 实测ubuntu20.04机械式激光雷达与相机联合标定
实测ubuntu20.04机械式激光雷达与相机联合标定

安装功能包
实测 ubuntu20.04 本地安装
安装步骤如下:
下载功能包
git clone -c http.sslverify=false https://gitlab.acfr.usyd.edu.au/its/cam_lidar_calibration.git
成功提示:
安装依赖:
sudo apt update && sudo apt-get install -y ros-noetic-pcl-conversions ros-noetic-pcl-ros ros-noetic-tf2-sensor-msgs
成功提示:
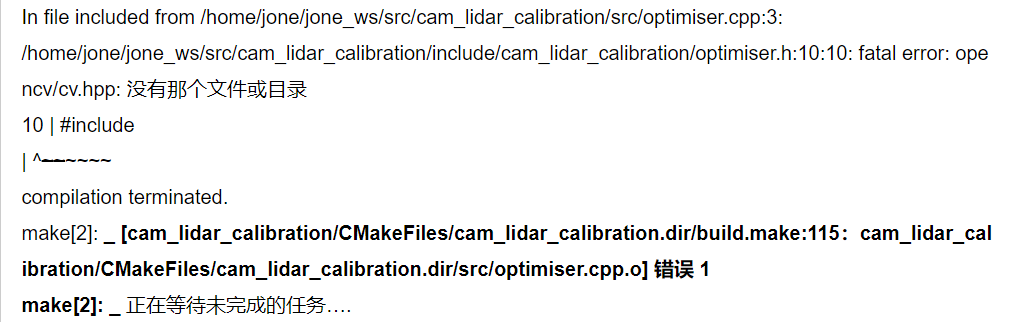
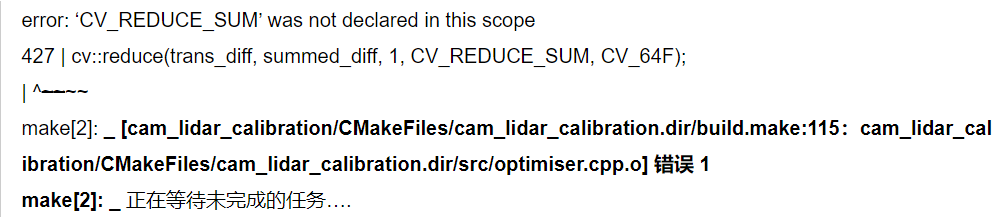
CV_REDUCE_SUM 这个变量没定义,opencv3到opencv4切换带来的错误
在 optimise.h文件中加入下面的包含文件
编译通过
功能包测试
作者在功能包中放了测试数据,提供测试
roslaunch cam_lidar_calibration run_optimiser.launch import_samples:=true
该程序根据cam_lidar_calibration/data/vlp/文件夹下的pose.csv标定,在该文件夹生成一个标定camera和lidar外参文件
终端输出
每一行则是迭代后的结果
终端输出这个的时候

