 激光雷达领域的新秀利器—SPAD23
激光雷达领域的新秀利器—SPAD23

激光雷达(LiDAR)技术以其精准的距离测量和三维建模成像能力,在多个行业中发挥着重要作用。这项技术主要通过发射激光脉冲并测量这些脉冲与物体碰撞后返回的时间来工作,从而获得高精度的空间数据。不仅能够进行测距还能进行复杂场景的计算成像等等。
激光雷达技术已广泛应用于以下行业:地理空间测绘、考古学、自动驾驶车辆、农业、林业管理、城市规划、灾害管理、建筑和建筑管理、交互式媒体和艺术、太阳能和风能项目、军事和国防、矿业和地质学、基础设施和建设、大气研究、机器人技术、制造业、能源行业等等
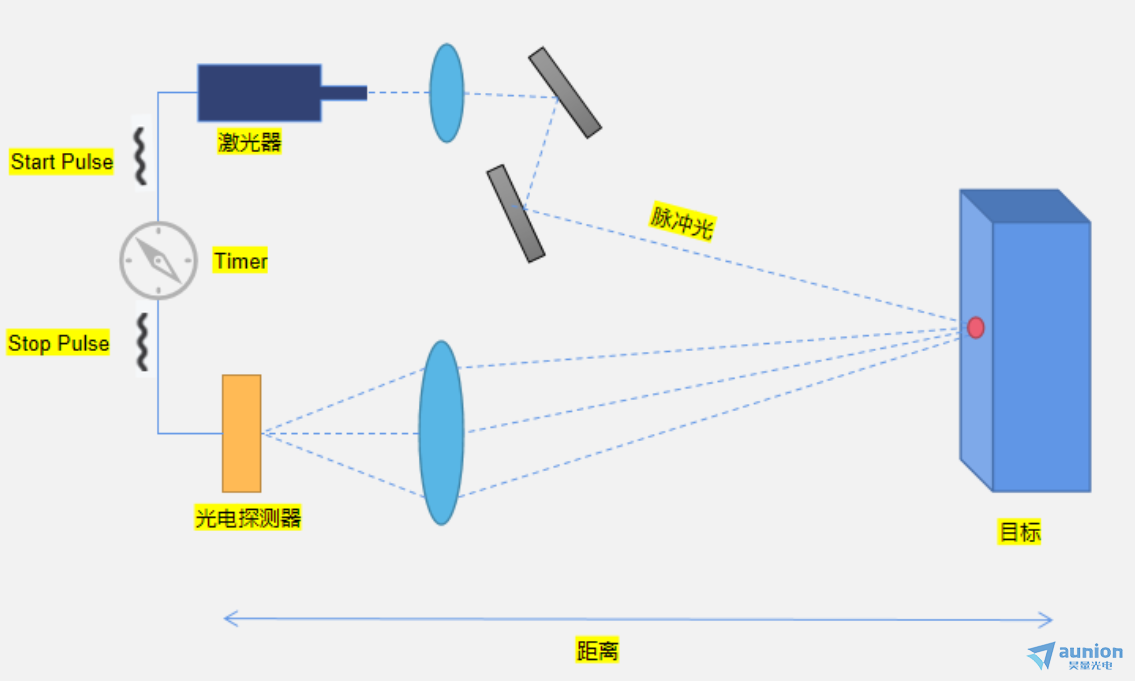
时间飞行(ToF)技术是一种测量物体距离的方法,它通过计算光波从发射到反射回传感器所需的时间来确定空间信息。ToF系统通常包括发射器(激光光源)和接收器(探测器)及时间记录装置(tdc)
ToF有两种,直接时间飞行(dToF)和间接时间飞行(iToF)
直接时间飞行(dToF):这种方式通过发射短脉冲光,并直接测量每个脉冲返回到传感器的时间来测量空间信息。它使用高灵敏度的单光子雪崩二极管(SPAD)检测单个光子,适用于构建时间的直方图,从而确定可能空间信息
间接时间飞行(iToF):这种方式则发射连续调制的光波,通过测量发射光与反射光之间的相位差来计算时间,从而确定空间。iToF通常使用标准的图像传感器架构来测量随时间变化的光强
相比而言,dToF除成本略高于iToF外,但其能提供更高的测量精度和较低的噪声干扰,适合长距离和低照明条件下使用。
但是不管是dToF还iToF,其中SPAD的探测性能都会直接的关系到回波光子是否能够被成功的捕获到,从有足够的数据支撑zui终结果的测算。
单光子雪崩二极管(SPAD)探测器是一种高灵敏度的光电探测器,能够检测到单个光子事件。它们在激光雷达(LiDAR)系统中的应用显著提高了距离测量和图像捕捉的性能,尤其在要求高分辨率和高精确度的场合。
SPAD探测器通过利用雪崩效应放大入射光子产生的光电流来实现单光子检测。这种探测器在被触发后会快速进入雪崩模式,可以检测很低光级的信号。这一特性使得SPAD尤其适用于光线较暗的环境或需要很高灵敏度的应用。这些特性,在激光雷达中起到着如下至关重要的作用
增强距离测量能力:在激光雷达系统中,距离的测量依赖于精确地检测发射的激光脉冲被目标反射回来的时间。距离越远,回波光子打到探测器的概率会越小,SPAD探测器的高灵敏度和高的光电转换效率在远距离测距时可以大大的提高捕获珍贵的回波光子的能力
提高低光环境下的性能:由于SPAD探测器对单个光子都非常敏感,它可以在光线非常微弱的情况下工作,这对于夜间或光照条件不佳的环境中的激光雷达应用尤为重要。
目前所用到的SPAD大多为单点式的,但随着激光雷达方向的研究不断深入,对于SPAD的要求也越来越高,单点SPAD的壁垒也越发明显,如:
单点SPAD通常具有较小的探测面积,意味着其能够捕获反射回的光子数量有限,降低了系统的整体性能,
难以覆盖较宽的视场角,这限制了激光雷达系统的应用范围,尤其是在需要广泛监控的场景中
在一些应用中,可能需要将多个SPAD阵列集成在一起以增加探测面积,来提高信号集成,但这会增加系统的复杂度和成本以及体积。
SPAD需要一定的“死时间”来恢复到下一个光子可以被探测的状态。在此期间,任何到达的光子都无法被检测到(光子堆积效应),这限制了其在高速应用中的使用。
单点式的SPAD往往需要搭配一个时间相关单光子计数器(TDC)来使用,这就意味着会大大增加激光雷达系统的体积,但是激光雷达系统往往会伴随着小型化的需求。
面日益增长的研究需求与设备性能上限的冲突,Pi Imaging与上海昊量光电推出了单光子阵列探测器—SPAD23。

