 SLAM激光导航搭配末端3D视觉相机定位, 1+1>2
SLAM激光导航搭配末端3D视觉相机定位, 1+1>2

当我们谈论日益热门的工业4.0、智能制造这些话题时,机器人是一个无论如何也绕不开的问题。机器人的智能化程度影响着整个工业演化的进程,传统的机器人仅能在严格定义的结构化环境中执行预定指令动作,在部分行业实际应用中,无法突破环境局限,使得末端定位精准度无法达到预期要求,这极大地限制了机器人的应用与发展。
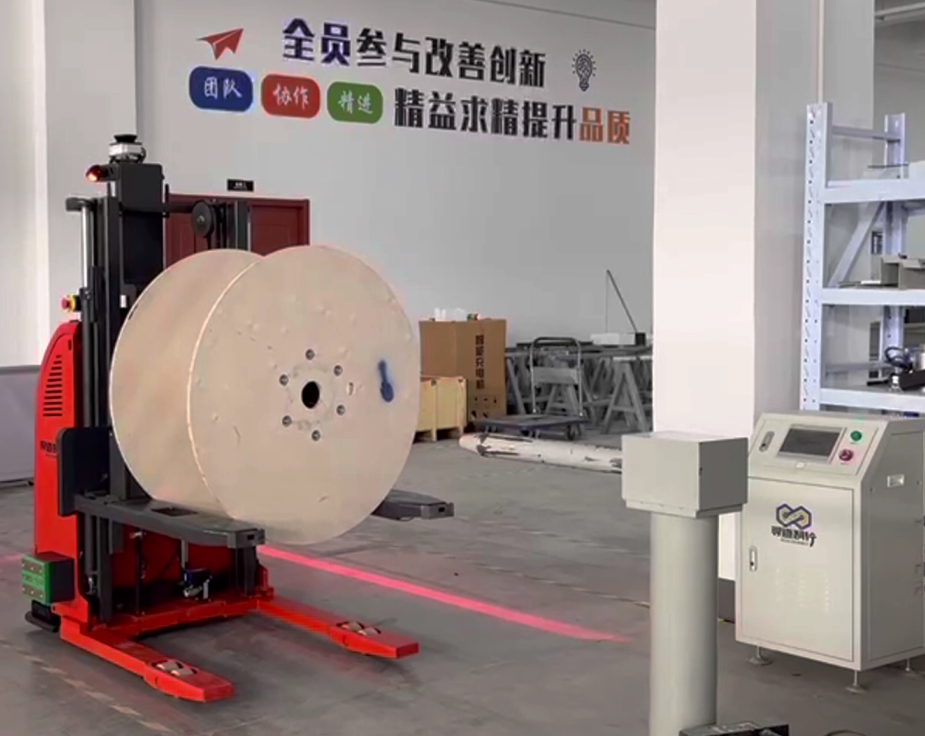
此次寻迹智行在给客户的解决方案中将SLAM激光导航系统与3D视觉相机末端定位结合,解决了实际应用中货品存放取精度要求高、环境复杂的难题。
客户需求:
1、线缆盘放置架对接线缆盘取放
2、末端精准度正负5mm
3、角度偏离自动清除误差,精准对接
解决方案:
1、L12C车体+定制化超宽货叉
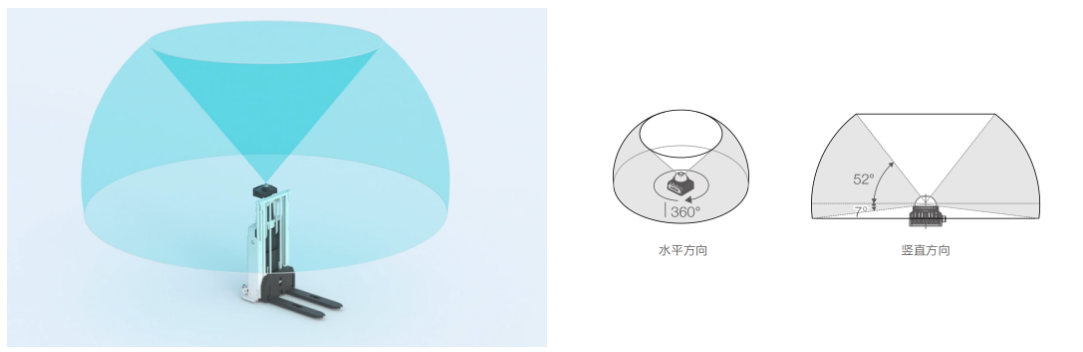
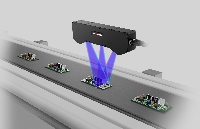
2、SLAM激光导航运动系统+3D视觉相机末端定位
3、RMS自研调度系统
客户效益:
1、解决了线缆放置架与线缆盘对接口直径过小,人工对接难度大的问题
2、保障生产安全,杜绝满载搬运的安全风险
3、生产节拍准点率提高60%,大大提高生产效率
4、人工放置偏离,通过此方案3D视觉相机扫图自动校准,清除误差,保障搬运的精准度
寻迹智行机器人以技术为驱动,不断提升自研核心硬件&算法,引领百业应对多种复杂场景,帮助工厂实现从仓储物流到生产物流各环节物料的高效周转,为企业降本增效。
截至目前,众多行业巨擘基于寻迹机器人在智能物流场景、方案和技术上的创新成绩,选择与寻迹智行机器人展开深度合作,共同推进智能物流不断发展,谱写搬运机器人应用新明天~
审核编辑 黄宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
31455浏览量
223688 -
激光
+关注
关注
21文章
3709浏览量
69824 -
3D
+关注
关注
9文章
3023浏览量
115577 -
SLAM
+关注
关注
24文章
459浏览量
33423 -
AGV
+关注
关注
28文章
1572浏览量
43794
发布评论请先 登录
相关推荐
热点推荐
ROS2 SLAM建图与导航实战--基于米尔RK3576开发板
SLAM Toolbox的自主机器人系统构建过程。
7.2 下一步研究方向
多机器人SLAM与地图合并
语义导航(目标检测+导航)
强化学习局部规划器
发表于 03-12 17:55
iDS iToF Nion 3D相机,开启高性价比3D视觉新纪元!
、uEye Nion iTof 3D相机 | 产品特点 1. 三大优势特点概括 精度卓越 具备120万像素超高分辨


