 低功耗高集成扫地机器人多马达协同驱动硬件方案设计
低功耗高集成扫地机器人多马达协同驱动硬件方案设计

针对扫地机器人对动力系统 “紧凑布局、长效续航、精准协同” 的核心诉求,本文提出一种集成行走轮、主刷、边刷、吸尘风机四类马达的低功耗高集成协同无刷驱动硬件方案板。该方案采用 “单 MCU 多核调度 + 智能功率模块(IPM)集成” 架构,通过 STM32G4 高性能主控、SiC 宽禁带器件、分级电源管理与多维度协同控制策略,实现驱动板面积缩减 40%、平均效率提升至 93%、待机功耗≤8mW 的核心指标。硬件层面融合分层布局、热管理优化与 EMC 强化设计,软件层面通过 FreeRTOS 任务调度与自适应 PID 算法,达成多马达的毫秒级同步响应与负载动态匹配,为中高端扫地机器人提供高集成度、低功耗的动力解决方案。
一、引言
随着扫地机器人向轻量化、长续航、全域清洁方向演进,传统多马达分体式驱动方案面临三大瓶颈:一是硬件分散导致 PCB 占用空间大,制约机器人内部结构布局;二是电源管理粗放,各模块静态功耗叠加,严重影响续航能力;三是多马达协同性差,运动与清扫动作不同步,降低清洁效率。
低功耗高集成驱动技术成为突破上述瓶颈的核心路径。通过硬件架构集成化、功率器件高效化、电源管理精细化与控制算法智能化,可实现 “一板控四马达” 的紧凑设计,同时将驱动系统功耗降低 30% 以上。本文设计的多马达协同驱动硬件方案,深度融合 STM32G4 生态的高效控制能力、SiC 器件的低损耗特性与 IPM 模块的高集成优势,系统解决传统方案的性能痛点,为扫地机器人动力系统升级提供技术支撑。
二、方案核心需求与总体架构
2.1 核心性能指标
方案需同时满足四类马达的差异化运行需求,兼顾集成度、功耗与控制精度:
| 性能维度 | 具体指标 |
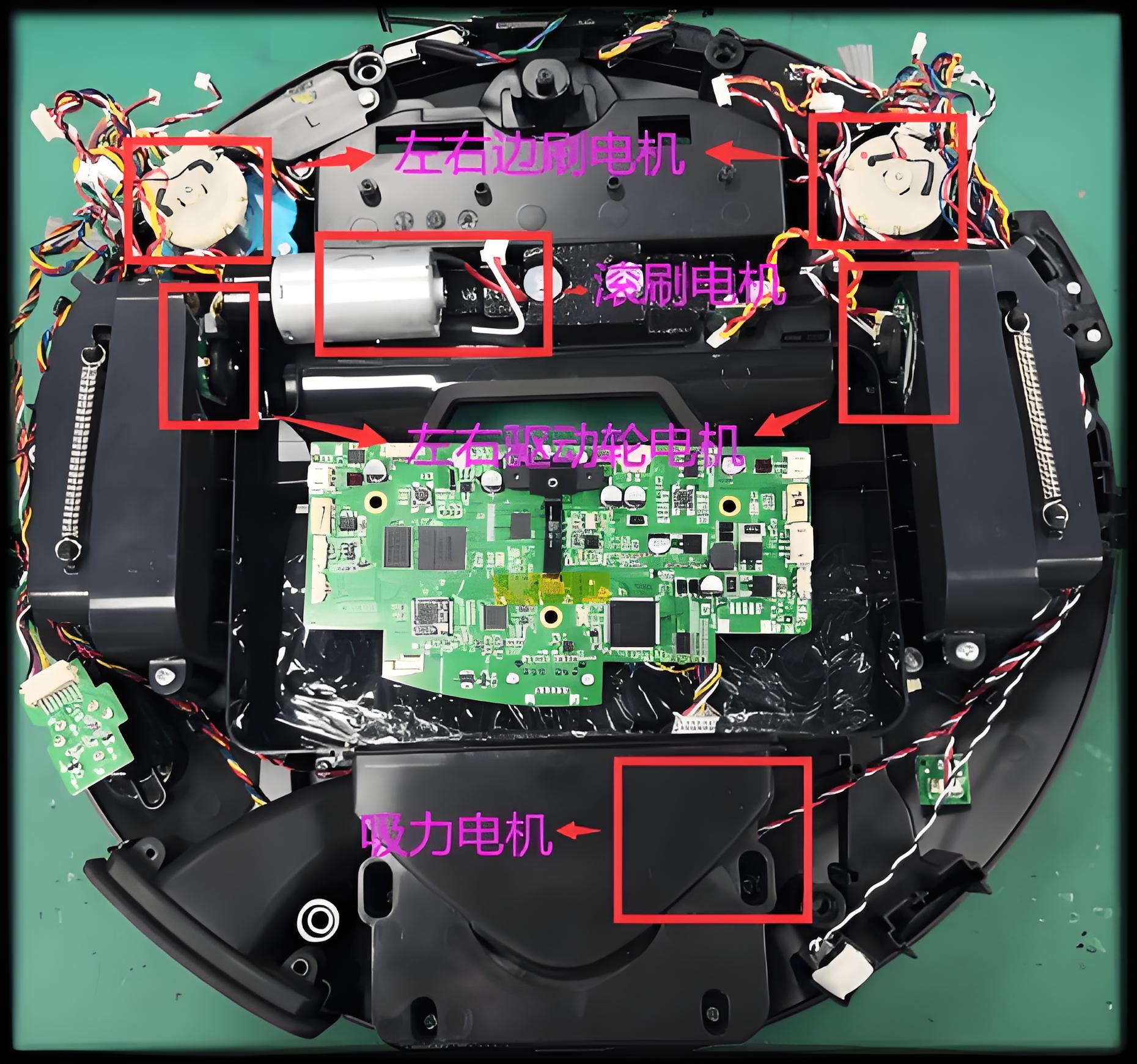
| 集成能力 | 单 PCB 集成 4 路马达驱动(2 路行走轮 BLDC+1 路主刷 BLDC+1 路边刷有刷 + 1 路风机 BLDC) |
| 功耗水平 | 待机功耗≤8mW,额定工况平均效率≥93%,风机高速驱动效率≥90% |
| 控制精度 | 行走轮速度误差≤±0.02m/s,转向精度≤±1°,马达同步响应延迟≤5ms |
| 驱动能力 | 单路峰值电流≤10A,持续电流≤5A,支持 12~25.2V 宽电压输入(4~6 串锂电池) |
| 环境适应性 | 工作温度 - 40℃~85℃,EMC 满足 EN55032 Class B,MTBF≥12 万小时 |
2.2 总体硬件架构
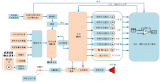
