 KUKA机器人视觉抓取的工作原理及Ethernet KRL软件控制讲解
KUKA机器人视觉抓取的工作原理及Ethernet KRL软件控制讲解

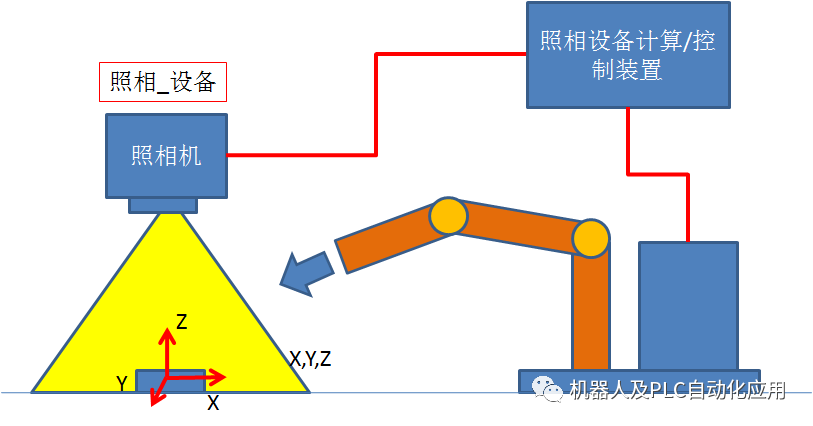
视觉抓取主要是通过改变机器人的TOOL坐标系或BASE坐标系来实现的.
物体位置的变化主要是它位置的X,Y,Z 方向的变化.
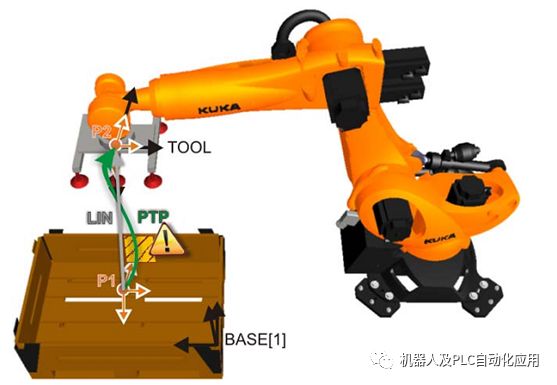
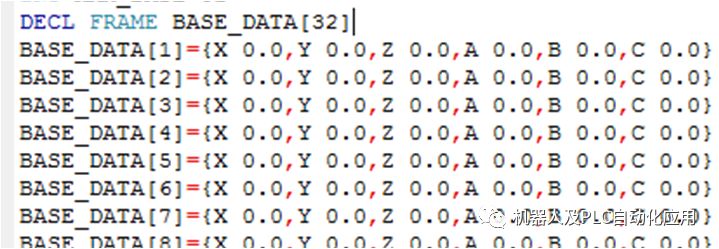
BASE坐标系:可根据需要定义用户坐标系。 当机器人配备多个工作台时,选择用户坐标系可使操作更为简单 。在用户坐标系中, TCP 点将沿用户自定义的坐标轴方向运动。
以改变BASE 坐标系为例:
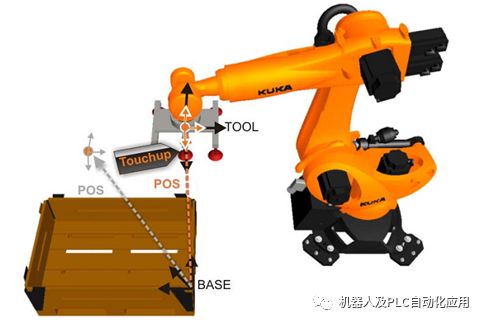
KUKAC4 现在可以使用32个BASE 坐标系
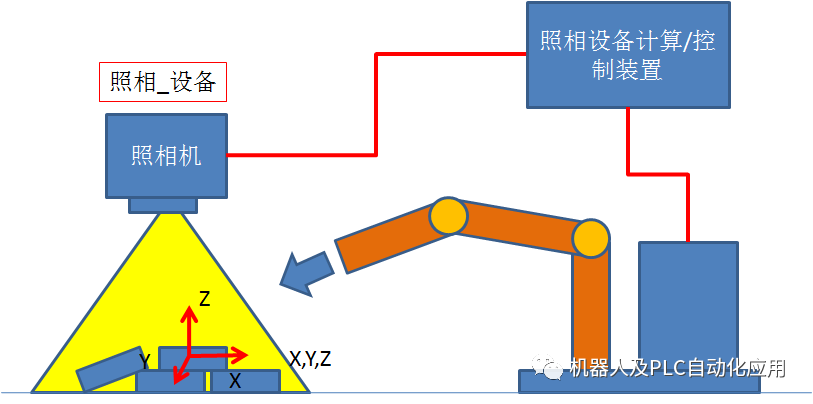
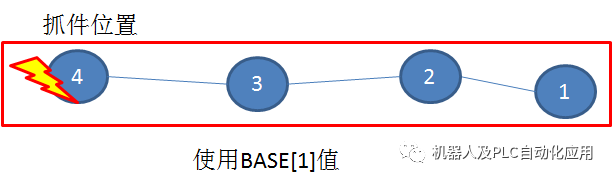
没有使用视觉补偿功能时,只用一个BASE坐标系.
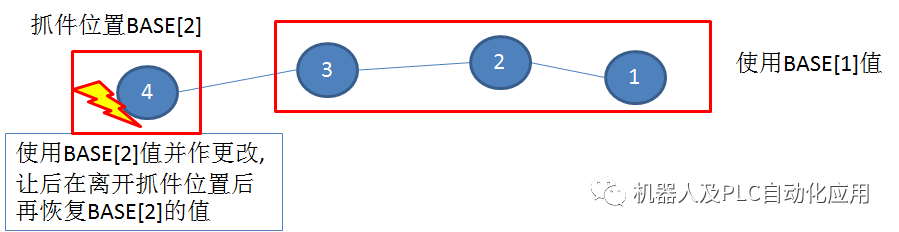
改变机器人BASE坐标系值从而改变机器人抓件位置,使用多个坐标系.