什么是激光雷达 3D SLAM技术?
在智能移动设备自主运行的赛道上,激光雷达3DSLAM技术正成为破局关键,但多数人对其认知仍停留在表层。要读懂这一核心技术,不妨先回溯“SLAM”的本质——SLAM

从3D传感器到立体相机,解锁工业应用新可能
3D传感器是实现深度感知的核心技术。这些传感器广泛应用于多种常见的3D视觉技术中,例如立体相机、激光雷达(LiDAR)、飞行时间(ToF)

友思特应用 | 基于高精度双目散斑 3D 相机的放射治疗视觉定位应用
面临挑战。本文将深入探讨基于高精度双目散斑3D相机的视觉定位系统如何革新放疗定位流程,提升治疗的安全性与有效性。
全新轻量级ViSTA-SLAM系统介绍
无需相机内参、极致轻量的前端(前端模型大小仅为同类35%),实时单目视觉SLAM,ViSTA-SLAM。与现有方法相比,ViSTA-SLAM

季丰电子邀您相约2025国际3D视觉感知与应用大会
9月20日 - 21日,国际3D视觉感知与应用大会将在苏州太湖国际会议中心盛大启幕,大会议题涵盖3D成像与测量、3D视觉、
iTOF技术,多样化的3D视觉应用
视觉传感器对于机器信息获取至关重要,正在从二维(2D)发展到三维(3D),在某些方面模仿并超越人类的视觉能力,从而推动创新应用。3D
发表于 09-05 07:24
奥比中光发布最新一代3D激光雷达及双目深度相机
近日,世界机器人大会现场,奥比中光发布最新一代3D激光雷达及双目深度相机,以“场景拓展”与“极限感知”为核心优势,进阶全领域能力矩阵,刷新机器人性能上限,为各类机器人带来更灵活可靠的视觉
如何提高3D成像设备的部署和设计优势
3D视觉技术正快速普及,其增长得益于成本下降和软件优化,应用场景从高端工业扩展到制造、物流等领域。该技术通过1-2台3D相机替代多台

解析寻迹智行3D SLAM无人叉车的"智慧"从何而来?(本文纯干货)
寻迹智行率先研发成功3D SLAM激光导航技术在无人叉车领域应用并实现规模化量产,成功突破高精度环境感知与自主决策的技术瓶颈,重新定义仓储物流的智能化标准。
光子精密双目3D线激光轮廓测量仪,摆脱视觉盲区,1台更比2台强!
光子精密双目3D线激光轮廓测量仪(GL-8160D),在GL-8000系列的基础上创新升级。GL-8160D采用全新双目单线设计,突破传统3D

【「# ROS 2智能机器人开发实践」阅读体验】视觉实现的基础算法的应用
的本质是解决“鸡与蛋”问题:机器人需要地图来定位,又需要准确定位来构建地图。书中从前端(传感器数据处理)和后端(位姿优化)两个层面解析了SLAM的算法逻辑。
激光雷达和
发表于 05-03 19:41



评论