 扫地机全域马达驱动系统电路设计与EMC兼容优化
扫地机全域马达驱动系统电路设计与EMC兼容优化

智能扫地机器人为典型多电机协同移动机器人平台,整机集成行走轮BLDC、高速吸尘风机BLDC、滚刷、边刷等多路动力马达,不同电机高频启停、负载突变、高速开关工作特性,使驱动板成为整机电磁干扰的主要发射源与敏感接收源。多通道功率驱动叠加、PWM高频开关噪声、电机反向电动势、地弹扰动、线束辐射等问题,极易引发整机EMI超标、导航陀螺仪漂移、雷达测距异常、低速行走抖动、风机啸叫等量产通病。
本文以扫地机全域马达驱动系统为研究对象,系统性阐述多电机混合驱动硬件电路架构、功率拓扑选型、电源系统、采样与传感电路、驱动保护电路设计方案。针对扫地机量产高频EMC问题,从干扰机理、传导抑制、辐射屏蔽、接地策略、PCB布局、端口防护六个维度提出整套工程化优化方案,满足GB/T 4343.1、GB/T 17625.1及EN55032 Class B家用设备电磁兼容标准,可为新一代高可靠、低噪声、可量产扫地机驱动硬件设计与EMC整改提供完整技术依据。
1 引言
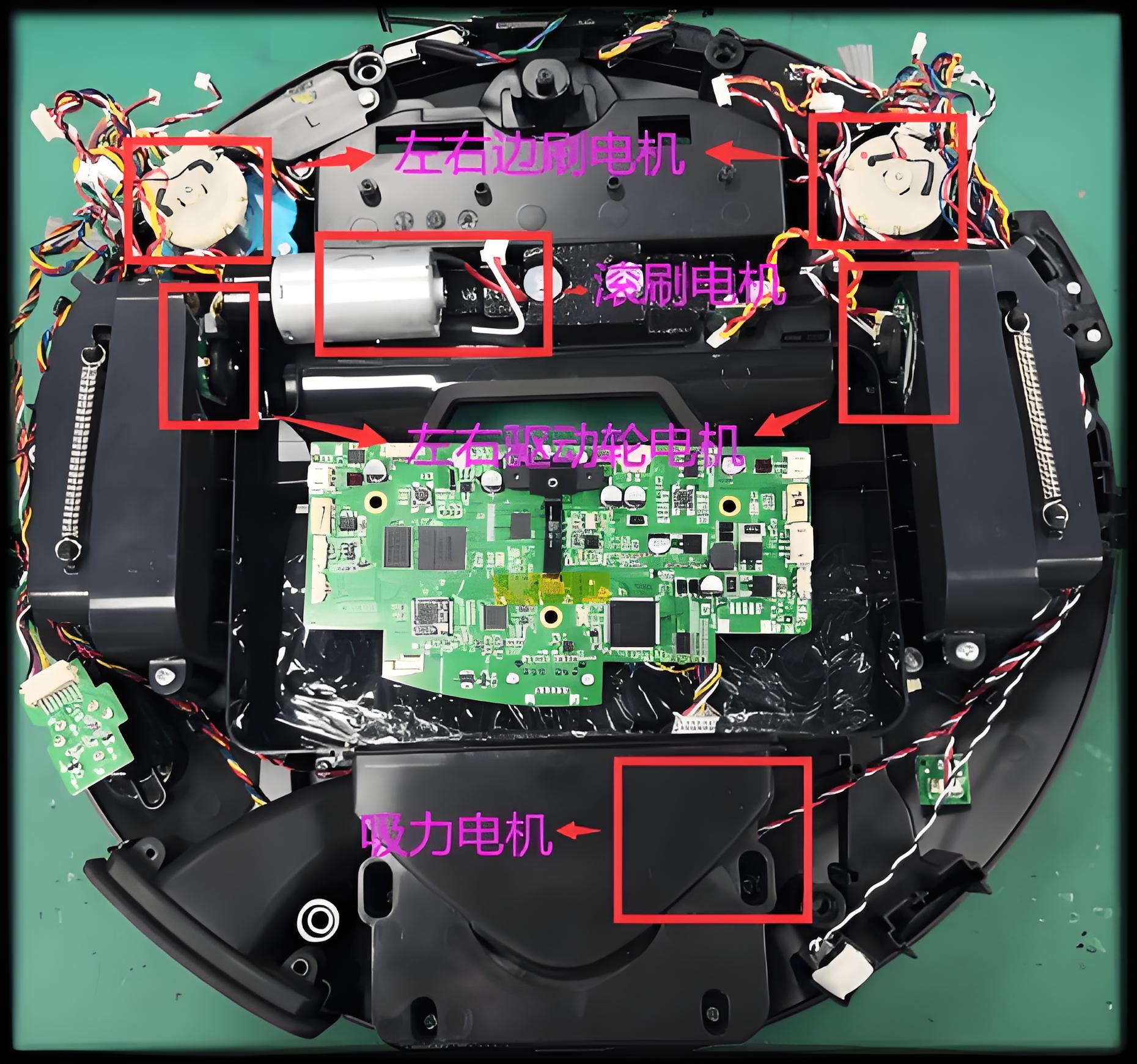
现代智能扫地机逐步实现全场景自主清扫、智能越障、自适应吸力调节、静音运行等功能,整机动力系统由多路差异化马达组成:左右行走电机负责底盘运动与差速转向,高速风机提供负压吸尘,滚刷、边刷完成地面杂物清扫。多电机同时工作时,高频PWM开关、功率管快速通断、电机感性负载续流,会产生大量瞬态尖峰、谐波电流与高频辐射干扰。
相较于单电机设备,扫地机多马达全域驱动系统存在干扰叠加、强弱电混杂、线束长、传感器密集等特点,EMC问题更为突出。若电路设计与布局缺乏系统性抗扰设计,极易出现传导骚扰超标、辐射干扰超标、整机信噪比下降、导航精度漂移等问题,严重影响产品认证通过率与终端用户体验。因此,在驱动电路设计阶段同步嵌入EMC设计逻辑,是解决扫地机量产电磁兼容问题的核心手段。
本文结合扫地机工况特性,搭建全域马达驱动硬件电路体系,解析各类电机适配拓扑,并针对传导、辐射、静电、浪涌、地扰动等典型EMC问题,给出从器件、电路、PCB到整机布线的全链路优化方案。
2 扫地机全域马达驱动系统总体架构
扫地机全域马达驱动板系统采用分级电源+多拓扑混合驱动+独立采样+全域防护架构,根据电机类型差异化匹配驱动方案,兼顾控制性能、硬件集成度与EMC抗扰能力,整体分为电源层级、主控层级、功率驱动层级、传感采样层级、EMC防护层级五大模块。
