 RT-Thread 新一代驱动框架 DM 揭秘:从设备树到动态加载,彻底告别硬编码 | 技术集结
RT-Thread 新一代驱动框架 DM 揭秘:从设备树到动态加载,彻底告别硬编码 | 技术集结

在传统的 RTOS 驱动开发中,硬件资源往往靠硬编码、设备与驱动强耦合,导致移植难、复用低、维护成本高。
如今,RT-Thread 推出了新一代DM(Device Manager)驱动框架,引入设备树(Device Tree)、自动匹配与动态 probe 机制,让驱动开发更加现代化、可扩展。
本文以qemu-virt64-aarch64 平台为例,带你从零上手DM 框架:
设备树的三种使用方式
最小系统与多核启动实战
与传统驱动框架的对比
如果你是嵌入式开发者或RT-Thread 爱好者,这篇文章将帮你快速掌握下一代 RT-Thread 驱动开发范式。
目录
简介
核心特点
两种驱动框架对比
DM使用方式(以qemu-virt64-aarch64为例)
1 简介
RT-Thread 新一代 DM(Device Manager)驱动框架,是近年来引入的一套现代化设备驱动管理模型。
该框架主要面向高性能平台(MPU / SoC),通过引入类似 Linux 驱动模型的设计理念,实现:
设备与驱动解耦
基于设备树(Device Tree)的硬件描述
自动匹配与动态加载(probe 机制)
其目标是逐步替代或并行于传统静态设备注册方式,构建更加统一、灵活、可扩展的驱动体系。
2 核心特点
基于设备树描述硬件资源
Driver / Device 解耦
自动匹配(compatible)
动态 probe / remove 机制
更适合复杂 SoC 平台
3 两种驱动框架对比

4 DM使用方式(以qemu-virt64-aarch64为例)
4.1 准备工作
获取最新RT-Thread源码 本文档使用commit: 2b58dec87b584aa7ded6e8c736498716f8d29cd0
进入BSP 目录:bsp/qemu-virt64-aarch64
打开menuconfig,开启 SMART 选项
下载 SMART 专用工具链,并设置RTT_EXEC_PATH与RTT_CC_PREFIX环境变量
4.2 设备树使用方式
在 DM 框架中,设备树(Device Tree)是核心输入,用于描述硬件资源(UART、GIC、VirtIO 等)。
当前支持三种方式:
方式一:使用 QEMU 自动生成 DTB
QEMU 的 virt 平台可以自动生成设备树,并通过寄存器传递给内核。
启动命令:
qemu-system-aarch64\ -M virt,gic-version=2\ -cpu cortex-a53\ -m128M\ -smp4\ -kernel rtthread.bin\ -nographic
原理:
QEMU 在启动时动态构建 DTB
将 DTB 地址通过寄存器传递
RT-Thread 在 early boot 阶段解析该 DTB
方式二:使用外部 DTB 文件
可以自定义 .dts 并编译为 .dtb,然后传给 QEMU:
qemu-system-aarch64\ -M virt\ -cpu cortex-a53\ -m128M\ -kernel rtthread.bin\ -dtb virt.dtb\ -nographic
设备树编译方法:
dtc -Idts -O dtb -o virt.dtbvirt.dts
方式三:内嵌设备树(RT-Thread 内置 DTB)
可以在 menuconfig 中配置:
RT_BUILTIN_FDT_PATH="path/to/your.dtb"
系统会通过 .incbin 将 DTB 嵌入到最终镜像中。
实现原理:
编译阶段将 DTB 二进制嵌入 .rodata
启动时直接使用内置 DTB,而不依赖 QEMU 传参
4.3 自定义设备树使用(最小系统示例)
本节基于一个最小可运行设备树(DTS),讲解如何在 RT-Thread DM 框架中使用自定义设备树。
4.3.1 最小设备树示例
/dts-v1/;/ { compatible ="linux,dummy-virt"; #address-cells =<2>; #size-cells =<2>; interrupt-parent = <0x8002>; memory@40000000{ reg = <0x000x400000000x000x8000000>; device_type ="memory"; }; chosen { stdout-path ="/pl011@9000000"; }; cpus { #size-cells =<0x00>; #address-cells =<0x01>; cpu@0{ reg = <0x00>; compatible ="arm,cortex-a53"; device_type ="cpu"; }; }; intc@8000000{ phandle = <0x8002>; reg = <0x000x80000000x000x100000x000x80100000x000x10000>; compatible ="arm,cortex-a15-gic"; ranges; #size-cells =<0x02>; #address-cells =<0x02>; interrupt-controller; #interrupt-cells =<0x03>; }; timer { interrupts = <0x010x0d0x1040x010x0e0x1040x010x0b0x1040x010x0a0x104>; always-on; compatible ="arm,armv8-timer\0arm,armv7-timer"; }; apb-pclk { phandle = <0x8000>; clock-output-names ="clk24mhz"; clock-frequency = <0x16e3600>; #clock-cells =<0x00>; compatible ="fixed-clock"; }; pl011@9000000{ clock-names ="uartclk\0apb_pclk"; clocks = <0x80000x8000>; interrupts = <0x000x010x04>; reg = <0x000x90000000x000x1000>; compatible ="arm,pl011\0arm,primecell"; };};
在上述设备树中只包含以下内容:

