关注
关注
14文章
606浏览量
26224
发布评论请先 登录
做毕设,需要用2812控制由舵机组成的三关节机械臂,求助
机械臂的控制学习
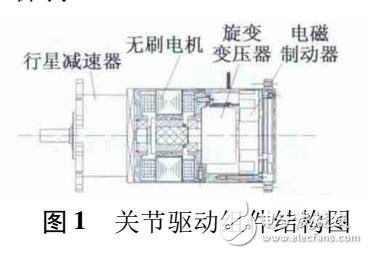
机械臂关节驱动组件
软固结磨粒群接触力分析
机械臂动力学模型学习

Mycobot机械臂各关节的运动(三)
力控机器人接触力滤波与估计
如何实现对机器人接触力的数据滤波
接触力对120A250A大电流接线端子有哪些影响




评论