系统供电由锂电池输入,经防反接、防浪涌、输入滤波后进入多级DC-DC与LDO稳压,分别为功率驱动、主控、传感器、编码器独立供电,实现强弱电电源解耦。主控通过高级定时器输出多路互补PWM信号,经预驱芯片放大后驱动三相全桥/MOS H桥功率拓扑,实现BLDC与有刷电机的FOC矢量控制与调速控制。同时通过高精度电流采样、磁编码器角度采样形成闭环控制,配合硬件保护与EMC防护电路,实现全域马达稳定、低干扰运行。
3 全域马达驱动核心电路设计
3.1 输入电源与防干扰电路设计
电池输入端是整机传导干扰的主要进出通道,也是EMC整改的关键位置。扫地机电池电压随电量动态跌落,且电机频繁启停会导致母线电流剧烈波动,必须设计高稳定性、高抗扰输入电源电路。
输入前端集成防反接、防浪涌、多级滤波电路:采用P沟道MOS管实现零压降防反接保护,避免电池接反烧毁整机电路;输入端并联TVS管抑制整机浪涌与瞬态高压尖峰;配置大容量电解电容与高频陶瓷电容组合滤除高低频纹波,配合共模电感、X电容、Y电容构成π型滤波网络,大幅抑制驱动系统向电池母线反向传导的高频谐波噪声,满足传导骚扰限值要求。
电源层级采用分级隔离稳压策略:动力电池母线直接为功率驱动回路供电,独立DC-DC输出5V为预驱、采样电路供电,再经低噪声LDO输出3.3V为MCU、编码器、导航传感器等精密模拟电路供电,彻底隔离功率侧噪声与信号侧精密电路,避免电源串扰引发的控制异常。
3.2 差异化功率驱动拓扑电路
针对扫地机四类马达工况差异,采用差异化功率拓扑设计,实现性能与EMC特性平衡。
行走轮、吸尘高速BLDC电机采用预驱+三相全桥MOS拓扑,专用电机预驱芯片内置死区控制、栅极驱动稳压与硬件防直通逻辑,可有效降低开关振荡与谐波噪声。低内阻N沟道MOS管大幅降低导通损耗与发热,适配高频PWM驱动与高速弱磁FOC控制,减少高速工况下的电磁啸叫与辐射干扰。
滚刷、边刷有刷电机采用集成H桥驱动拓扑,电路简洁、可靠性高,可实现正反转、调速、刹车与滑行控制,适配负载突变、毛发缠绕、频繁堵转的清扫工况。集成驱动芯片内部集成续流、过流限制功能,可减少外部续流二极管与RC吸收电路数量,简化EMC整改难度。
3.3 电流采样与角度传感电路
FOC控制精度与低速稳定性依赖高精度采样,同时采样电路的抗扰设计直接决定闭环控制可靠性。三相相电流采用高精度低温漂采样电阻,配合运放差分放大电路采集电流信号,差分采样可有效抑制共模干扰,提升电流采样信噪比。
行走电机配置MT6835 21位AMR磁编码器,通过SPI高速通信实现绝对角度采集。编码器信号属于弱信号精密走线,电路设计上串联磁珠、并联小容量滤波电容,同时预留ESD防护器件,防止静电干扰与高频串扰导致的角度丢数、跳变问题,保障低速行走平顺性。
