 激光雷达在自动驾驶领域中的优势
激光雷达在自动驾驶领域中的优势

激光雷达仿真
在自动驾驶系统中,激光雷达起到了至关重要的作用,它是实现高度自动驾驶的关键传感器之一。激光雷达通过发射和接收多束脉冲信号,通过测量ToF(Time of Flight,飞行时间),从而获取每一个发射光束方向上的距离信息,将空间环境转化为高密度点云数据,为自动驾驶算法提供不可或缺的环境感知信息。雷达感知数据作为自动驾驶算法的重要输入之一,在仿真平台中也需要尽可能还原真实激光雷达的测量过程,并输出与算法匹配的点云数据。
Sim Pro自动驾驶仿真平台依托光线追踪算法,对激光雷达脉冲的发射、环境反射及回波接收过程进行全链路动态建模,并结合激光雷达参数设置,实现输出不同种类、型号的雷达数据的功能,为自动驾驶算法的开发验证、场景测试及性能优化构筑起高度拟真的数据闭环。
在实现激光雷达仿真功能的同时,除了还原雷达的环境感知能力以外,还需要体现雷达的特性。对激光雷达而言,雨雪天气干扰,机械旋转导致的畸变,以及多回波功能等因素,都会对感知结果产生影响。本文会介绍一些激光雷达的典型特点,并讨论如何模拟出这些激光雷达特有的效果。
一、激光雷达的优势与特点
激光雷达在自动驾驶领域中的优势,在于其高精度测量能力与3D信息获取的属性。目前市面上常见激光雷达产品,测量误差普遍达到厘米级,能够更准确地识别和测量环境物体的形状,大小和空间距离。相比于相机这种视觉感知传感器,激光雷达凭借其探测3D深度的功能,对于三维环境的准确感知也有极大的帮助。相比于毫米波雷达,激光雷达输出的点云密度也相当高,这对于感知算法而言是十分友好的。此外,双回波模式的应用,进一步增强了激光雷达对复杂环境信息的采集能力。
但是,激光雷达也存在一些测量上的缺点。例如基于它的光学原理,激光雷达对低反射率物体的检测能力较弱,也可能受到一些环境光的影响;对于一些机械式激光雷达,高速运动的场景下,因扫描延迟形成的运动畸变问题,也会影响其对环境的感知能力。
二、双回波模式
激光雷达的双回波模式是指在一个激光点发射后,可以接收两个回波信号。由于激光雷达发射的光束数量固定,在相对较远处的点云会比较稀疏,而双回波模式可以体现光束方向上更多的物体信息。双回波产生的原因是在物理世界中,激光发射的光束是一个锥体而非一条直线,虽然该锥体的张角非常小,但是在一定距离下,仍然可能与多个物体发生接触从而产生多个回波。相比单回波模式,双回波模式需要更强的激光发射功率以避免反射功率过低导致的漏检测,并且需要更复杂的信号处理技术。
在激光雷达仿真中,由于使用的光追技术是计算几何意义上直线方向与环境面片的碰撞点,对于单回波模式而言,光追技术可以高效地完成射线方向的数据收集,在物理模型计算后输出点云。但是对于双回波模式,每一个发射信号可能接收2个信号,需根据光束发散角参数输入,设置更多光追射线并计算每个射线回波信号在时域上的累加。最后对接收信号进行峰值筛选,输出具有高回波功率的两个位置。该方案在沿用光追算法设计的情况下实现双回波模式功能,但需要更多的运算资源。
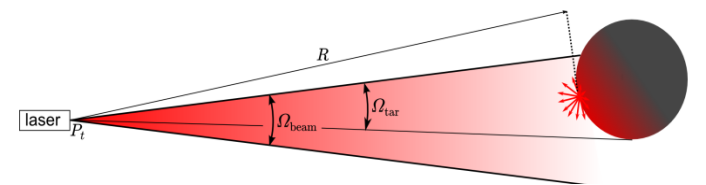
图:激光发射的光束是一个锥体而非一条直线
三、机械式激光雷达畸变
随着激光雷达技术的发展,目前很多最新的激光雷达都是固态激光雷达,其扫描的方式不依赖于雷达本身的旋转。而机械式激光雷达则是通过机械式旋转来对环境进行360度扫描,这就会导致在车辆自身运动的同时,雷达在旋转扫描,当雷达扫描结束输出数据时,其实环境已经发生了变化,由此导致数据产生畸变。尤其是在雷达转速较慢,环境相对速度快的时候,畸变会更明显。