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
31494浏览量
223772 -
视觉
+关注
关注
1文章
183浏览量
24877 -
KUKA机器人
+关注
关注
4文章
144浏览量
10108
原文标题:KUKA 机器人视觉抓取的工作原理及Ethernet KRL软件控制讲解
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
机器人主控核心板米尔RK3576 + ROS2,NPU加速实现目标跟随与机械臂抓取
可达15~20 FPS;
CPU占用大幅降低 :NPU独立处理视觉任务,CPU可专注ROS2通信与运动控制;
功耗更低 ,适合嵌入式移动机器人。
3.2 模型转换与部署流程
1.模型转换:下载
发表于 04-10 21:23
双芯光缆在机器人控制中的应用案例
。 案例一:工业机器人视觉系统的高速图像传输 场景需求: 在汽车制造、电子装配等工业场景中,机器人需通过视觉系统实时识别工件位置、姿态及缺陷,指导机械臂完成高精度操作(如焊接、
解锁“试管自动抓取搬运”新纪元:富唯智能复合机器人重塑精准物流
在工业自动化的浪潮中,如何高效、精准地完成如“试管自动抓取搬运”这类高要求的物料处理任务,成为许多行业迈向智能化升级的关键挑战。富唯智能推出的复合机器人解决方案,正以其高度集成、灵活部署与智能控制

