 如何使用Python实现PID控制
如何使用Python实现PID控制

PID控制(比例-积分-微分控制)是一种常见的反馈控制算法,广泛应用于工业控制系统中。在Python中实现PID控制,我们可以遵循以下步骤:
1. 理解PID控制原理
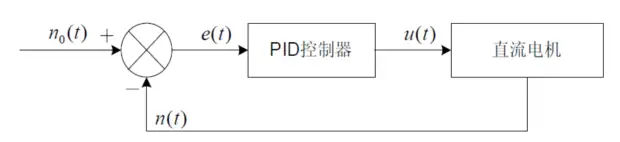
PID控制器有三个主要参数:比例(P)、积分(I)和微分(D)。控制器的输出是基于这三个参数的加权和计算得出的:
- 比例(P) :误差的当前值,即设定值与实际值之间的差。
- 积分(I) :误差随时间的累积,用于消除稳态误差。
- 微分(D) :误差的变化率,用于预测误差的未来趋势。
PID控制器的输出公式为:
[ u(t) = K_p e(t) + K_i int e(t) , dt + K_d frac{de(t)}{dt} ]
其中,( u(t) ) 是控制器的输出,( e(t) ) 是误差,( K_p )、( K_i ) 和 ( K_d ) 分别是比例、积分和微分增益。
2. Python实现
在Python中,我们可以定义一个PID控制器类,包含初始化参数、误差更新和控制器输出计算等功能。
class PID:
def __init__(self, kp, ki, kd, set_point):
self.kp = kp
self.ki = ki
self.kd = kd
self.set_point = set_point
self.integral = 0
self.last_error = 0
def update(self, current_value):
error = self.set_point - current_value
self.integral += error
derivative = error - self.last_error
output = self.kp * error + self.ki * self.integral + self.kd * derivative
self.last_error = error
return output
def set_set_point(self, set_point):
self.set_point = set_point
def reset(self):
self.integral = 0
self.last_error = 0
3. 使用PID控制器
以下是一个简单的示例,展示如何使用上述PID类来控制一个模拟系统。
# 假设我们有一个简单的系统,其输出与输入成正比
def system_dynamics(input_value):
return input_value * 0.5 # 假设系统响应是输入的一半
# 创建PID控制器实例
pid = PID(kp=0.1, ki=0.01, kd=0.05, set_point=10)
# 模拟控制过程
for _ in range(100):
current_value = system_dynamics(pid.last_output) if hasattr(pid, 'last_output') else 0
control_signal = pid.update(current_value)
pid.last_output = control_signal # 记录上一次的输出,用于下一次计算
print(f"Set Point: {pid.set_point}, Current Value: {current_value}, Control Signal: {control_signal}")
4. 调整PID参数
PID控制器的性能很大程度上取决于参数的调整。通常需要通过实验或使用参数调整技术(如Ziegler-Nichols方法)来找到最佳的( K_p )、( K_i ) 和 ( K_d ) 值。
5. 考虑实际应用
在实际应用中,PID控制器可能需要处理噪声、延迟和非线性等问题。这可能需要更复杂的实现,例如添加滤波器来减少噪声的影响,或者使用更高级的控制策略。
6. 性能评估
评估PID控制器的性能通常涉及到稳定性、响应时间和超调等指标。可以通过模拟或实际运行系统来收集数据,并使用这些数据来评估和调整控制器。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
PID控制
+关注
关注
11文章
465浏览量
42746 -
工业控制
+关注
关注
38文章
1728浏览量
92512 -
python
+关注
关注
59文章
4893浏览量
90517
发布评论请先 登录
相关推荐
热点推荐
高压变频器PID闭环调节功能实现及优化
高压变频器的PID闭环调节功能是实现生产过程自动化、恒压供水、恒温控制及节能降耗的核心技术手段。其本质是通过对偏差信号的比例、积分、微分运算,动态调整电机转速,使压力、流量等物理量精确跟随设定值

使用Python/MyHDL创建自定义FPGA IP
使用 Python/MyHDL 创建自定义 FPGA IP,与 Vivado 集成,并通过 PYNQ 进行控制——实现软件上的简单硬件设计。

变频器内置PID控制参数的含义
变频器内置PID控制是工业自动化领域中的关键技术之一,广泛应用于电机调速、温度控制、压力调节等场景。PID控制通过比例(P)、积分(I)、微

变频器PID参数设置步骤
变频器PID控制是工业自动化领域中实现精确调节的关键技术之一,其核心在于通过比例(P)、积分(I)、微分(D)三个参数的协同作用,实现对电机转速、压力、流量等物理量的闭环

变频器pid怎么启用
变频器PID调试是工业自动化控制中的关键环节,其核心在于通过比例(P)、积分(I)、微分(D)三个参数的动态调整,实现被控量(如压力、温度、流量等)的快速稳定控制。以下从调试原理、步骤

PID控制的算法
PID及其衍生算法是应用最广泛的算法之一,是当之无愧的万能算法,如果能够熟练掌握PID算法的设计与实现过程,对于一般的研发人员来讲,应该是足够应对一般研发问题了,而难能可贵的是,在我所接触的控
发表于 01-23 08:18
请问如何优化PID控制器的参数以实现快速响应和减少超调?
PID控制器在电机控制中起着关键作用。如何根据电机的特性和应用需求调整PID控制器的参数(如比例系数、积分系数和微分系数),以
发表于 12-08 06:15
怎样理解变频器内置PID控制参数的含义
变频器内置PID控制参数是工业自动化领域中实现精确控制的核心要素,其合理配置直接影响电机调速、压力调节、温度控制等过程的稳定性和响应速度。要
CW32电机控制基础——PID控制原理
将偏差的比例(Proportion)、积分(Integral)和微分(Differential)通过线性组合构成控制量,用这一控制量对被控对象进行控制,这样的控制器称
扫描电机的PID恒速控制仿真及实验
数学模型,并通过 Matlab Simulink 搭建了仿真模型。提出了使用增量式PID控制算法实现电机的恒速控制,并进行了仿真,最后,利用STC89C52将
发表于 06-16 21:53
一步到位,Moku数字PID控制器实现系统实时调节与验证
PID控制被广泛应用于实验控制和工业自动化系统中,但在实际调试中,传统的PID控制器往往需要大量计算与经验积累,调节过程既繁琐又耗时。而通过




评论