Sim Pro中可以设置雷达的类型,并通过设置机械式雷达的转速来控制畸变的产生。目前比较常见的激光雷达仿真通常是在某一帧内同时发射所有光追射线并对数据进行处理,这种方法无法产生畸变效果。考虑到旋转式雷达的输出频率f_lidar远低于Sim Pro仿真频率f_sim,利用畸变产生的原理,在每一个仿真帧内设置对应角度为360°×f_sim/f_lidar的光追射线并保存数据,激光雷达旋转一周时将每一个仿真帧里储存的数据拼接,即可产生畸变效果。该方法从畸变原理出发,对于分辨率高的雷达,需要极高的仿真频率才可以得到较为平滑的畸变效果。
四、激光雷达的输出数据
不同型号的雷达都可以输出不同的文件格式,例如pcd,bin,bag等。其中主要包含雷达检测的三维信息,即传感器坐标系下的;此外,还可能含有每个点的强度,反射率,线束数,时间戳等数据,这就要求光追算法不仅获取射线接触mesh的位置信息,还需要获取材质,入射角等信息以便进行后续计算,这也对场景建模提出了要求——不仅要有准确的位置信息还需要准确且丰富的材质信息。
值得注意的是,多数激光雷达的线束并非均匀分布的,这和激光雷达的探测重点密切相关,由于自动驾驶汽车更关注与主车相似高度的环境,比如周围车辆,行人,障碍物等,因此在中间区域会有更为密集的射线覆盖。针对激光雷达的这一特点,也需要进行定制化设计,以匹配不同型号的激光雷达。
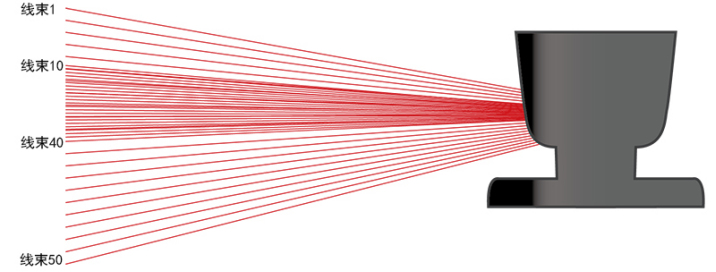
图:激光雷达线程角度并不是均匀分布的
激光雷达数据集对于自动驾驶至关重要,较为传统的激光SLAM(simultaneous localization and mapping)技术,能够借助激光点云数据对主车位姿进行定位;通过实车采集的点云数据,可以对环境进行3D建模,从而有助于提高仿真场景的真实性;而基于点云的3D目标识别算法,以及与相机等其他传感器的融合感知算法,更是环境感知中不可或缺的关键技术。
总结
激光雷达仿真对于自动驾驶仿真平台而言意义重大,自动驾驶的决策算法高度依赖感知模块的输出,因此传感器模块是仿真平台不可或缺的关键功能。由于传感器模块主要功能为环境感知,环境模型也十分重要,对于不同物体的材质属性也需要有明确的定义。Sim Pro自动驾驶仿真平台能够根据激光雷达的种类,型号,输入参数等,产生不同格式的点云数据,以匹配各种点云处理算法对于数据的需求。
-
仿真
+关注
关注
55文章
4536浏览量
138672 -
激光雷达
+关注
关注
982文章
4549浏览量
197110 -
自动驾驶
+关注
关注
794文章
14990浏览量
181559
原文标题:Sim Pro自动驾驶仿真平台激光雷达仿真
文章出处:【微信号:gh_c85a8e3c0f2a,微信公众号:赛目科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
自动驾驶中激光雷达搭载越多融合越困难吗?

自动驾驶激光雷达无法识别反光背心吗?
为啥有人认为自动驾驶纯视觉方案比激光雷达方案好?
4D点云加持,FMCW激光雷达助力自动驾驶更安全可靠

调频连续波(FMCW)为什么是自动驾驶激光雷达的未来?

FMCW和ToF激光雷达,哪种更适合自动驾驶?
自动驾驶激光雷达会伤害人体吗?

如何为自动驾驶汽车选择一款合适的激光雷达?

自动驾驶里的激光雷达有何作用?

自动驾驶激光雷达可以安装在哪些位置?
决定自动驾驶激光雷达感知质量的因素有哪些?

从自动驾驶到具身智能,激光雷达缘何一边被嫌弃,一边被追捧?
自动驾驶只用激光雷达进行感知会有哪些问题?
自动驾驶激光雷达之间会相互干扰吗?
激光雷达在自动驾驶中为何不可替代?




评论