 通过位置跟踪模型演示PID三个参数
通过位置跟踪模型演示PID三个参数

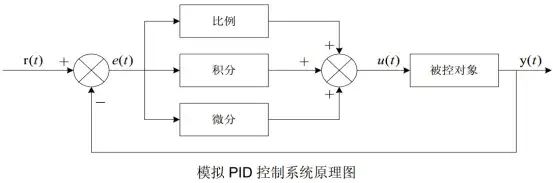
在自动控制中,PID(Proportion-Integrationi-Differentiation:比例-积分-微分)控制算法在近一个多世纪以来在空城控制领域中占据了主导地位。它是由苏联工程师Minorsky在1922年在研究舰船自动控制领域分析中提出的算法。
PID控制算法是通过受控对象的实际行为和目标之间的误差,通过比例-微分-积分运算再重新作用在被控对象。
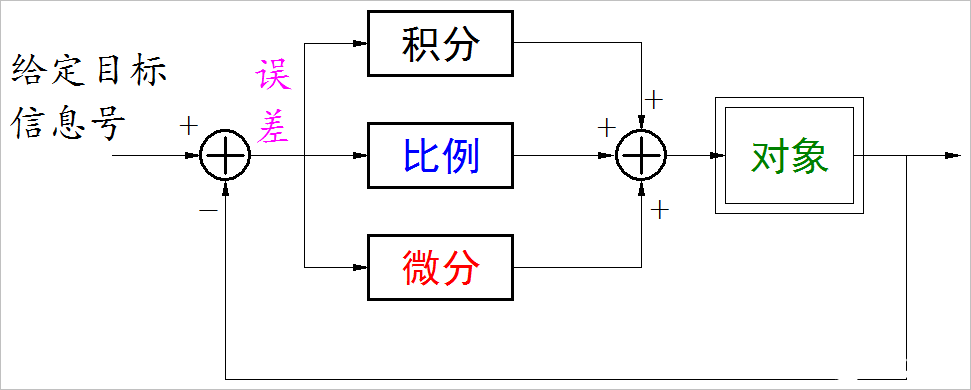
▲ PID控制算法
在工业控制中,PID控制器可以通过模拟、数字方式实现。如今工业应用中的98%以上的过程控制、95%以上的运动控制还都是用这PID控制算法。
对于初学者,掌握PID控制算法参数调整非常重要。下面是来自于公众号“芯片之家”中的一个推文,其中使用了一个视频来演示了PID控制在位置跟踪系统中的应用。
位置跟踪系统的控制对象是驱动直流电机的电压,经过电机旋转带动机械运动。
▲ 一个位置跟踪PID控制系统
将驱动电机进行简化,考虑它的转速与施加电压成正比,因此转动角度位置就是转速的积分。所以对象是一个一阶积分惯性系统。
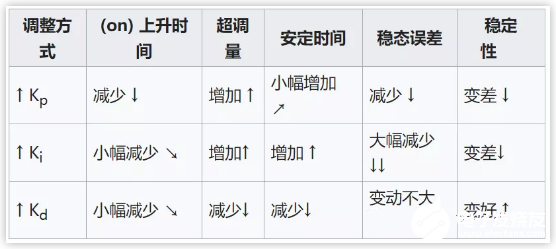
使用普通的比例控制就可以完成无误差跟踪随着比例系数增加,跟踪速度也会提高,但是也会出现过冲震荡现象。
▲ 只使用比例控制的情况
加入位置的微分(也就是转速)项可以消除震荡。如果微分项过大,会使得位置跟踪变缓慢。特别由于静摩擦力的存在,有可能会使得位置跟踪出现小的偏差。
▲ 加入微分项,可以消除震荡
加入积分项,可以将由于系统的静态摩擦所产生的位置偏差彻底消除。但也会增加系统的震荡倾向。
所以此时需要综合调整积分、微分的比例系数。
▲ 只使用I,D控制的效果
综合调整PID的系数,可以使得系统跟踪既快又稳。
在很多教科书中也会给出一定的调整顺序,或者给出通过系统的单位阶跃响应曲线来定量计算最优的PID参数方法。
▲ 综合利用PID达到快速稳定的效果
了解到PID参数与系统误差之间的物理联系,是实际中应用PID调节的重要环节。
▲ PID控制效果
责任编辑:haq
-
PID
+关注
关注
38文章
1505浏览量
91898 -
自动控制
+关注
关注
10文章
722浏览量
46576
发布评论请先 登录
SPE协议芯片如何让工业布线瘦身70%?三个实战案例告诉你
变频器内置PID控制参数的含义

变频器PID参数设置步骤

定华雷达仪表学堂:不适合安装雷达物位计的三个位置
变频器pid怎么启用

PID控制的算法
CW32L012的PID温度控制——算法基础
怎样理解变频器内置PID控制参数的含义
常用伺服参数的调整




评论