3.4 全域硬件保护电路
为适配清扫复杂工况,驱动系统搭建硬件优先、软件兜底的全维度保护机制,同时减少故障工况下的高频异常干扰。电路集成过流、欠压、过压、过热、堵转、续流吸收保护:功率回路增加RC缓冲电路,吸收电机换向与启停产生的反向电动势尖峰,抑制高频振荡干扰;NTC热敏电阻实时监测功率板温度,高温时自动降功率或停机;电流异常时硬件快速闭锁PWM输出,避免功率器件频繁开关产生的杂散干扰。
4 扫地机驱动系统典型EMC干扰机理分析
扫地机马达驱动系统EMC问题主要集中在传导骚扰超标、辐射骚扰超标、静电干扰、地弹噪声串扰四大类,根源均来自多电机高频开关特性与整机密集布局。
一是功率器件高频开关产生高频方波谐波,通过电池母线向外传导,造成低频段传导骚扰超标;二是电机线束为长天线结构,高频开关噪声通过线束向外辐射,导致整机辐射超标;三是电机感性负载通断产生反向电动势与电压尖峰,引发电路振荡与杂散噪声;四是多路功率回路大电流动态变化引发地电位漂移、地弹噪声,干扰陀螺仪、雷达、编码器等精密传感器,造成导航漂移、行走偏移;五是人机接触、运输工况引发静电放电,干扰弱电信号导致系统死机、复位、信号异常。
5 全域EMC兼容优化设计方案
5.1 传导干扰抑制方案
针对电源端口传导超标问题,采用前端π型滤波+分路谐波抑制方案。输入端口配置共模电感抑制共模干扰,X电容滤除差模干扰,Y电容泄放高频对地噪声;大功率吸尘风机回路增加独立RC吸收网络,抑制高速开关谐波;优化PWM调制策略,采用对称互补PWM与随机调频技术,打散集中频点噪声,降低谐波峰值,满足GB/T 17625.1谐波电流限值要求。
5.2 辐射干扰抑制方案
辐射干扰核心优化思路为缩短高频走线、减少天线效应、屏蔽隔离。电机三相输出线串联10Ω阻尼电阻与100nF电容组成RC缓冲电路,抑制MOS开关瞬间电压振荡与尖峰;所有功率线束尽量缩短,避免长线辐射;编码器、通信信号线采用屏蔽线,屏蔽层单端接地;功率区域与传感器区域物理间距保持10mm以上,避免高频空间耦合干扰。
5.3 静电与瞬态干扰防护
所有对外接口、信号接口、电机接口统一增加ESD防护器件,实现±5kV接触放电、±8kV空气放电防护能力。SPI、I2C、UART等弱电通信端口串联磁珠隔离高频噪声,并联稳压电容滤除尖峰干扰;功率端口预留TVS瞬态抑制器件,快速泄放浪涌与静电能量,避免干扰串入主控与精密采样电路。
5.4 接地与地弹噪声优化
