在过程控制中,按偏差的比例(P)、积分(I)和微分(D)进行控制的PID控制器是应用最为广泛的一种自动控制器。它具有原理简单,易于实现,适用面广,控制参数相互独立,参数的选定比较简单等优点;而且在理
2018-03-16 13:56:59 29005
29005 
在电机控制中,我们给电机输出的是一个PWM占空比的数值。 话不多说,直接上位置式PID基本公式: 控制流程图如下: 上图中的目标位置一般我们可以通过按键或者开关等方式编程实现改变目标值,测量位置就是通过 stm32 去采集编码器的数
2023-08-23 09:31:145592 
51单片机用三个开关控制三个直流电机要做到现先启动先停止
2023-10-26 06:09:49
PID控制中有P、I、D三个参数,只有明白这三个参数的含义和作用才能完成控制器PID参数整定,让控制器到达最佳控制效果。昌晖仪表在本文给大家介绍PID控制中P、I、D参数的作用。
比例作用
比例
2023-06-20 06:50:53
前言如何学习PID控制,最开始需要先抛开各种软硬件,单纯从数学上进行分析,弄懂底层的控制原理是什么?理解清楚后,无非把数学公式变成代码。剩下就是不断的实践,来确定三个参数,使控制结果更加准确。开始介绍
2022-01-14 09:27:14
PD 微分控制PID基本公式1. PID简介目前工业自动化水平已成为衡量各行各业现代化水平的一个重要标志。同时,控制理论的发展也经历了古典控制理论、现代控制理论 和 智能控制理论三个阶段。智能控制的典型实例是模糊全自动洗衣机等。自动控制系统可分为开环控制系统和闭环控制系统。一个
2021-07-01 10:01:17
PID的比例,积分,微分三个参数怎么确定呢?
2016-04-29 16:02:43
PID调节是自动控制领域的经典算法。主要有三个参数,即P:比例系数。I:积分系数。D:微分系数。在PID调节过程中我们需要知道两个值:1、系统当前状态值(即反馈),即电机转速的实际值。2、期望值。即
2021-09-07 06:38:00
比例环节先提高系统上升到稳态的时间。3.增加一个积分环节彻底消除稳态误差。4.增加一个微分环节彻底消除超调量。5.综合调整PID参数得到一个理想的输出结果。并不是每个系统都需要PID我觉得,有时候PI能
2016-01-29 16:50:21
pidf是pid的改进,有谁对这个比较了解吗?关于他的参数调整,其代码有人会写吗?
2018-12-22 11:02:45
Simulink中的PID控制器调整
2018-07-31 14:20:25
如何将labview中的模糊控制器和pid结合在一起,利用模糊化后自动调整pid的三个参数Kp、KI、Kd,做简单的仿真模拟呢?希望有简单的例子可以用来探讨。labview自带的例子只有单独的一个模块的运用,并没有将两者联合在一起的实例vi,会的人也可以可以私聊我或者直接回复,另有答谢啊!!
2020-03-26 08:54:34
本帖最后由 夜魄Y 于 2020-3-24 07:40 编辑
如何将labview中的模糊控制器和pid结合在一起,利用模糊化后自动调整pid的三个参数Kp、KI、Kd,做简单的仿真模拟呢?希望有简单的例子可以用来探讨。懂得人也可以可以私聊我或者直接回复,另有答谢啊!!!
2020-03-21 15:05:05
本帖最后由 夜魄Y 于 2020-3-24 07:41 编辑
如何将labview中的模糊控制器和pid结合在一起,利用模糊化后自动调整pid的三个参数Kp、KI、Kd,希望有简单的例子可以用来探讨。懂得人也可以互相讨论哦。
2020-03-17 08:41:43
如何将labview中的模糊控制器和pid结合在一起,利用模糊化后自动调整pid的三个参数Kp、KI、Kd,希望有简单的例子可以用来探讨。懂得人也可以互相讨论哦。
2020-03-19 10:34:29
PID控制器中输入P,I和D的值,取决于像P,PI或PID这样的控制器,如下所示。 PID控制器结构 PID控制器由三部分组成,即比例,积分和微分控制。这三个控制器的组合操作为过程控制提供了控制
2020-09-01 17:58:40
文章目录是什么是PID参数调整增量式PID是什么是PIDP:比例proportionalI:积分integralD:微分derivative参数调整Kp:比例系数:让偏差(目标减去当前)与调节装置
2022-01-20 06:44:16
什么是PID控制算法?PID控制算法C语言是如何实现的?特殊情况下的控制算法该如何去调整?比例、积分、微分三个环节的控制作用分别是什么?