SPAD23 设备采用了23个六边形排列的硅基单光子雪崩二极管(SPAD),这种独特的排列方式增加了有效探测面积,改善了传统单点SPAD面积小的限制。并且突破了阵列探测器中绝大多数都无法突破的技术难题:填充因子。该设备的光敏面大小为1.3mm×1.3mm,每个像素的大小为23um,填充因子大于80%,单光子光电转换效率为55%,对于探测面积、光的收集与捕获能力及探测视场角相较于单点SPAD是指数级增长的。且其23个探测器独立工作互不受彼此的死时间的影响,可以大大的少光子堆积效应对实验结果的影响。
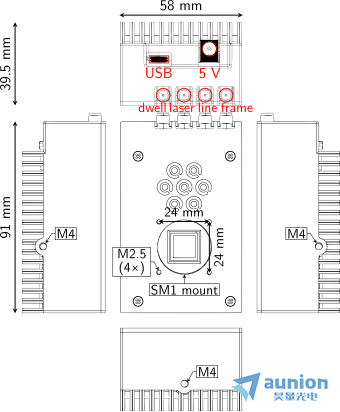
SPAD23的第二个亮点在于每一个探测器后面均连接一个10ps时间分辨率的TDC,这就意味着SPAD23的内部内置了23个SPAD探测器 + 23个TDC,仅需要自带软件即可一键获得23个探测器的直方图以及时间戳的信息,但是这种高度集成性并不会带来额外的体积影响,相反为了响应激光雷达研究小体积需求,其zui终体积仅有半个手机的大小,这远比传统形式的SPAD+多通道计数器的组合体积更小许多。
针对其实际表现,搭建了一个简易的激光测距光路来验证设备本身的性能,该简易光路的激光器使用的是40MHz重频的532nm波长的激光器,将绿光打在白板上,阵列探测器与激光器的出光孔在同一水平线上如下图所示:

