 KUKAC2机器人ESC的电器连接
KUKAC2机器人ESC的电器连接


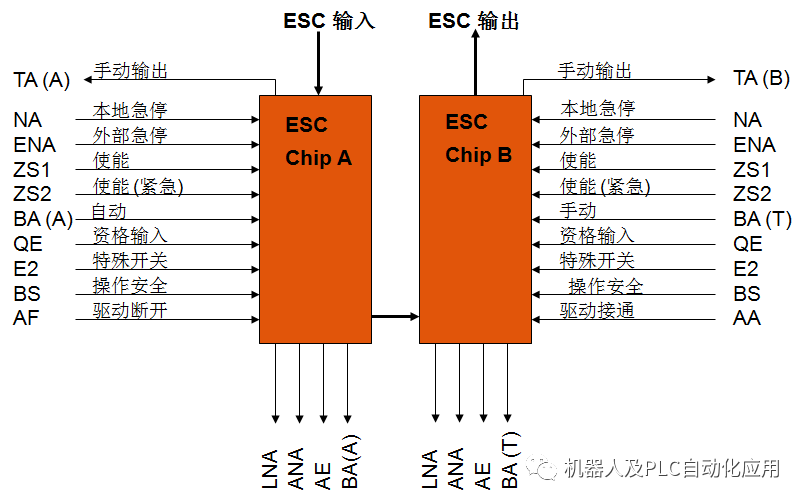
故障安全输入
NA - 本地急停
ENA - 外部急停
ZS1 - 使能输入
ZS2 - 使能, 紧急位置
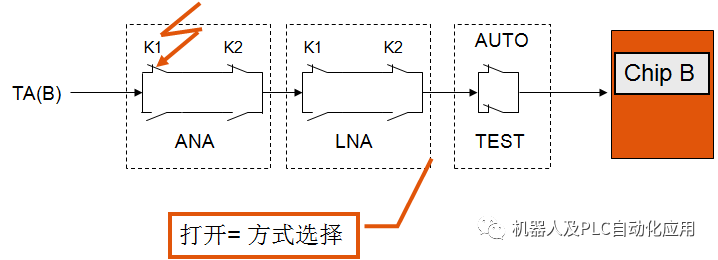
BA - 操作方式 (手动/自动)
QE - 资格输入 (装载位置, 范围限制)
BS - 操作安全输入 (安全门)
控制器输出
AA - 驱动接通
AF - 驱动断开
故障安全输出
AE - 驱动接通(驱动接触器)
LNA - 外部急停
ANA -系统急停
BA - 操作方式 (手动/自动)
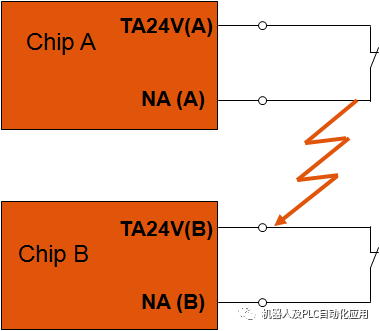
·输入信号两个通道的短路
·输入信号的一个通道和电源短路
·通讯错误 (例如:安全总线中断)
·硬件错误 (例如:检测输出继电器触点损坏)