地系统紊乱是扫地机干扰串扰的核心隐性问题。本文采用分区单点接地策略,将功率地、模拟地、数字地、传感器地物理分区布线,最终在电源输入端单点汇接,杜绝地环路电流。功率大电流走线短粗化,降低走线阻抗与地电位波动;采样电阻紧靠MOS桥臂布局,缩短电流采样回路,减少地弹噪声对采样精度的影响。
5.5 PCB布局EMC专项规范
PCB布局严格遵循强弱电分区、功率信号分离原则。功率MOS、预驱、输入滤波电容集中紧凑布局,最大限度缩小功率环路面积,降低高频辐射环路;PWM高频信号线单独布线,远离编码器、采样线、导航信号线;模拟采样区域完整铺地屏蔽,禁止穿越功率走线;多层PCB采用内层完整地平面设计,提升整体屏蔽性能与阻抗稳定性。
6 整机多电机协同EMC降噪策略
多电机同时工作存在噪声叠加效应,是扫地机区别于单电机设备的核心EMC难点。通过软件策略配合硬件优化实现全域降噪:多路电机PWM相位交错排布,避免多通道开关噪声同步叠加;根据清扫工况动态调节风机、滚刷开关频率,避开导航传感器敏感频点;行走低速工况降低PWM载波频率,减少低速啸叫与电磁干扰;负载突变时采用软启停、缓升降占空比策略,抑制瞬态电流尖峰。
7 实测验证与效果分析
基于本文电路与EMC优化方案的扫地机全域驱动系统,经整机电磁兼容测试与长期工况验证,性能提升显著。整机传导骚扰、辐射骚扰完全满足EN55032 Class B及家用电磁兼容国家标准;电机开关振荡与线束辐射噪声大幅降低,整机运行噪音下降3~6dB;杜绝了静电触发死机、导航漂移、低速抖动、高速啸叫等量产问题;多电机同步运行无干扰串扰,负载突变、高低电压工况下系统稳定性大幅提升,可直接适配批量生产与市场认证需求。
8 结论
本文针对智能扫地机多马达全域驱动系统的复杂工况与EMC痛点,构建了一套分层电路架构+差异化功率拓扑+全维度防护+系统化EMC优化的硬件设计方案。通过电源滤波、功率拓扑优化、采样抗扰、端口防护、接地重构、PCB分区布局与软件调频降噪的全链路设计,从根源解决了多电机高频开关干扰、地弹串扰、线束辐射、静电敏感等行业共性问题。
审核编辑 黄宇
-
驱动系统
+关注
关注
3文章
419浏览量
28704 -
emc
+关注
关注
177文章
4498浏览量
192576
发布评论请先 登录
扫地机器人“叛变”了
扫地机无刷马达驱动板功率拓扑及控制技
基于 H 桥驱动的扫地机马达控制电路原理设计
直流有刷马达驱动板:扫地机调速与换向控制机理
低功耗高集成扫地机器人多马达协同驱动硬件方案设计
扫地机无感 BLDC 驱动板:核心架构、控制算法与工程实现




评论