 如何调节PID参数 PID控制器的调试方法
如何调节PID参数 PID控制器的调试方法

在现代工业自动化控制系统中,PID控制器因其简单、高效而被广泛使用。PID控制器的三个参数——比例(P)、积分(I)和微分(D)——共同决定了系统的动态响应和稳定性。
PID控制器原理简述
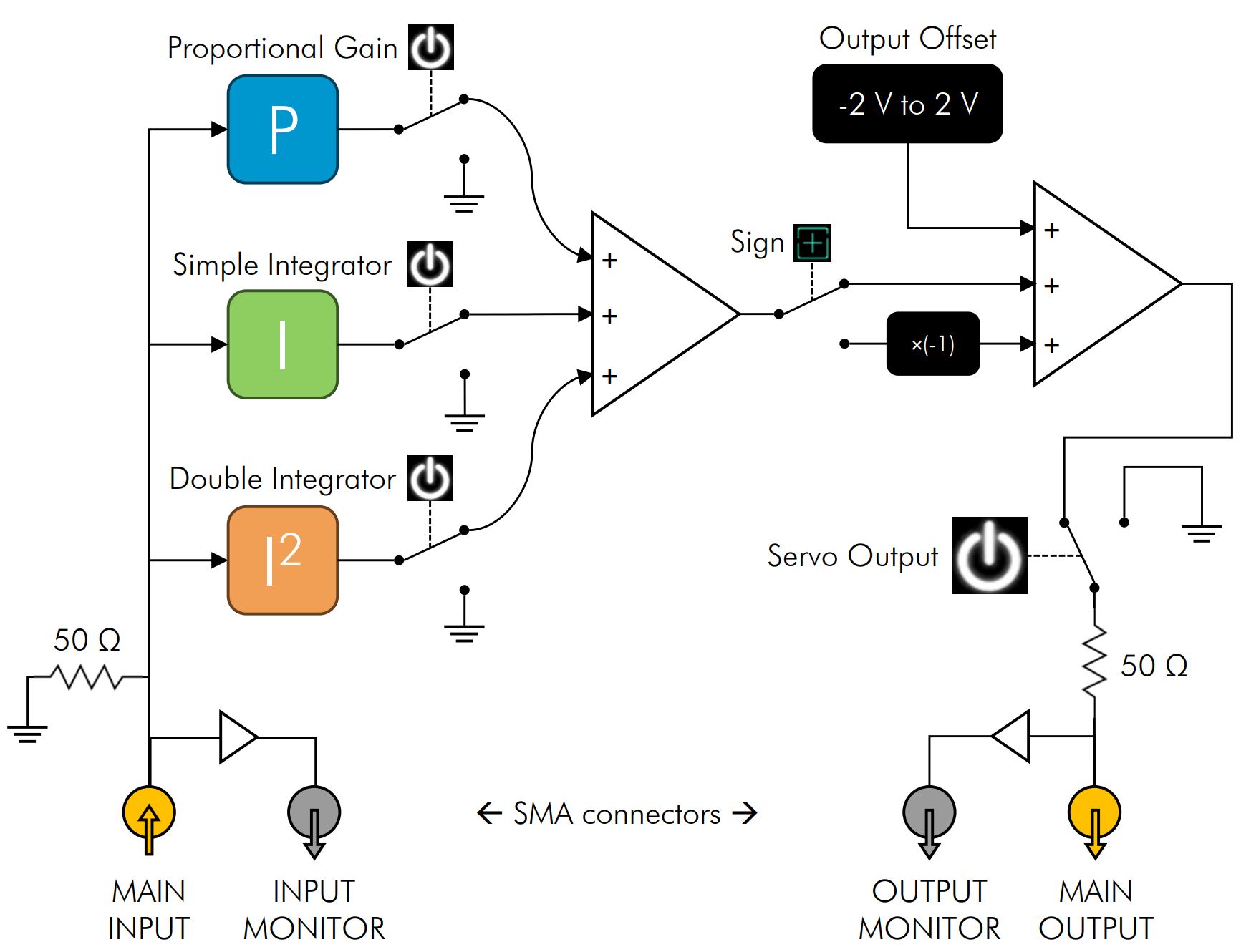
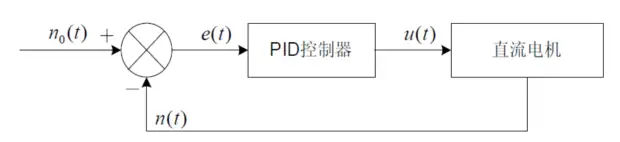
PID控制器通过计算误差信号(期望值与实际值之差)的比例、积分和微分来调整控制量,以减少误差并实现系统的稳定。比例项(P)对当前误差进行响应,积分项(I)对过去累积的误差进行响应,而微分项(D)则预测未来误差的变化。
调节PID参数的基本步骤
- 比例(P)参数调节 :
- 首先,将积分(I)和微分(D)参数设置为0,只保留比例项。
- 逐渐增加P值,直到系统出现振荡,记录此时的P值。
- 将P值设置为振荡时P值的60%左右,以避免过大的超调。
- 积分(I)参数调节 :
- 在P参数调定后,逐渐增加I值,观察系统响应。
- I参数的增加会减少稳态误差,但过大的I值可能导致系统响应变慢或不稳定。
- 微分(D)参数调节 :
- 在P和I参数调定后,增加D值可以减少系统的超调和振荡。
- D参数对系统的动态性能有显著影响,但过大的D值可能导致噪声放大。
PID控制器的调试方法
- 开环测试 :
- 在没有反馈的情况下,对系统进行开环测试,以了解系统的基本动态特性。
- 闭环测试 :
- 在闭环条件下,逐步调整PID参数,观察系统响应,并记录不同参数下的性能。
- 临界比例增益法 (Ziegler-Nichols方法):
- 通过逐步增加P参数,直到系统开始振荡,记录此时的增益值,然后根据Ziegler-Nichols公式计算I和D参数。
- 衰减曲线法 :
- 通过观察系统在不同P参数下的衰减曲线,确定系统的临界增益和时间常数,进而计算PID参数。
- 模拟退火法 :
- 利用模拟退火算法在参数空间中搜索最优的PID参数组合。
- 遗传算法 :
- 通过模拟自然选择和遗传机制,优化PID参数。
调试过程中的注意事项
- 系统稳定性 :
- 在调节参数时,始终确保系统的稳定性,避免因参数设置不当导致系统失控。
- 参数的相互作用 :
- 认识到P、I、D参数之间存在相互作用,一个参数的调整可能会影响到其他参数的效果。
- 系统响应的非线性 :
- 考虑到实际系统可能存在非线性特性,PID参数的调节需要根据实际情况进行调整。
- 环境干扰 :
- 在调试过程中,考虑到环境因素和外部干扰对系统性能的影响。
- 参数的微调 :
- 在初步调节后,进行微调以优化系统性能,达到更精细的控制效果。
结论
PID控制器的参数调节是一个复杂且需要细致操作的过程。通过理解PID控制器的工作原理,掌握基本的调节步骤和调试方法,工程师可以有效地调节PID参数,实现对系统的精确控制。在实际应用中,可能需要结合多种方法和多次迭代来找到最佳的PID参数设置。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
控制器
+关注
关注
114文章
17931浏览量
196015 -
PID
+关注
关注
38文章
1510浏览量
92260 -
参数
+关注
关注
11文章
1870浏览量
34092 -
工业自动化
+关注
关注
17文章
3325浏览量
70206
发布评论请先 登录
相关推荐
热点推荐