使用下述命令将dts编译为dtb,交由rt-thread去解析处理
dtc -Idts -O dtb -o qemu-virt.dtb qemu-virt.dts
使用如下命令启动QEMU:
qemu-system-aarch64\ -machine virt,gic-version=2\ -cpu cortex-a53\ -smp1\ -m128M\ -kernel rtthread.elf\ -dtb qemu-virt.dtb\ -nographic
可以看到系统启动成功LOG:
[I/rtdm.ofw] Booting RT-Thread on physical CPU 0x0[I/rtdm.ofw] Machine model: linux,dummy-virt[I/rtdm.ofw] Memory node(0) ranges: 0x0000000040000000 - 0x0000000048000000[I/mm.memblock] System memory:[I/mm.memblock] [0x0000000040000000, 0x0000000048000000][I/mm.memblock] Reserved memory:[I/mm.memblock] [0x0000000040080000, 0x00000000401ef000][I/mm.memblock] [0x00000000401ef000, 0x00000000441ef000][I/mm.memblock] [0x00000000441ef000, 0x00000000443ef000][I/mm.memblock] [0x00000000443ef000, 0x00000000443f5000][I/mm.memblock] physical memory region [0x0000000040000000-0x0000000040080000] installed to system page[I/mm.memblock] physical memory region [0x00000000443f5000-0x0000000048000000] installed to system page[I/mm.memblock] 63 MB memory installed to system page[I/osi.psci] Using PSCI v1.1 Function IDs[I/rtdm.ofw] Console: uart0()\ | /- RT - Thread Smart Operating System/ | \ 5.3.0 build Mar 19 2026 08102006 - 2024 Copyright by RT-Thread team[I/drivers.serial] Using /dev/ttyS0 as default console[E/DFS.fs] mount point(/proc) already mounted![I/rtdm.mnt] File system initializationdonehello rt-threadmsh />msh />msh /
4.3.2 设备树多核启动示例
在之前menuconfig中可以看到,当前系统是支持 SMP的,并且qemu-virt64-aarch64默认配置#define RT_CPUS_NR 4,这里启动两个CPU作为演示
那么我们需要额外配置一下设备树,首先配置CPUS节点
cpus { #address-cells = <1>; #size-cells = <0>; cpu@0{ reg = <0>; enable-method= "psci"; compatible ="arm,cortex-a53"; device_type ="cpu"; }; cpu@1{ reg = <1>; enable-method= "psci"; compatible ="arm,cortex-a53"; device_type ="cpu"; };};
在这个CPU配置中,CPU多核启动需要通过调用 PSCI来完成,所以设备树中需要加入PSCI的节点,如下:
psci { migrate = <0xc4000005>; cpu_on = <0xc4000003>; cpu_off = <0x84000002>; cpu_suspend = <0xc4000001>; method= "hvc"; compatible ="arm,psci-1.0\0arm,psci-0.2\0arm,psci";};
