 TogetherROS系统更新和CPU调频策略配置
TogetherROS系统更新和CPU调频策略配置

系统更新
第二个配置,是更新当前旭日X3派所使用的Ubuntu镜像,和在电脑上使用的命令相同。
我们更新一下当前的系统镜像:
$ sudo apt update #会按照当前软件源的域名设置去连接远程软件源
$ sudo apt full-upgrade #升级所有可以升级的软件包
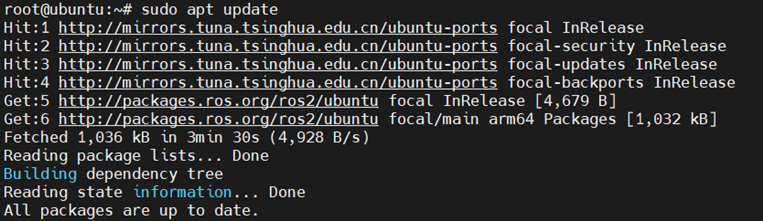
弹出如下对话,我们选择“Y”,回车;

这样我们就完成了对系统更新的检查,并安装好了更新包。
CPU调频策略
第三个配置,设置CPU的调频策略,这是一个可选项,大家了解之后,在未来需要使用的时候进行配置即可。
动态调频 $ echo > ondemand /sys/devices/system/cpu/cpufreq/policy0/scaling_governor #让系统根据当前负载,动态调整CPU频率
满频模式 $ echo > performance /sys/devices/system/cpu/cpufreq/policy0/scaling_governor #让CPU始终以满频,也就1.2GHz的频率工作
打开超频 $ echo 1 > /sys/devices/system/cpu/cpufreq/boost #使CPU以超频,也就是1.5GHz的频率工作
关闭超频 $ echo 0 > /sys/devices/system/cpu/cpufreq/boost
这里CPU频率为,满频模式:1.2GHz,超频模式:1.5GHz。

大家需要注意,默认的系统配置是关闭超频、并且动态调频的配置。这样可以比较好地保证功率最优。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
31395浏览量
223554 -
cpu
+关注
关注
68文章
11324浏览量
225836 -
Ubuntu
+关注
关注
5文章
616浏览量
33644 -
ROS
+关注
关注
1文章
296浏览量
18859
发布评论请先 登录
相关推荐
热点推荐
Cyclone IV器件的配置和远程系统更新
本章节介绍了 Cyclone® IV 器件的配置和远程系统更新。Cyclone IV (Cyclone IV GX和 Cyclone IV E)器件使用 SRAM 单元存储配置数据。由
发表于 11-14 10:13
HCI连接更新和加密程序
你好,我正在评估HCI模式下的CY5676A进程256KB模块。我试图从同一个设备同时发送两个控制程序;连接更新和加密;该设备处理连接更新命令并发送请求LLyCalnFutsUpDATE.IN,在到
发表于 10-24 16:40
【米尔MYD-J1028X开发板试用体验】体验米尔MYD-J1028X开发板 NXP LS1028A处理器 CPU调频策略
系统:查看MYC-J1028X开发板设置CPU调频策略指令:root@forlinx:/# cat /sys/devices/system/cpu
发表于 10-07 18:47
嵌入式学习板-ElfBoard ELF 1 固定CPU频率的方法
图形化界面配置Linux内核的CPU调频策略:
需要先执行“make imx6ull_elf1_defconfig”命令生成.config,然后再使用图形界面进行
发表于 10-25 09:47
双馈风电机组一次调频策略
针对双馈风电机组( DFIGs)不具备调频控制能力的问题,设计DFIG -次调频控制策略,实现了DFIG参与电网一次调频。研究DFIG功率控制原理和频率响应过程,并考虑虚拟惯量、频率下
发表于 12-28 15:35
•2次下载
使用DRaaS测试操作系统更新和新代码版本
几乎每个数据中心都需要测试操作系统更新和新代码版本。采用DRaaS解决方案就可以满足需求。问题是这些测试需求需要一个正在测试的服务器的副本以及最新的数据副本。
linux CPU是这样动态调频
针对sep4020的linux低功耗研究也有一段时间了,基本把低功耗的实现方式想清楚了(主要分成机制和策略),这段时间的工作主要在机制上。暂时想实现的主要的机制有:cpu级,设备驱动级,系统平台级。管理颗粒度不断递增,形成三驾马
发表于 04-22 17:26
•2108次阅读