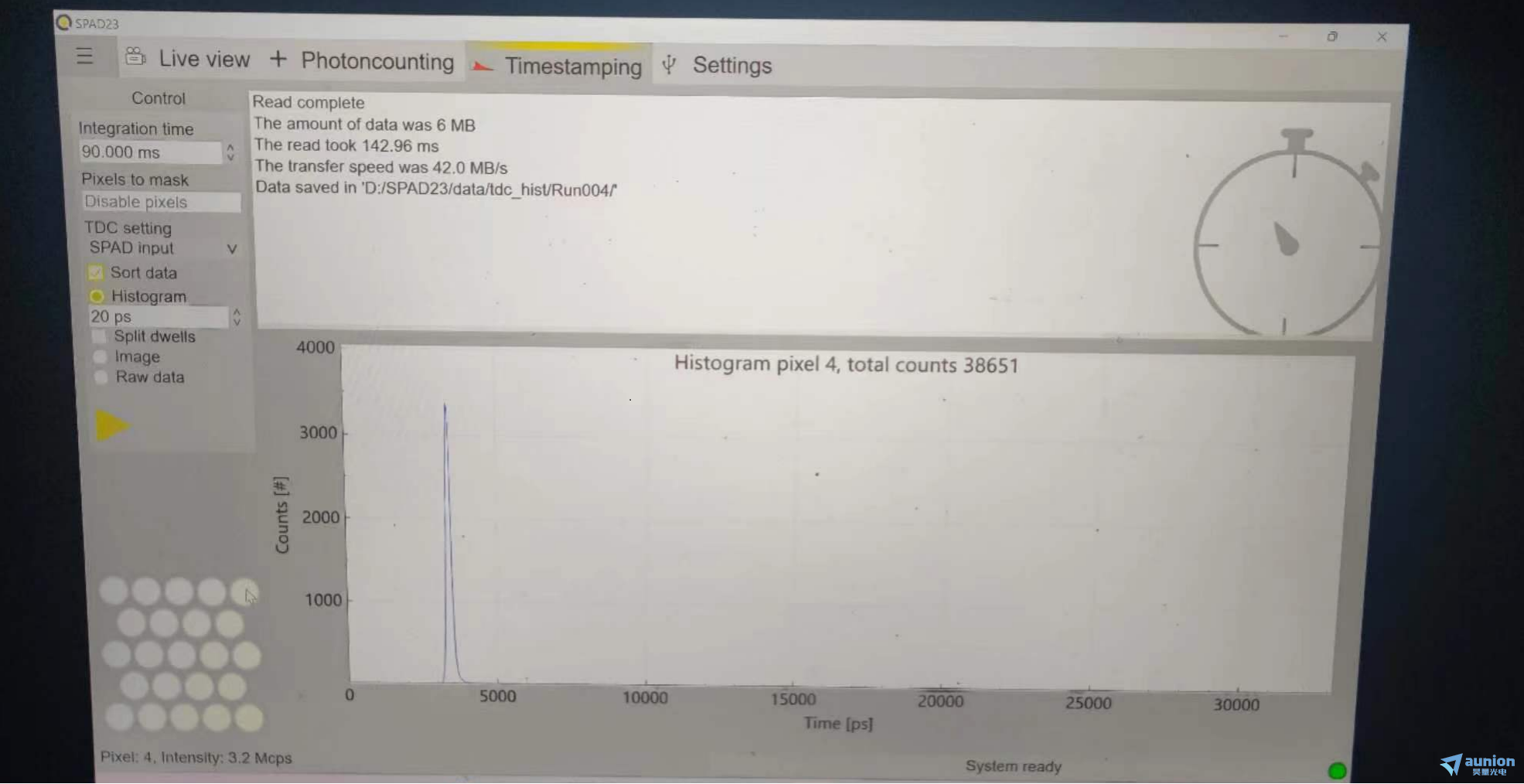
快速的搭建好实验设备后,只需要给SPAD23通入电源及USB连接线,连接好激光器的同步触发信号后,设置直方图的Bin宽为20ps(短为10ps),探测时间为90ms,点击开始按钮后,瞬间生成直方图,通过下图的直方图的图表信息,光子的峰值在3100ps,粗略计算两者之间的距离为0.93m÷2=0.465m,通过直方图存储的可视化数据精细计算,峰值所在的时间为第1590个Bin中,也就是3180ps,所以zui终距离为0.477m,这与实际量测结果相差无几。
上述的简易实验,可以粗略的展示SPAD23的在激光雷达方向的应用能力,凭借着其便携性、易用性、大面阵、高速率等独特的特性,已然成为激光雷达领域的新秀力量。
审核编辑 黄宇
-
激光雷达
+关注
关注
982文章
4548浏览量
197100
发布评论请先 登录
固态激光雷达参数以及避障视频
禾赛科技与九识智能签订20万颗激光雷达独家定点
禾赛科技位列全球激光雷达行业专利第一

如何解决激光雷达点云中“鬼影”和“膨胀”问题?