表示迭代完了
然后获取评估校准结果
终端输出

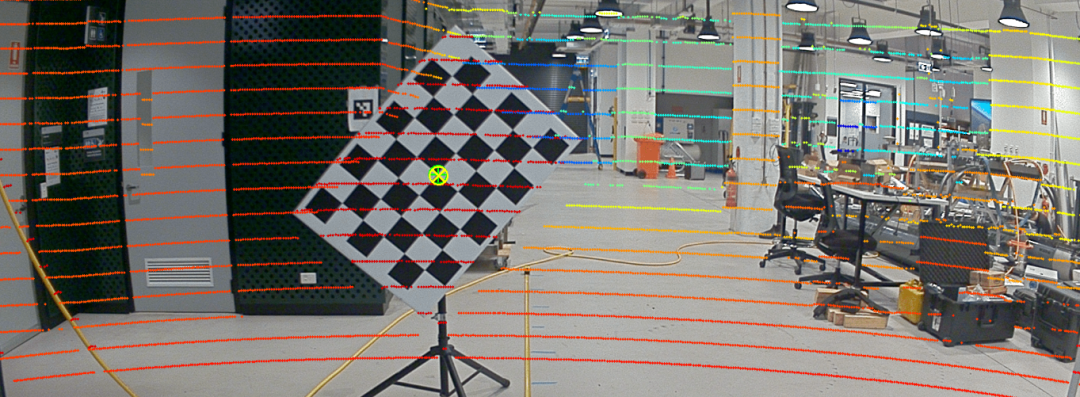
生成一个雷达投射到图片上的图片
利用功能包标定激光雷达和相机
设置参数
主要修改
cam_lidar_calibration/cfg/camera_info.yaml和
params.yaml
cam_lidar_calibration/cfg/camera_info.yaml 文件设置如下:
distortion_model: "non-fisheye"width: 1440height: 1080D: [-0.106460,0.103712,-0.000019,0.003994]K: [1213.343583,0.0,744.150520,0.0,1217.236982,586.154363,0.0,0.0,1]
设置是:
-
否为鱼眼相机
-
像素宽和高
-
内参矩阵
-
失真系数
相机的内参标定方法可以参考这篇博客:
params.yaml 文件设置如下:
# Topicscamera_topic: "/camera_array/cam0/image_raw"camera_info: "/camera_array/cam0/camera_info"lidar_topic: "/velodyne_points"
分别是:
-
相机消息名称
-
相机信息
-
激光雷达消息名称
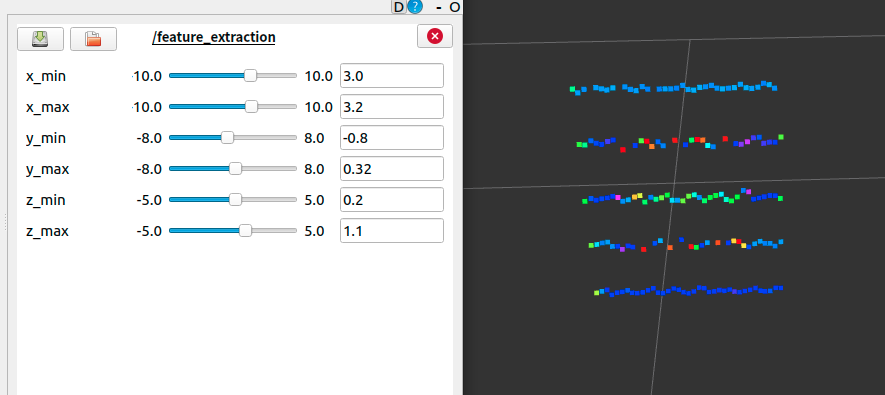
feature_extraction: x_min: -10.0 x_max: 10.0 y_min: -8.0 y_max: 8.0 z_min: -5.0 z_max: 5.0
点云的选取范围,用默认的就是,之后可以在线调
chessboard: pattern_size: height: 14 width: 9 square_length: 11 board_dimension: width: 390 height: 596 translation_error: x: 0 y: 0
标定棋盘的相关参数
和背板的相关参数
距离都是mm为单位
启动相机和激光雷达
启动相机
roslaunch spinnaker_sdk_camera_driver acquisition.launch
启动激光雷达
roslaunch velodyne_pointcloud VLP16_points.launch
启动功能包
开启程序采集表定数据,运行命令:
roslaunch cam_lidar_calibration run_optimiser.launch import_samples:=false
会出现RVIZ和rqt_reconfigure窗口,在RVIZ中panels->display修改相机的话题和激光雷达点云对应的frame_id。