如何实现远程FPGA的更新和重启
如今, 大多数通讯系统均将FPGA作为其产品解决方案, 且已有大量FPGA应用到通讯系统之中。为了达到降低系统维护的成本的目的,我们就需要实现FPGA远程更新重启
发表于 07-10 16:01
•22次下载
TogetherROS Bot相机驱动方法
TogetherROS™·Bot相机驱动 除此之外,TogetherROS™·Bot中也提供了USB摄像头的驱动节点,连接摄像头之后,直接设置设备的权限和TogetherROS的环境变量就可以使用了
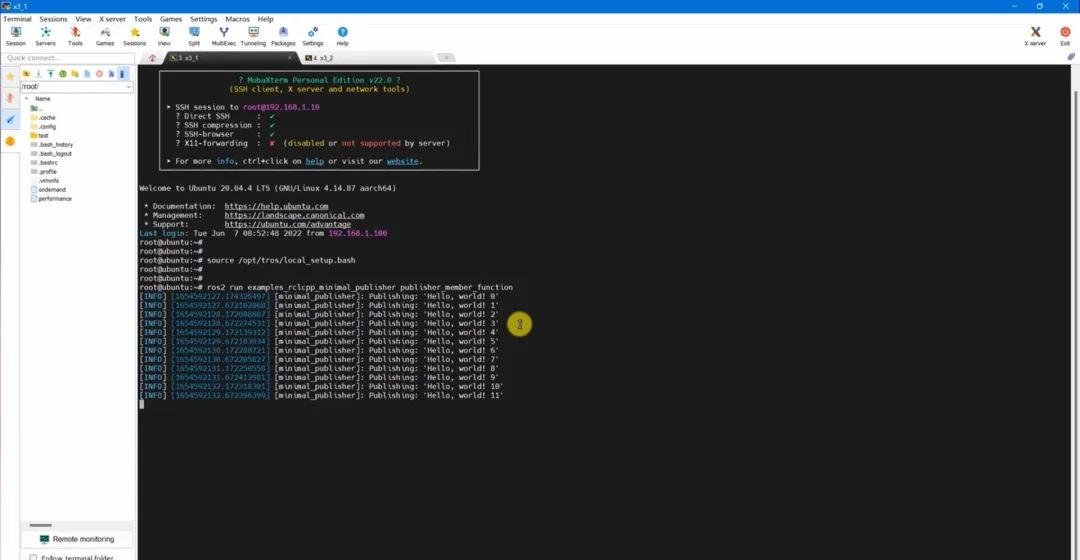
TogetherROS系统的通信功能测试
通信测试 先来测试一下TogetherROS™·Bot系统的通信功能。 我们需要启动两个终端,分别连接到旭日X3派上,并分别按以下命令配置环境变量。 终端1: ** source /opt/tros
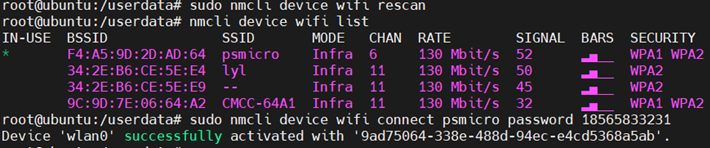
TogetherROS系统中如何配置网络连接
无论是旭日X3派,还是TogetherROS,在正式使用之前,都还需要进行一些必要的配置,完善必要的功能模块,提供完整的算力支持,达到最佳状态。 网络连接 第一个配置,是无线网络连接。 当然,大家也
华为云 X 实例 CPU 性能测试详解与优化策略
分析 3.2 CPU性能瓶颈分析 4. CPU性能优化策略 4.1 优化CPU性能的常用方法 4.2 操作系统内核调优
华纳云服务器Linux系统电源管理与节能优化配置方法
在云计算时代,Linux系统的电源管理优化成为提升云服务器能效的关键环节。本文将深入解析Linux内核的电源管理机制,从CPU调频策略到磁盘休眠设置,提供一套完整的节能



评论