 雷龙LSYT201B语言模块结合STM32使用(噪声环境也能高精度)
雷龙LSYT201B语言模块结合STM32使用(噪声环境也能高精度)

雷龙LSYT201B语音模块配合STM32使用视频示例:https://www.bilibili.com/video/BV1SZ421M7oE?t=2.9
前言
基于YT2228芯片开发的一款面向智能家居控制的离线语音控制模组,离线语音模块,集成蓝牙功能,可适配各种不同的应用场景,方便使用,减少开发周期。模块通过麦克风对语音进行采集,然后由语音芯片进行识别处理,识别成功的结果可通过语音进行播报和通过串口下发指令给整机控制板。
一、LSYT201B
一、产品简介
YT2228 是根据智能语音交互市场需求及思必驰算法的发展方向定义开发的 “芯片+算法”人工智能人机语音交互解决方案,具有高性能、低功耗等特点。
该芯片通过软硬融合的方法,具备快速赋予各类设备语音交互的能力,极大的提高了用户体验和产品灵活性。该芯片支持家居5m交互,本地最多可识别150词,具备多轮交互能力。
二、产品特征
2.1 处理器
32位处理器,支持FPU(Hardware Float Point Unit)
运行频率:240MHz
内置 2MB FLASH
64中断向量
4级别中断优先级
2.2 外设
USB1.1
4个多功能16位定时器,支持捕获和PWM模式
3个16位PWM发生器,可用于驱动电机
2个SPI
所有GPIO支持外部中断
2.3 音频
两通道 16 位 DAC,SNR> = 95dB
单通道 16 位 ADC,SNR> = 90dB
采样率支持 8KHz / 11.025KHz / 16KHz / 22.05KHz / 24KHz
/32KHz / 44.1KHz / 48KHz
2.4 蓝牙
符合蓝牙 V5.1 + BR + EDR + BLE 规范
满足 Class1 class2 和 class3 传输功耗需求
支持 GFSK 和 π/ 4 DQPSK 所有包装类型
最大+ 6dbm 发射功率
接收器最小灵敏度
2.5 电源
VBAT供电DC: 3.0V - 5.5V
VDDIO可输出50mA@2.2-3.6V
模组功耗:50mA
2.6 封装
VSSOP28(0.635)/QSOP28
2.7 温度
工作温度:-40℃ to +85℃
存储温度:-65℃ to +150℃
2.8 应用领域
智能家电(生活电器、厨房家电等)
智能卫浴、智能照明、智能家居
智能玩具
空调伴侣
二、使用步骤
现在也已经大致了解了这个模块的功能,那么能不能结合单片机来使用呢。
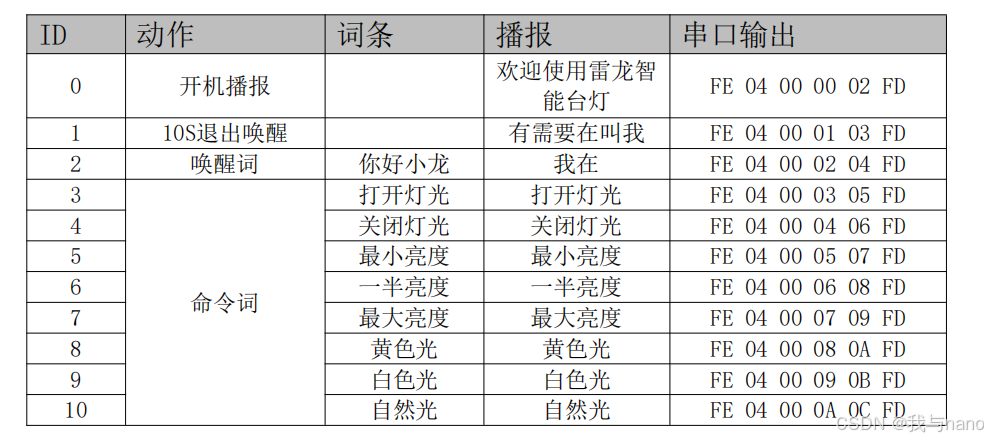
1.UART 控制协议
先来看一下他的通信协议
采用标准 UART 异步串口接口, 3.3V TTL 电平。通讯格式
波特率9600、数据位8 位、停止位1 位、奇偶校验位无、流控无。