解读PID参数自整定的实验过程
在自动化控制领域,PID调节器几乎是绕不开的核心环节。然而,很多工程师在实际项目中都会遇到同一个难题:比例、积分、微分这三个参数到底该怎么调?手动试凑不仅耗时费力,效果还往往差强人意。


变频器PID参数设置步骤
变频器PID控制是工业自动化领域中实现精确调节的关键技术之一,其核心在于通过比例(P)、积分(I)、微分(D)三个参数的协同作用,实现对电机

变频器pid怎么启用
变频器PID调试是工业自动化控制中的关键环节,其核心在于通过比例(P)、积分(I)、微分(D)三个参数的动态调整,实现被控量(如压力、温度、

PID控制的算法
的偏差有关,这样就大大提高了系统的稳定性。需要注意的是最终的输出结果应该为
u(K)+增量调节值;
PID的离散化过程基本思路就是这样, 从而实现微控制器的控制作用。
发表于 01-23 08:18
PID调参实用方法
方法,最终所展示出来的温度曲线是极其不稳定的,他会由于控制器件的灵敏程度、加热头的性能等等原因,导致最终的温度曲线会在目标周围震荡,达不到理想的控制效果,就像下图:实际曲线(黑线) 在 目标曲线(红线
发表于 11-28 07:17
Aerodiode高带宽激光锁定PID控制器
。 PID-C型激光锁定PID控制器专为实现宽达30MHz控制带宽内的最低噪声水平而设计。该设备采用触屏控制(无需电脑)的模块化设计,集成了

一步到位,Moku数字PID控制器实现系统实时调节与验证
PID控制被广泛应用于实验控制和工业自动化系统中,但在实际调试中,传统的PID控制器往往需要大量




评论