使用下述命令将dts编译为dtb,交由rt-thread去解析处理
dtc -Idts -O dtb -o qemu-virt.dtb qemu-virt.dts
使用如下命令启动QEMU:
qemu-system-aarch64\ -machine virt,gic-version=2\ -cpu cortex-a53\ -smp1\ -m128M\ -kernel rtthread.elf\ -dtb qemu-virt.dtb\ -nographic
可以看到系统启动成功LOG:
[I/rtdm.ofw] Booting RT-Thread on physical CPU 0x0[I/rtdm.ofw] Machine model: linux,dummy-virt[I/rtdm.ofw] Memory node(0) ranges: 0x0000000040000000 - 0x0000000048000000[I/mm.memblock] System memory:[I/mm.memblock] [0x0000000040000000, 0x0000000048000000][I/mm.memblock] Reserved memory:[I/mm.memblock] [0x0000000040080000, 0x00000000401ef000][I/mm.memblock] [0x00000000401ef000, 0x00000000441ef000][I/mm.memblock] [0x00000000441ef000, 0x00000000443ef000][I/mm.memblock] [0x00000000443ef000, 0x00000000443f5000][I/mm.memblock] physical memory region [0x0000000040000000-0x0000000040080000] installed to system page[I/mm.memblock] physical memory region [0x00000000443f5000-0x0000000048000000] installed to system page[I/mm.memblock] 63 MB memory installed to system page[I/osi.psci] Using PSCI v1.1 Function IDs[I/rtdm.ofw] Console: uart0()\ | /- RT - Thread Smart Operating System/ | \ 5.3.0 build Mar 20 2026 03142006 - 2024 Copyright by RT-Thread team[I/drivers.serial] Using /dev/ttyS0 as default console[E/DFS.fs] mount point(/proc) already mounted![I/rtdm.mnt] File system initializationdonehello rt-threadmsh />[I/cpu.aa64] Call cpu 1 on successmsh />msh />msh />
注:在之前所提到的,系统启动时是根据设备树来决定系统配置的,所以,即使我们定义了 #define RT_CPUS_NR 4 也还是启动了2个CPU
如果将QEMU启动时的参数 -smp 修改的比设备树中定义的多,或将 RT_CPUS_NR 修改的比设备树中定义的少,或将系统的SMP关掉会发生什么,这里建议上手验证一下
-
RTOS
+关注
关注
25文章
875浏览量
123391 -
驱动开发
+关注
关注
0文章
143浏览量
12782 -
RT-Thread
+关注
关注
33文章
1671浏览量
45670
发布评论请先 登录
基于RT-Thread的RoboMaster电控框架设计
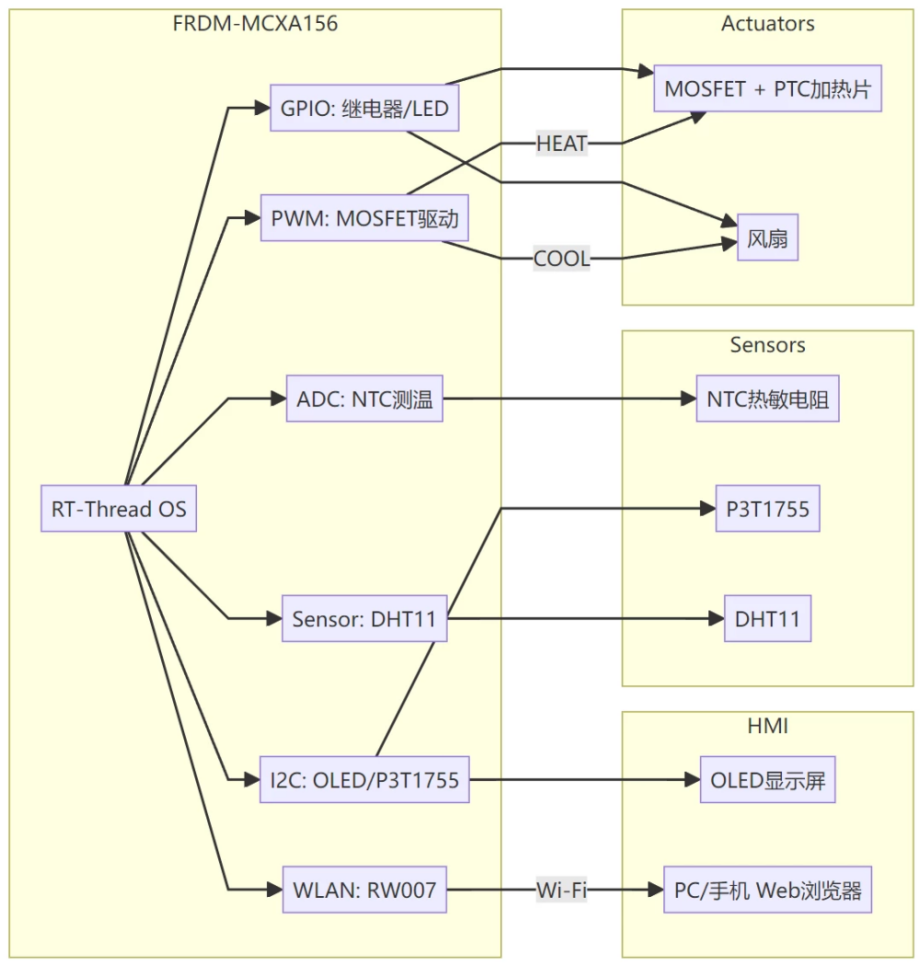
基于RT-Thread的简单物联网温控箱 | 技术集结
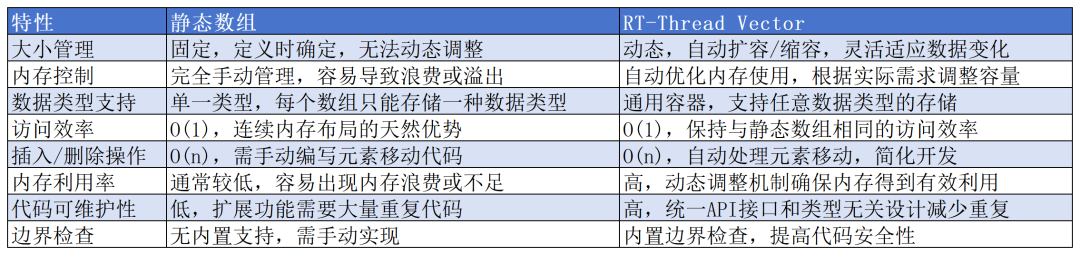
RT-Thread Vector软件包:嵌入式开发的动态数组容器 | 技术集结
从0到1,教你彻底学透RT-Thread
RT-Thread全球技术大会:RT-Thread上的单元测试框架与运行测试用例
RT-Thread全球技术大会:RNDIS设备介绍及应用