2021-06-29 09:24:32
。当采用PID控制器还达不到工艺要求,则需要考虑其它的控制方案。如串级控制、前馈控制、大滞后控制等。5、公式:数值pid的计算:6、问题。Kp,ti,Td三个参数的设定是PID控制算法的关键问题
2019-05-30 08:30:00
【平衡小车】【串级PID参数整定】【详细版】根据现象手动调整平衡小车的PID简介:二轮平衡小车的控制分为平衡环(又称为直立环,保持稳定角度)、速度环(用来保持稳定时速度为零)以及转向环(用来无转向
2022-01-05 06:38:32
调节法的优缺点(好像这种方法只能给一个调节的大概位置,具体参数值还得继续做实验调出来)4、频率响应法设计PID参数的优缺点?5、以及还存在哪些高效实用的PID参数调节方法?热忱欢迎懂PID控制的知友讨论。上述问题如若表述有误,还请指出来修正。补充:暂且定一个标准:最大过调量小于10%,调整时间0.5秒以内!
2018-07-30 10:29:20
变量来求得,求出的输出值也就是PID参数KP,KI , KD的调整量,模糊控制表就是由这些调整量与输入量在一个表中按一定关系列出而得到的。由于KP, KI , KD这三个参数调整时是相互独立的,所以会
2016-02-01 10:25:56
请问Kp、Ki、Kd这三个常量的一般取值是多少?每个参数会对调整过程产生什么影响,取值过大或过小会怎么样?
2016-09-16 22:05:47
=sptr->LastError;sptr->LastError=Error; return Inc;在将KIKD 取0 的情况下 取了三个不同大小的KP效果如下:KP=0.1,KI=0
2019-07-17 02:49:16
这里面右面这个三个参数怎么设置
2019-07-17 05:35:06
( NETIF_FLAG_BROADCAST)是允许网卡广播,第二个参数(NETIF_FLAG_ETHARP)是允许使用ARP,那第三个参数(NETIF_FLAG_LINK_UP)是什么意思???
2019-07-19 04:35:49
四轴的串级pid调试,在调内环的时候,外环pid的三个参数是怎么设置?遥控器给的控制是给在外环上,那我现在要调节内环的参数,是应把外环pid的三个参数设置为0,还是什么?麻烦解答下,谢谢。
2019-08-06 03:56:06
控制器还达不到工艺要求,则需要考虑其它的控制方案。如串级控制、前馈控制、大滞后控制等。Kp,Ti,Td 三个参数的设定是 PID 控制算法的关键问题。一般说来编程时只能设定他们的大概数值,并在系统运行时
2020-02-23 07:00:00
PID控制器参数的优化整定一直是自动控制领域的研究热点。提出一种利用改进思维进化计算(MEC)优化PID控制器参数的方法,在原有算法的框架上,加入自调整操作,依据进化方向
2009-03-15 02:39:51 31
31 该文提出调整系统控制量的模糊 PID 控制器的计算机设计与仿真。以碱回收炉的水位控制为例具体论述调整系统控制量的模糊PID 控制器的设计、2-D 控制表的建立、以及控制器计算
2009-06-09 16:41:5220 本文针对用普通PID控制对VAV系统控制参数难以整定的问题,设计了一种基于模糊控制原理的PID参数在线自调整控制器,根据偏差和偏差变化率来实时调整p K , i K , d K 参数。通过