SPAD+VCSEL+LDD+MPD,海思推出高精度激光雷达方案
禾赛科技与理想汽车续签激光雷达合作
激光雷达为什么会出现串扰的问题?


速腾聚创激光雷达全球销量破百万,市占率26%居首

FMCW激光雷达,加速落地工业场景
索尼推出新一代激光雷达SPAD,像素提升超60%

SPAD席卷车载激光雷达市场
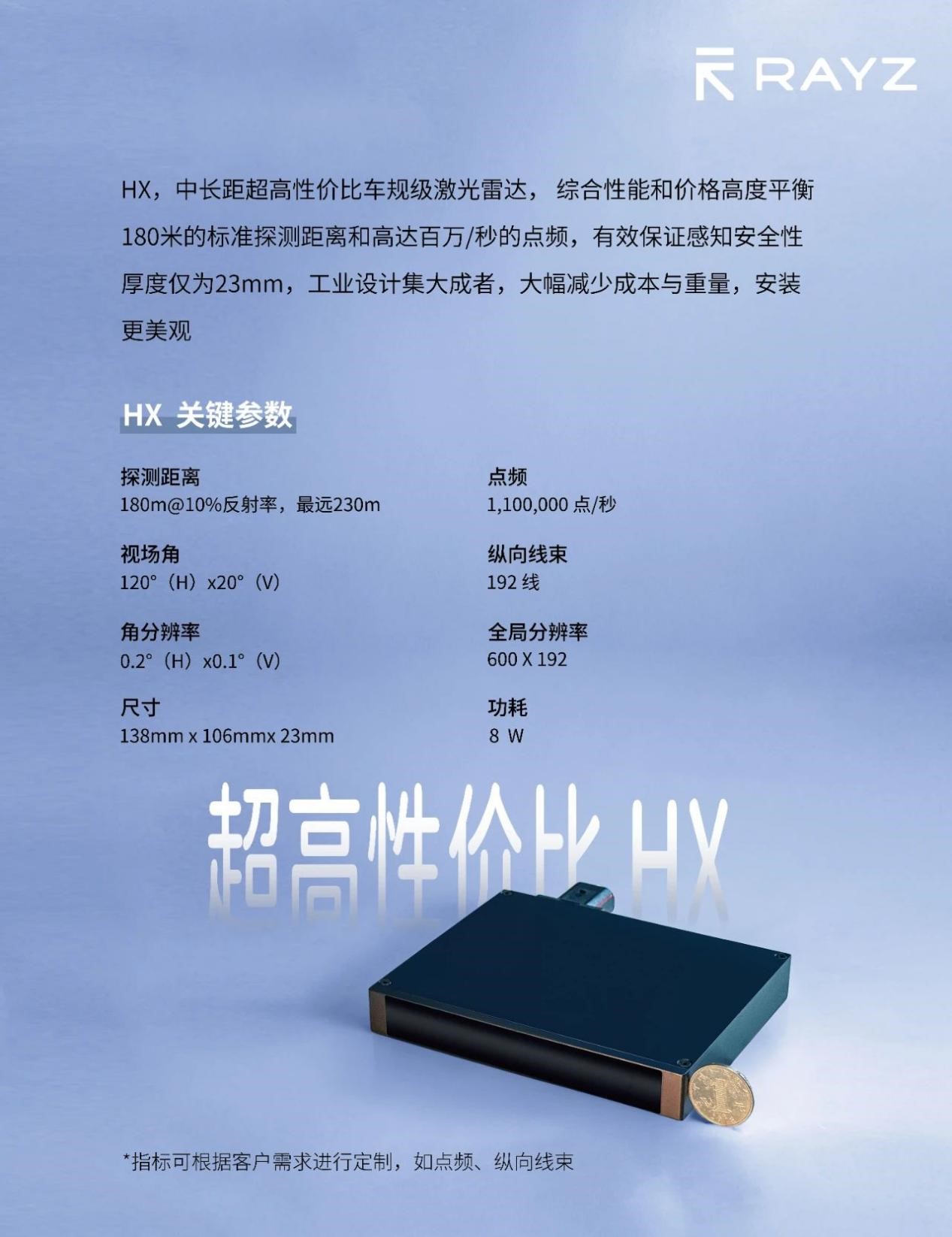
两款车规激光雷达新品:23mm超薄+广角
第三方激光雷达ASIC方案,能改变行业格局吗?
激光雷达在自动驾驶领域中的优势




评论