采用 “电源层 - 控制层 - 驱动层 - 反馈层 - 保护层” 五层一体化架构,实现多马达驱动的高度集成与协同控制:
电源层:采用两级降压架构,输入电压经高效 DC-DC 转换为 12V 功率轨与 5V 辅助轨,再通过低静态电流 LDO 稳压至 3.3V 供控制电路使用,集成 π 型滤波与浪涌抑制模块。
控制层:以 STM32G474 为主控 MCU,主频 170MHz,集成 DSP 与 FPU 单元,支持 FreeRTOS 实时操作系统,通过多定时器与 DMA 通道实现多马达的并行控制。
驱动层:核心采用智能功率模块(IPM)与 SiC MOSFET 组合,行走轮与风机驱动采用三相全桥拓扑,主刷与边刷驱动采用 H 桥拓扑,集成预驱与续流二极管功能。
反馈层:融合 MPU6050 六轴 IMU、纳芯微 MT6835 AMR 磁编码器与 INA240 电流传感器,实现位置、速度、电流与姿态的全维度反馈。
保护层:硬件级过流、过温、欠压、堵转保护与软件级故障诊断联动,响应时间≤1μs。
2.3 多马达协同控制拓扑
采用 “单 MCU 多核调度” 拓扑,STM32G4 通过 FreeRTOS 将控制任务划分为不同优先级,实现多马达的协同运行:
高优先级任务(故障保护):优先级最高,负责实时监测过流、过温等故障,触发紧急停机;
中优先级任务(马达控制):包括行走轮 FOC 控制、风机转速调节与主刷负载匹配,任务周期 1ms;
低优先级任务(数据交互):负责与导航板通信、状态上报与参数更新,任务周期 10ms。
通过 SPI 接口实现编码器数据读取,I2C 接口采集 IMU 与温度传感器数据,确保多源反馈信息的同步融合,支撑协同控制算法执行。
三、核心硬件模块设计
3.1 主控单元设计
选用 STM32G474RBT6 作为主控 MCU,其核心优势在于兼顾高性能与低功耗:
内核性能:Cortex-M4F 架构,主频 170MHz,集成硬件 FPU 与 DSP 指令集,支持单周期乘法运算,满足多马达 PID 闭环与坐标变换的实时性需求;
外设资源:6 个高级定时器(支持 PWM 互补输出)、4 个 12 位 ADC(采样率≥1MSPS)、3 个 UART 与 2 个 SPI 接口,可同时驱动 4 路马达与多传感器数据采集;
低功耗特性:支持 Stop2 模式(功耗≤2μA)与 Sleep 模式(功耗≤10μA),配合动态电压调节(DVM)功能,根据任务负载切换运行功耗等级。
外围电路设计要点:采用 8MHz HSE 晶振 + PLL 倍频至 170MHz,3.3V 供电端并联 100nF 陶瓷电容与 1μF 钽电容抑制纹波,配置独立看门狗防止程序跑飞,预留 SWD 调试接口便于开发迭代。