2009-08-07 09:50:1315 PID 控制器的稳定范围参数值:在工业控制上,大部分的控制器都是使用PID 控制器,而适当的调整PID 控制器参数遂便成极具挑战的工作,但是有哪些范围的PID数值可以使受控场(Plant)稳
2009-10-31 14:31:4945 针对网络控制系统中网络时延补偿的问题,提出了一种模糊自适应PID控制器的设计方法,通过利用在线时延估计方法对时延进行预估计,根据估计时延值在线调节PID三个参数,从而改善系
2010-07-13 16:05:218 PID控制是什么意思
目前工业自动化水平已成为衡量各行各业现代化水平的一个重要标志。同时,控制理论的发展也经历了古典控制理论、现代控制理论和智能控制理论三个
2009-04-10 12:40:5347422 在过程控制中,按偏差的比例(P)、积分(I)和微分(D)进行控制的PID控制器(亦称PID调节器)是应用最为广泛的一种自动控制器。
2012-01-13 17:14:0983 PID由于用途广泛、使用灵活,已有系列化产品,使用中只需设定三个参数(Kp, Ti和Td)即可。在很多情况下,并不一定需要全部三个单元,可以取其中的一到两个单元,但比例控制单元是
2012-01-16 10:59:26164 数字PID控制算法是将模拟PID离散化得到,各参数有着明显的物理意义,调整方便,所以PID控制器很受工程技术人员的喜爱。
2012-01-16 16:27:45903 网上找的PID的控制原理及手动调谐PID参数,我觉得写得不错,可以参考
2016-06-14 14:13:2621 PID控制最通俗的解释与PID参数的整定方法
2017-01-04 14:47:1544 增量式PID控制,数字PID控制算法的一种基本形式,是通过对控制量的增量(本次控制量和上次控制量的差值)进行PID控制的一种控制算法。
2018-02-26 14:57:3258339 PID是比例、积分、微分的简称,PID控制的难点不是编程,而是控制器的参数整定。参数整定的关键是正确地理解各参数的物理意义,PID控制的原理可以用人对炉温的手动控制来理解。阅读本文不需要高深的数学知识。
2018-05-31 08:40:4447 PID是一个闭环控制算法。因此要实现PID算法,必须在硬件上具有闭环控制,就是得有反馈。比如控制一个电机的转速,就得有一个测量转速的传感器,并将结果反馈到控制路线上,下面也将以转速控制为例。
2018-08-29 14:16:0118541 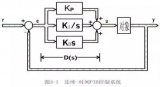
PID是一个闭环控制算法。因此要实现PID算法,必须在硬件上具有闭环控制,就是得有反馈。比如控制一个电机的转速,就得有一个测量转速的传感器,并将结果反馈到控制路线上,下面也将以转速控制为例。
2018-11-20 11:19:4622975 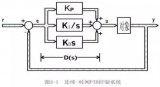
PID是一个闭环控制算法。因此要实现PID算法,必须在硬件上具有闭环控制,就是得有反馈。比如控制一个电机的转速,就得有一个测量转速的传感器,并将结果反馈到控制路线上,下面也将以转速控制为例。
2019-06-04 17:12:5211507 
PID控制中有P、I、D三个参数,只有明白这三个参数的含义和作用才能完成控制器PID参数整定,让控制器到达最佳控制效果。能熟练进行PID参数整定,将自动控制系统投自动,这代表着工程技术人员的自动化技能水平,但很多人并未真正掌握PID控制和PID参数整定。