·ESC 芯片损坏
ESC 节点结构
软件和硬件安全功能
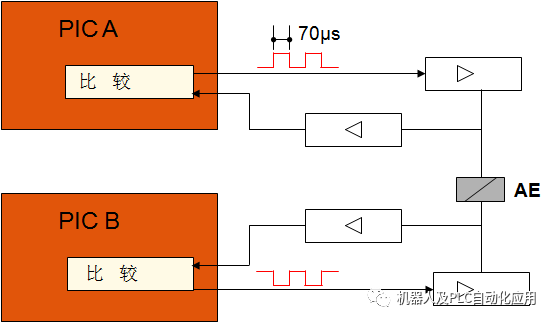
每个PIC发送一个脉冲给输出并比较这个脉冲的返回信号
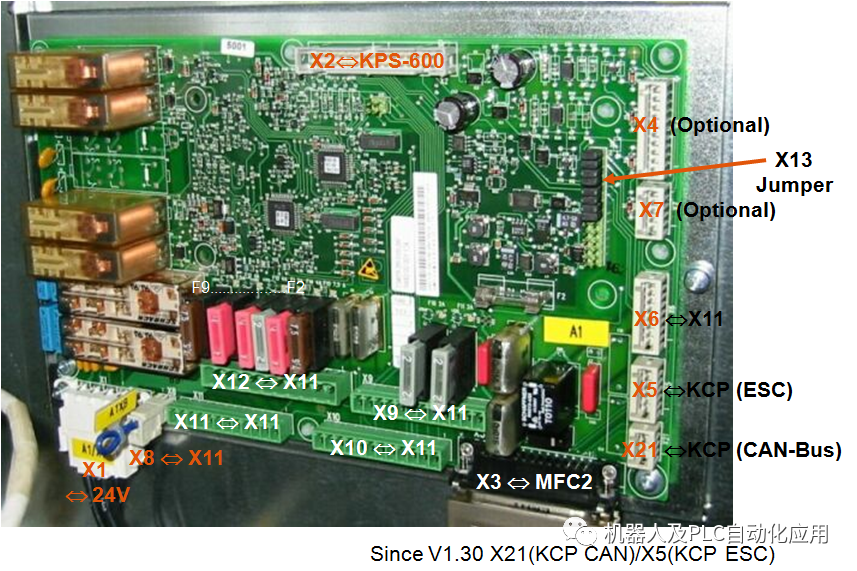
F10: Fks2A Vcc-Esc
F11: Fks2AVcc-Esc
F12: Fks4A 外围接口 Vcc
F13: Fks4A 外围接口 Vcc
F16: Fks7.5A 外围接口 Vcc
F14: Fks4A 驱动接通
F15: Fks7.5A 驱动接通
F1: Fks2 A 驱动接通
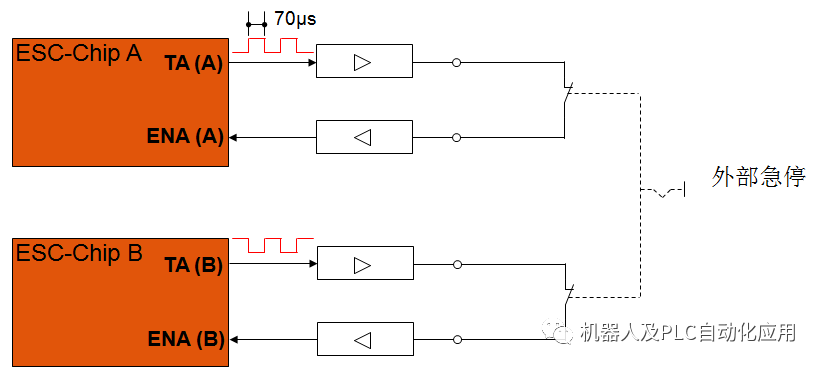
ESC-错误识别
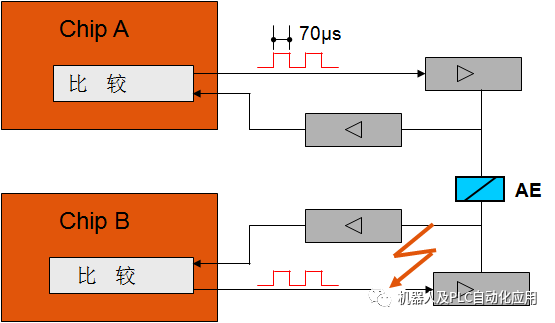
每个芯片传一个脉冲给他的输出,并且用这个样本比较传导的信号不一致的输出定位安全状态.