有了这些东西去对他进行开发还不是轻轻松松,关键效果怎么样呢(太强了,从视频里就能看出)
2.代码
废话不多说直接贴代码。由于STM32接收的是ASII码,我们先将他转十六进制字符串,然后用strcmp来对字符串作比较。
代码如下:
#include "sys.h"
#include "usart.h"
#include "led.h"
#include "string.h"
//
//如果使用ucos,则包括下面的头文件即可.
#if SYSTEM_SUPPORT_OS
#include "includes.h" //ucos 使用
#endif
#if 1
#pragma import(__use_no_semihosting)
//标准库需要的支持函数
struct __FILE
{
int handle;
};
FILE __stdout;
//定义_sys_exit()以避免使用半主机模式
_sys_exit(int x)
{
x = x;
}
//重定义fputc函数
int fputc(int ch, FILE *f)
{
while((USART2->SR&0X40)==0);//循环发送,直到发送完毕
USART2->DR = (u8) ch;
return ch;
}
#endif
/*使用microLib的方法*/
/*
int fputc(int ch, FILE *f)
{
USART_SendData(USART1, (uint8_t) ch);
while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET) {}
return ch;
}
int GetKey (void) {
while (!(USART1->SR & USART_FLAG_RXNE));
return ((int)(USART1->DR & 0x1FF));
}
*/
#if EN_USART1_RX //如果使能了接收
//串口1中断服务程序
//注意,读取USARTx->SR能避免莫名其妙的错误
u8 USART_RX_BUF[USART_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.
//接收状态
//bit15, 接收完成标志
//bit14, 接收到0x0d
//bit13~0, 接收到的有效字节数目
u16 USART_RX_STA=0; //接收状态标记
u8 USART2_RX_BUF[USART_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.
//接收状态
//bit15, 接收完成标志
//bit14, 接收到0x0d
//bit13~0, 接收到的有效字节数目
u16 USART2_RX_STA=0; //接收状态标记
void uart_init(u32 bound){
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //使能USART1,GPIOA时钟
//USART1_TX GPIOA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.9
//USART1_RX GPIOA.10初始化
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;//PA10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.10
//Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
//USART 初始化设置
USART_InitStructure.USART_BaudRate = bound;//串口波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART1, &USART_InitStructure); //初始化串口1
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启串口接受中断
USART_Cmd(USART1, ENABLE); //使能串口1
}
void uart2_init(u32 bound){
//GPIO端口设置
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //使能GPIOA时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2,ENABLE); //使能USART2
//USART2_TX GPIOA.2
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2; //PA.2
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.2
//USART1_RX GPIOA.3初始化
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;//PA3
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.3
//Usart2 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
//USART 初始化设置
USART_InitStructure.USART_BaudRate = bound;//串口波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART2, &USART_InitStructure); //初始化串口2
USART_ITConfig(USART2, USART_IT_RXNE, ENABLE);//开启串口接受和发送中断
USART_Cmd(USART2, ENABLE);
}
void USART2_IRQHandler(void) //??2??????
{
u8 Res,t;
/
if(USART_GetITStatus(USART2, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾)
{
Res =USART_ReceiveData(USART2); //读取接收到的数据
if((USART2_RX_STA&0x8000)==0)//接收未完成
{
if(USART2_RX_STA&0x4000)//接收到了0x0d
{
if(Res!=0x0a)USART2_RX_STA=0;//接收错误,重新开始
else USART2_RX_STA|=0x8000; //接收完成了
}
else //还没收到0X0D
{
if(Res==0x0d)USART2_RX_STA|=0x4000;
else
{
USART2_RX_BUF[USART2_RX_STA&0X3FFF]=Res ;
USART2_RX_STA++;
if(USART2_RX_STA>(USART2_REC_LEN-1))USART2_RX_STA=0;//接收数据错误,重新开始接收
}
}
}
}
}
void USART1_IRQHandler(void) //串口1中断服务程序
{
u8 Res;
char result[100];
char hex_string[30];
#if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS为真,则需要支持OS.
OSIntEnter();
#endif
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾)
{
Res =USART_ReceiveData(USART1); //读取接收到的数据
sprintf(hex_string,"%02X", Res);
//printf("%srn",hex_string);
sscanf(hex_string + 5, "%s", hex_string);
if(!strcmp(hex_string,"03"))
{
GPIO_ResetBits(GPIOB,GPIO_Pin_5);
GPIO_ResetBits(GPIOE,GPIO_Pin_5);
}
if(!strcmp(hex_string,"04"))
{
GPIO_SetBits(GPIOB,GPIO_Pin_5);
GPIO_SetBits(GPIOE,GPIO_Pin_5);
}
if((USART_RX_STA&0x8000)==0)//接收未完成
{
if(USART_RX_STA&0x4000)//接收到了0x0d
{
if(Res!=0x0a)USART_RX_STA=0;//接收错误,重新开始
else USART_RX_STA|=0x8000; //接收完成了
}
else //还没收到0X0D
{
if(Res==0x0d)USART_RX_STA|=0x4000;
else
{
USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ;
USART_RX_STA++;
if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//接收数据错误,重新开始接收
}
}
}
}
#if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS为真,则需要支持OS.
OSIntExit();
#endif
}
#endif
总结
兄弟们,太强了,25块钱能够抗噪声的语音识别播报一体模块,还要什么自行车。就是唤醒词不能自己定制,需要联系技术人员帮你定制。(可以远程)
————————————————
雷龙发展公司致力于为客户提供一站式的离线语音解决方案。我们的服务涵盖了多个领域,包括家电、医疗器械、安防报警、汽车电子、多媒体、通信、电话录音、工业自动化控制、玩具及互动消费类产品等。通过我们的专业知识和经验,我们能够满足各类产品的语音交互需求,让用户享受更加智能、便捷的使用体验。
审核编辑 黄宇
-
STM32
+关注
关注
2313文章
11191浏览量
374603 -
智能家居
+关注
关注
1945文章
10037浏览量
197851 -
人机语音
+关注
关注
0文章
3浏览量
7239
发布评论请先 登录
AD7190:高精度测量应用的理想选择
AD7195:高精度测量的理想选择
探索ADMX3651数字电压表:高精度与灵活性的完美结合
如何用锁相放大器实现高精度LCR测量

深入了解OP27:低噪声、高精度运算放大器的卓越之选
高精度低噪声运放OP2177的特性与应用解析
高性能双路运算放大器OP270:低噪声与高精度的完美结合
高精度、低噪声运放AD8674的特性与应用
探索ADA4610系列JFET运放:高精度与高性能的完美结合
用吉时利源表2636B实现高精度电阻测量的方法

探索Littelfuse CH1B032B电流传感器:高精度与可靠性的完美结合
Telaire T6793 CO₂ 传感器模块:高精度与便捷性的完美结合
单天线也能高精度导航?组合导航如何做到低成本与高性能兼得?

芯资讯|唯创电子WTU201F2 B004 红外接近模块:开启卫生间冲水箱智能洁净新时代




评论