2019-07-18 16:10:3235115 
PID三个字母是比例,积分,微分的英文首字母缩写。可见这三个功能在系统中都起作用,只是负责的功能不同。
2019-10-15 17:29:0043826 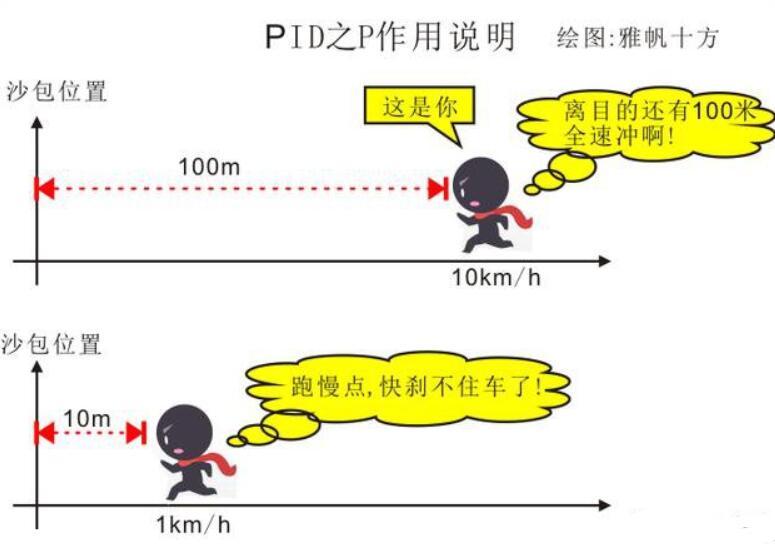
pid利用PI控制和PD控制的优点组合成的控制。PID运算是P、I和D三个运算的总和。
2019-11-29 15:04:2913903 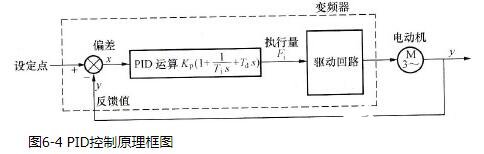
深入研究了PID控制理论,运用了多种方法设计了PID控制器。内容包括两个部分,其中第一部分为前四章,主要是关于单变量PID控制器的参数整定研究。
2019-12-04 08:00:0028 PID控制器除了上述Ke、Ti、Td三个参数外,还有采样周期Ts,其作用如下:
2020-07-21 10:15:1415818 
PID控制中有P、I、D三个参数,只有明白这三个参数的含义和作用才能完成控制器PID参数整定,让控制器到达最佳控制效果。能熟练进行PID参数整定,将自动控制系统投自动,这代表着工程技术人员的自动化技能水平,但很多人并未真正掌握PID控制和PID参数整定。
2020-08-31 09:34:526204 
在自动控制中,PID(Proportion-Integrationi-Differentiation:比例-积分-微分)控制算法在近一个多世纪以来在空城控制领域中占据了主导地位。它是由苏联工程师
2020-11-04 11:58:274736 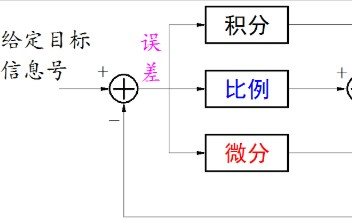
PID控制中有P、I、D三个参数,只有明白这三个参数的含义和作用才能完成控制器PID参数整定,让控制器到达最佳控制效果。能熟练进行PID参数整定,将自动控制系统投自动,这代表着工程技术人员
2020-12-25 17:24:0817609 PID 控制器结构清晰,参数可调,适用于各种控制对象, PID 控制器的核心思想是针对控制对象的控制需求,建立描述对象动态特性的数学模型,通过PID 参数整定实现在比例, 微分,积分三个方面参数调整的控制策略来达到最佳系统响应和控制效果,式子如下:
2021-03-12 17:40:4628 第一个重要参数是涓流阶段的低恒压值,第二个重要参数是第二阶段的高恒压值,第三个重要参数是转换电流。这三个重要参数与电池数目有关,与电池的容量Ah有关,与温度有关,与电池种类有关。
2021-04-09 08:57:482283 电子发烧友网为你提供要让PID控制到达最佳效果,要先明白P、I、D这三个参数的含义和作用资料下载的电子资料下载,更有其他相关的电路图、源代码、课件教程、中文资料、英文资料、参考设计、用户指南、解决方案等资料,希望可以帮助到广大的电子工程师们。
2021-04-21 08:40:597 PID控制中有P、I、D三个参数,只有明白这三个参数的含义和作用才能完成控制器PID参数整定,让控制器到达最佳控制效果。
2021-05-27 15:38:4095 作为经典的控制理论,PID控制规律仍然是当今工控行业的主导控制方式,无论复杂、简单的控制任务,PID控制都能取得满意的控制效果,前提是PID参数必须选择合适。可以说,通过适当的PID参数,PID控制