AE LNA ANA
循环1 10 1
循环2 01 0
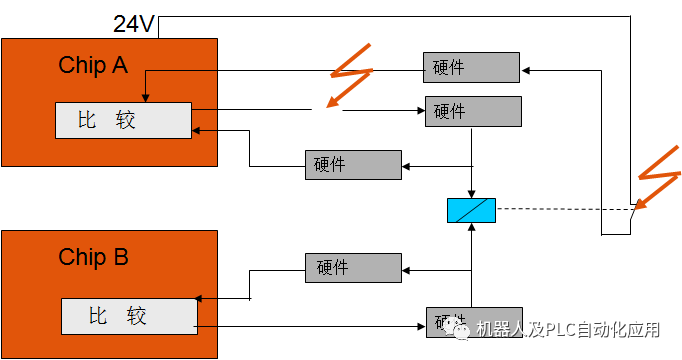
每个芯片比较输出信号和返回信号.不一致的输出定位安全状态.
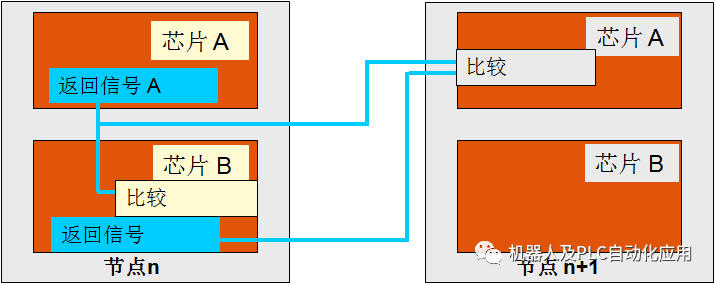
芯片 B 比较 A和 B 自己节点的文本文件
芯片 A 比较 A 和 B上一个节点的文本文件
不一致的输出设为安全状态.
-
机器人
+关注
关注
213文章
31432浏览量
223609 -
驱动
+关注
关注
12文章
1990浏览量
88698 -
ESC
+关注
关注
0文章
63浏览量
18209
原文标题:KUKAC2机器人ESC(安全回路板)的电器连接
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
人形机器人连接器标准制定背后:步步精科技的技术实力解析

在 VisionFive 2 上实现机器人伺服控制
再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
探索RISC-V在机器人领域的潜力
永贵电器与智元机器人达成深度战略合作
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
小萝卜机器人的故事
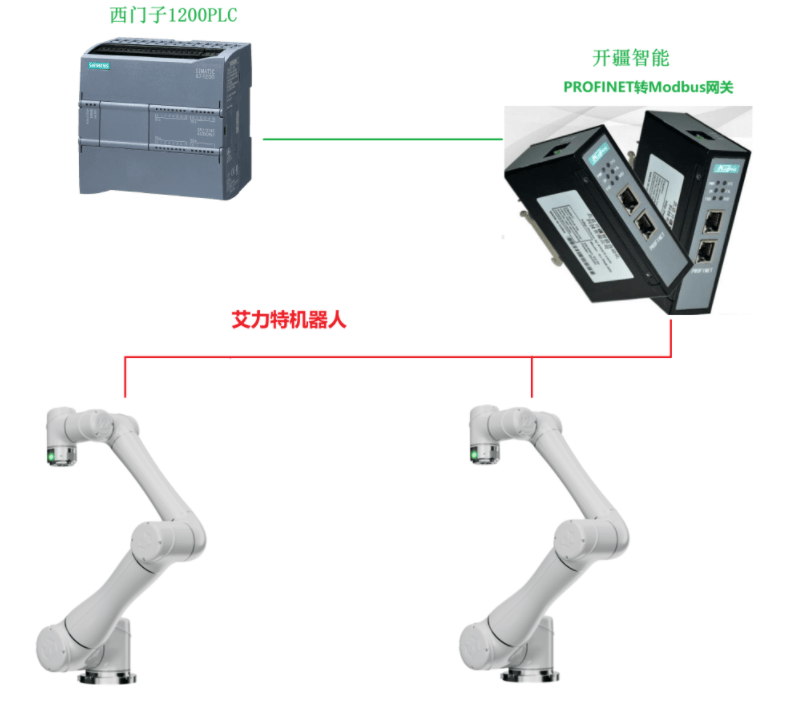
开疆智能Profinet转ModbusTCP网关连接艾力特机器人配置案例



评论