调整rqt_reconfigure /feature_extraction的xyz最大值最小值以使得标定板的点云和周围环境分开,使其仅显示棋盘。
如果棋盘没有完全隔离,可能会影响棋盘的平面拟合,还会导致棋盘尺寸误差较大。下图是过滤点云前后效果:
在过滤周围环境点云后,在rviz中点击Capture sample采集样本,会出线绿色框代表根据点云拟合出来的标定板平面
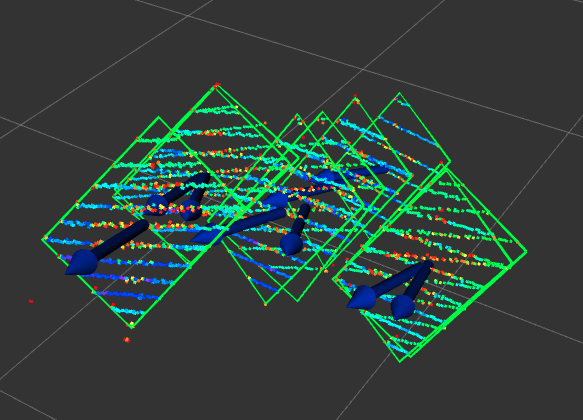
终端会打印出来添加的样本信息
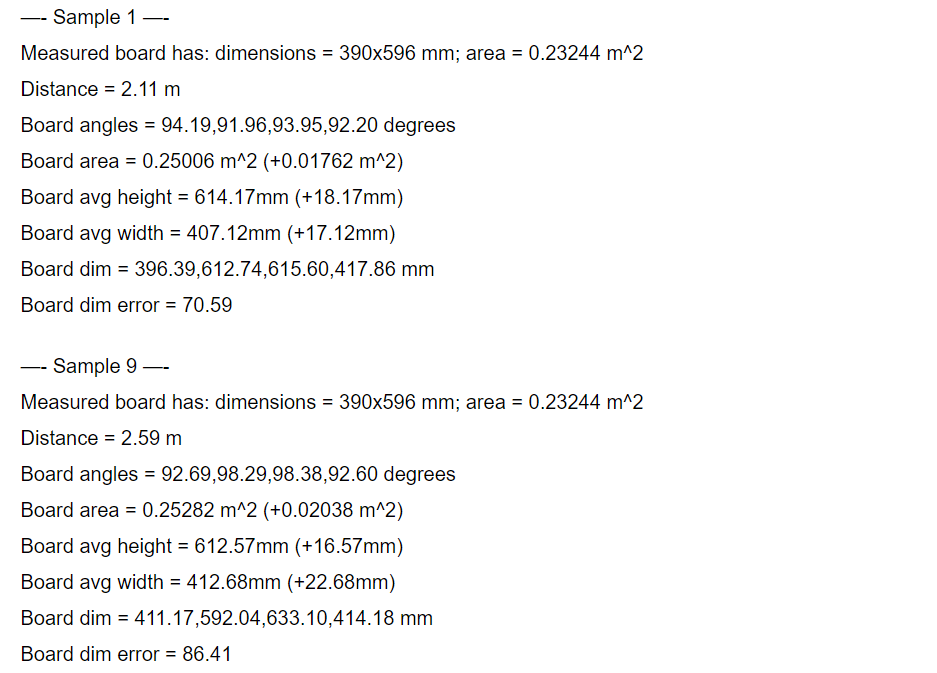
最好采集10个样本以上,再点击rviz中的optimise进行标定,在优化过程中将会在cam_lidar_calibration/data生成当前时间日期的文件夹,存放采集的图像、点云pcd、位姿,标定后camer和lidar外参文件。
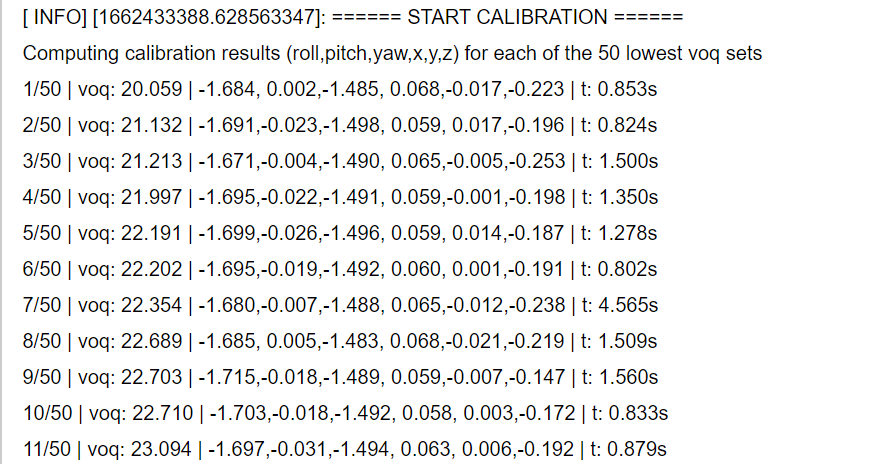
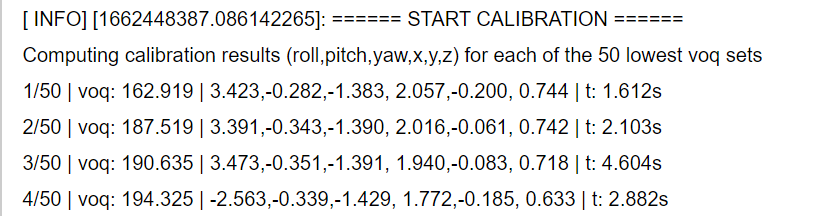
终端输出开始校准:
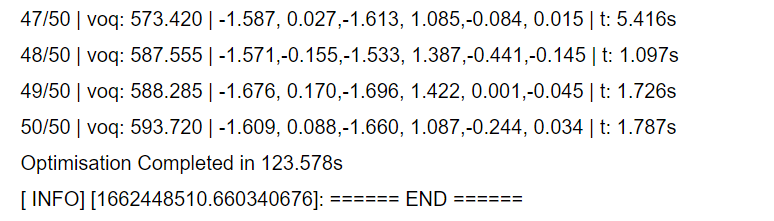
校准结束后输出:
评估参数和重投影误差:
roslaunch cam_lidar_calibration assess_results.launch csv:="$(rospack find cam_lidar_calibration)/data/2022-09-06_14-48-42/calibration_2022-09-06_15-13-07.csv" visualise:=true
注意这里默认加载第16个图像,如果没有那么大的标定样本,要修改launch文件中的加载序列
出现重投影效果图像
终端出现标定参数和重投影误差
审核编辑 :李倩
-
相机
+关注
关注
5文章
1634浏览量
56081 -
激光雷达
+关注
关注
983文章
4595浏览量
197406
原文标题:实测 ubuntu20.04 机械式激光雷达与相机联合标定
文章出处:【微信号:3D视觉工坊,微信公众号:3D视觉工坊】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
万线激光雷达是依托什么技术实现的?

自动驾驶激光雷达应如何进行标定?

固态激光雷达参数以及避障视频
如何解决激光雷达点云中“鬼影”和“膨胀”问题?

全固态激光雷达现在发展到什么阶段了?

禾赛科技与理想汽车续签激光雷达合作
激光雷达为什么会出现串扰的问题?

激光雷达创新思路:机械扫描+Flash合二为一

系统适配 | RK3576适配Ubuntu20.04正式发布


全固态激光雷达为什么迟迟未来?其技术难点是什么?
系统适配 | RK3588适配Ubuntu20.04发布预告
SPAD席卷车载激光雷达市场
机械、半固态、全固态激光雷达有何区别?谁更适合自动驾驶?




评论