2021-06-01 10:28:0170 PID因稳定性极好现被广泛应用于工业过程控制领域。PID能改善系统在调节过程中的动态特性以及可以避免被控量的严重超调,具有抑制误差的作用,在一定的控制度下通过公式计算得到PID控制器的参数,在实际运行中进行最后调整与完善。
2021-10-11 10:19:4119920 PID控制中有P、I、D三个参数,只有明白这三个参数的含义和作用才能完成控制器PID参数整定,让控制器到达最佳控制效果。能熟练进行PID参数整定,将自动控制系统投自动,这代表着工程技术人员的自动化技能水平,但很多人并未真正掌握PID控制和PID参数整定。
2022-09-27 15:27:226248 PID控制器(比例-积分-微分控制器),由比例单元(Proportional)、积分单元(Integral)和微分单元(Derivative)构成,可以通过调整这三个单元的增益来调整其特性,如下图所示。PID控制器主要适用于基本上线性且动态特性不随时间变化的系统。
2022-11-03 11:43:511892 本文将详细介绍如何通过关注特定传感器参数来优化实时控制系统的数据捕获提供了三个技巧。
2022-12-22 14:20:171402 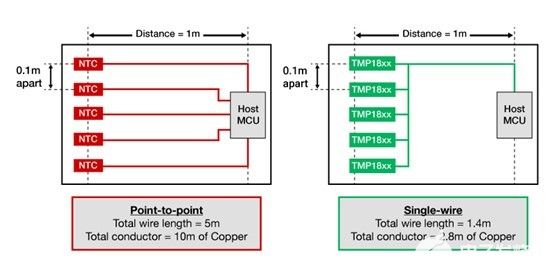
随着半导体工艺的发展,由导线引起的寄生效应产生的影响越来越大。三个寄生参数(电容、电阻和电感)对电路都有影响。
2023-02-13 10:38:029820 
PID,就是“比例(proportional)、积分(integral)、微分(derivative)”,是一种很常见的控制算法。
2023-02-14 15:06:2935150 PID控制规律及特点 PID控制器中的比例、积分、微分作用是通过比例系数K,、积分时DAC7624U间ri和微分时间Td这三个参数来实现的。所以,只要这三个参数选择的合适,就可以获得良好的控制质量
2023-03-09 14:12:088181 PID调节器是一种常见的控制系统,它可以通过对输入信号进行处理,控制输出信号来维持目标参数的稳定性。PID调节器的三个重要参数如下:
比例系数(P):比例系数是PID调节器中最基本的参数
2023-03-25 11:37:2725312 、流量计等。
调整参数:根据实际控制效果和要求,调整PID控制器的三个参数,即比例系数、积分时间和微分时间。
启动控制器:启动PID控制器,并观察控制器输出量的变化和控制效果。
2023-03-25 11:41:2221474 过程控制中有两个重要的算法PID反馈算法,卡尔曼状态估计算法。PID主要用来过程控制,卡尔曼滤波主要用来状态估计,比如预测运动轨迹之类的。
2023-06-29 10:41:274033 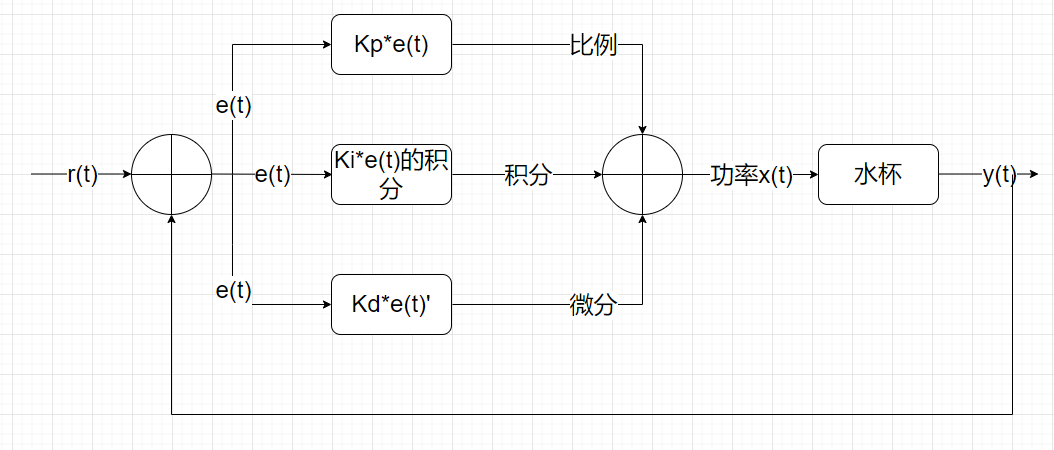
PSO(粒子群算法)在处理连续问题上有着较强的能力,因此很适合用来做参数优化,而PID控制器由三个参数组成,它们分别是:Kp 、Ki 、Kd 。
2023-07-20 14:20:426618 
力保持试验。 而要成功进行力保持试验,正确调整PID(比例-积分-微分)参数是至关重要的。本文科准测控小编将为您介绍如何在橡胶拉力测试机上正确调整PID参数,以解决这一问题。 一、PID控制的基本原理 在开始调整PID参数之前,首