如何使用机器人分析仪EtherCAT-Analyzer抓取主从站数据?
EtherCAT总线在机器人控制总线里占据重要地位。这次,我们搭建了包含EtherCAT主从站和分析仪的完整环境,用机器人分析仪EtherCAT-Analyzer实际抓取主从站之间的通

高精度机器人控制的核心——基于 MYD-LT536 开发板的精密运动控制方案
处理器,支持 1.8 GHz 主频,并集成2Tops NPU、G2D、VPU 4K高清视频编解码器,为复杂控制算法与视觉融合计算提供充足算力。米尔MYD-LT536开发板
在“高精度机器人控
发表于 11-14 15:48
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
瑞芯微RK3576 AIoT处理器处理器凭借其卓越的多屏异显与8路摄像头接入能力,为机器人领域带来革新。米尔电子MYD-LR3576开发板实测数据显示,在高负载下CPU占用仅34%,完美实现多路视觉
发表于 10-29 16:41
15分钟快速部署,复合机器人如何重塑“上下料机器人哪家好”的行业答案
富唯智能复合机器人突破传统技术边界,将协作机器人、移动机器人及视觉引导技术深度融合。其搭载的ICD系列核心控制器,实现了对整个系统的一体化

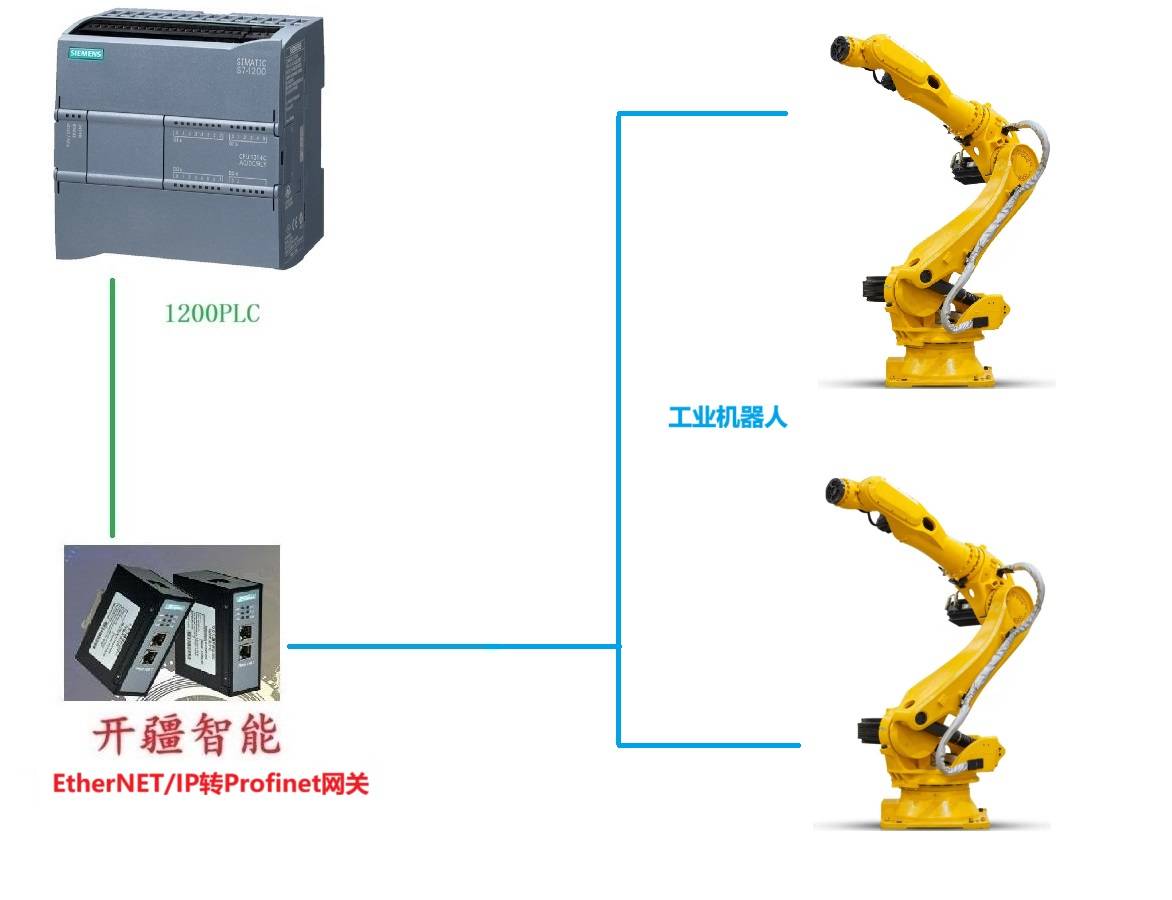
开疆智能Profinet转EtherNET/IP网关连接机器人配置案例
本案例是通过网关将EtherNET通讯协议的机器人接入到西门子Profinet网络之中,以便于PLC可以对机器人可以进行读写控制。 配置过程: 设置
机器人关节模组:类型、设计、工作原理及应用
机器人关节模组是一种用于驱动机器人关节转动、轮子旋转或控制夹爪运动的装置。根据负载需求,机器人关节模组有多种类型。负载通常涉及扭矩、精度、操作速度、功耗等因素。

机器人竞技幕后:磁传感器芯片激活 “精准感知力”
2025 世界人形机器人运动会于 8 月 17 日圆满收官,赛场上机器人在跑步、跳跃、抓取等项目中的精彩表现,背后是运动控制、环境感知等技术的迭代升级。而在这些技术中,磁传感器芯片凭借
发表于 08-26 10:02
工业机器人的特点
生产可以提高产品品质。通过设定相同的程序,机器人可实现重复操作,保证了产品的标准化;在精细化生产方面,工业机器人可实现低于0.1毫米的运动精度,可以完成精细的雕刻工作。提高产出
由于机器人
发表于 07-26 11:22
跨协议探秘:profinet转ethernet ip网关搞定川崎机器人与PLC通信
在工业自动化场景中,不同品牌的设备往往采用不同的通信协议,例如西门子PLC通常使用 PROFINET ,而川崎机器人则可能采用 Ethernet/IP 。要让它们实现数据交互,通常需要借助

详细介绍机场智能指路机器人的工作原理
机场智能指路机器人主要依靠感知系统、定位系统、导航系统、智能交互系统和运动系统协同工作,来实现为旅客准确指路和提供服务的功能,以下是其详细工作原理:
感知系统
传感器类型 :机器人配备
发表于 05-10 18:26
【「# ROS 2智能机器人开发实践」阅读体验】视觉实现的基础算法的应用
阅读心得体会:ROS2机器人视觉与地图构建技术
通过对本书第7章(ROS2视觉应用)和第8章(ROS2地图构建)的学习,我对机器人视觉感知和
发表于 05-03 19:41



评论