RT-Thread全球技术大会:RNDIS通信协议原理及主机驱动框架

基于 RT-Thread 的 RoboMaster 电控框架(一)
基于RT-Thread的RoboMaster电控框架(二)

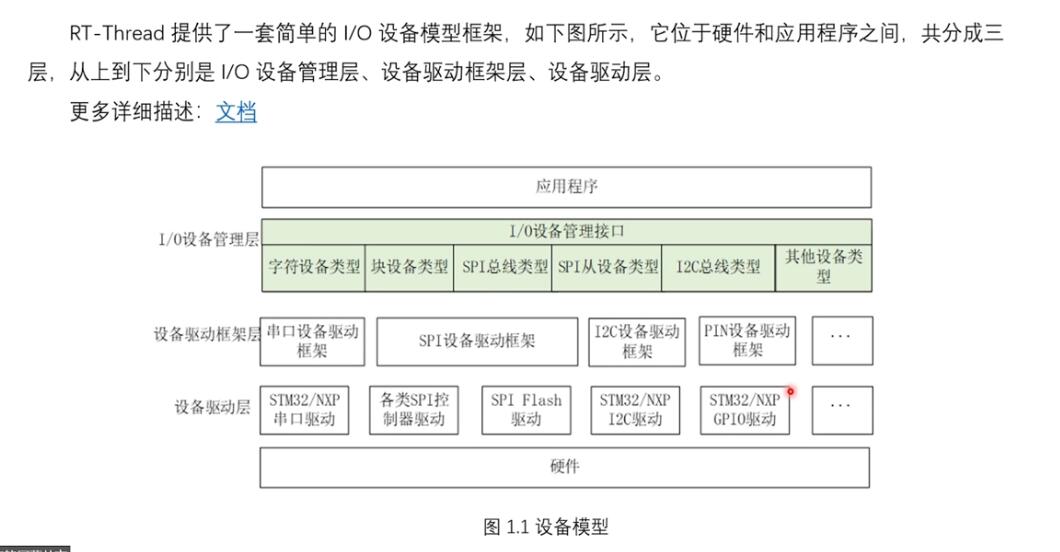
RT-Thread 中设备树的适配方法 | 技术集结




评论