2023-10-09 09:51:251356 
在Python中,range()是一个内置函数,用于生成一个整数序列。range()的三个参数分别代表起始值、终止值和步长。下面将详尽、详实和细致地解释这三个参数的含义。 起始值(start):指定
2023-11-21 14:47:4212827 PID调节是一种广泛用于工业控制系统中的反馈回路控制方法。通过调整比例(P)、积分(I)和微分(D)三个参数,可以有效地控制系统误差,提高系统的稳定性和响应速度。下面将详细介绍PID调节参数
2023-11-24 14:14:5556033 在计算机科学中,PID(进程标识符)是一个用于唯一标识运行中的进程的整数值。PID主要具有以下三个参数作用: 进程创建:PID参数用于在操作系统中创建新的进程。当操作系统启动一个进程时,会为其分配一
2024-01-16 14:56:3414053 参数对系统的影响。 一、PID控制原理 PID控制的基本原理是根据反馈信号来调整输出控制量,使得系统的实际输出与期望输出尽可能接近。 PID控制器的基本结构由三个分别对应于比例(Proportional
2024-01-22 15:35:009810 PID控制器非常实用且有效。它们基于简单的数学原理,通过调整三个参数(比例系数P、积分系数I和微分系数D)来对系统的偏差进行控制。这种简单性使得PID控制器易于理解和实现,同时也能够提供稳定且可靠的控制效果。
2024-04-12 11:06:282722 
器的核心在于通过调整比例(P)、积分(I)和微分(D)三个参数,实现对被控对象的精确控制。本文将详细探讨PID控制器中P、I、D的含义、作用及其在控制系统中的应用。
2024-06-05 15:30:4311740 在工业控制领域,PID(比例-积分-微分)控制算法以其简单实用、鲁棒性好、应用范围广等特点,成为了工程师们实现稳定、高效控制的首选方案。PID控制算法通过调整比例、积分和微分三个参数,对系统的偏差
2024-06-11 14:47:153404 比例(P)、积分(I)和微分(D)三个参数的调节,实现对系统输出的精确控制。 一、PID控制器的基本原理 比例控制(P控制) 比例控制是PID控制器中最基本的控制方式。其核心思想是通过比较系统的输出值
2024-06-30 10:41:442573 (Proportional)、积分(Integral)和微分(Derivative),这三个参数分别对应控制器的三种基本控制作用。 在PID控制器中,D代表微分(Derivative)控制,它是一种预测控制手段,用于预测系统的未来行为并进行相应的调整。微分控制的作用是快速响
2024-09-12 14:48:163110 单元(I)和微分单元(D)三个基本部分组成,通过调整这三个部分的参数(Kp、Ki、Kd)来实现对被控对象的精确控制。 PID控制器的原理 PID控制器的核心思想是根据系统当前的状态(即偏差)和过去的状态(即偏差的积分和微分),预测未来的状态,并据此调整控制量,使系统输出能够快速、准确地跟踪设
2024-11-06 10:27:124544 ),这三个参数共同作用于控制器,以实现对系统输出的精确控制。 一、PID控制器的组成 PID控制器由三个基本部分组成:比例项(P)、积分项(I)和微分项(D)。 比例项(P) :比例项是控制器输出与偏差(期望值与实际值之间的差)的直接比例。比例增益(Kp)越大,控制器对偏差的反应越
2024-11-06 10:28:442714 PID控制,即比例-积分-微分控制,是一种广泛应用于工业控制系统中的控制算法。它通过比例(P)、积分(I)和微分(D)三个参数的调整来实现对系统输出的精确控制。 PID控制的优点 简单易行 :PID
2024-11-06 10:33:106681 现代复杂系统的控制需求。 PID控制简介 PID控制是一种反馈控制算法,它通过调整系统的输入,以减少输出与期望值之间的偏差。PID控制器由三个主要部分组成:比例(P)、积分(I)和微分(D)控制器。比例控制器根据当前偏差的大小调整
2024-11-06 10:34:242443 PID调节器是一种广泛应用于工业控制系统中的控制器,它根据给定的参考值(设定值)和实际测量值(过程变量)之间的偏差来调整控制信号,以达到控制目标。PID调节器的名称来源于其三个基本控制动作:比例
2024-11-06 10:38:392700 ,从而提高焊接质量。 2. PID控制技术原理 PID控制技术由比例(P)、积分(I)和微分(D)三个基本环节组成。比例环节根据偏差的大小进行控制,积分环节消除稳态误差,微分环节预测偏差趋势,提前进行调整。PID控制器可以根据系统的实际响
2024-11-06 10:40:111574 在现代工业自动化控制系统中,PID控制器因其简单、高效而被广泛使用。PID控制器的三个参数——比例(P)、积分(I)和微分(D)——共同决定了系统的动态响应和稳定性。 PID控制器原理简述 PID
2024-11-13 14:31:3313822 在工业自动化领域,PID控制器因其简单、高效和广泛应用而备受青睐。PID代表比例(Proportional)、积分(Integral)和微分(Derivative)三个控制作用,它们共同作用于系统
2024-11-13 14:34:521877 PID控制器的名称来源于其三个核心控制参数:比例(Proportional)、积分(Integral)和微分(Derivative)。这三个参数共同作用于控制器的输出,以减少系统输出与设定值(参考值)之间的偏差。 比例(P)控制 :比例控制是PID控制的基础,它根据当前
2024-11-14 09:07:092436 PID控制(比例-积分-微分控制)是一种常见的反馈控制算法,广泛应用于工业控制系统中。在Python中实现PID控制,我们可以遵循以下步骤: 1. 理解PID控制原理 PID控制器有三个主要参数
2024-11-14 09:09:452182 的基础原理 伺服系统的参数调整本质是通过PID控制算法实现对机械系统的精确匹配。位置环、速度环、电流环的三环结构构成伺服控制的基础框架,其中位置环作为最外环决定最终定位精度,速度环影响动态响应特性,电流环则直接控
2025-10-13 07:41:34854 
应用三个维度展开分析。 一、PID控制的基本原理与变频器实现 PID(比例-积分-微分)控制是一种通过误差反馈实现系统调节的经典算法。在变频器中,PID控制通过以下方式作用于电机: 1. 比例环节(P):实时响应偏差信号,偏差越大,输出
2025-12-06 07:39:461513
 电子发烧友App
电子发烧友App








 工商网监
工商网监
评论