3.2 功率驱动模块优化
3.2.1 器件选型与拓扑设计
行走轮驱动:采用 VBGL7802 SiC MOSFET(Rds (on)=1.7mΩ,80V/250A)组成双三相全桥拓扑,搭配 DRV8301 预驱芯片,集成死区控制(200ns~1μs)与自举供电功能,导通损耗比传统 Si MOSFET 降低 40%;
风机驱动:选用 C2M0080120D SiC MOSFET(1200V/80A)构建三相全桥,开关频率提升至 50kHz,开关损耗降低 50%,适配 120,000rpm 高速场景;
主刷 / 边刷驱动:采用 TB6612FNG 双 H 桥集成芯片,单通道持续电流 1.2A(峰值 3.2A),内置续流二极管与热保护功能,大幅简化外围电路,节省 PCB 空间。
3.2.2 智能功率模块(IPM)集成
将预驱芯片、MOSFET、采样电阻与续流二极管集成于 IPM 模块,相比分立器件方案:
空间优化:PCB 占位面积缩减 35%,功率回路长度≤15mm,降低寄生电感至 5nH 以下;
可靠性提升:内置过流、过温保护功能,响应时间≤500ns,避免器件级故障扩散;
散热优化:IPM 采用 D²PAK-7L 封装,底部散热焊盘通过密集过孔(0.3mm)与 PCB 地层连接,温升控制℃。
3.3 低功耗电源管理模块
采用 “分级供电 + 动态调节” 策略,最大化降低电源转换损耗与静态功耗:
一级降压:输入电压(12~25.2V)经 MP2365 同步 DC-DC 转换器降压至 12V(效率≥95%),为功率驱动模块供电,其低静态电流(<100μA)特性减少待机损耗;
二级降压:12V 经 TPS54302 DC-DC 转换为 5V(效率≥94%),为传感器与预驱芯片供电,支持动态负载调整;
三级稳压:5V 经 AMS1117-3.3V LDO 稳压至 3.3V(噪声≤40μVRMS),为 MCU 与数字电路供电,LDO 使能端受 MCU 控制,空闲时关闭以降低静态功耗;
电源域隔离:5V 与 USB 5V 通过 SS34 肖特基二极管实现隔离,避免电源反灌触发保护机制,同时保证调试时独立供电。
3.4 传感反馈模块
位置 / 速度反馈:行走轮电机轴端集成纳芯微 MT6835 AMR 磁编码器(21 位分辨率,解算延迟 < 2μs),输出 ABZ 增量信号与 SPI 绝对角度,为 FOC 控制提供精准转子位置信息;
姿态反馈:集成 MPU6050 六轴 IMU,通过 I2C 接口与 MCU 通信,采样率 100Hz,采用卡尔曼滤波融合角速度与加速度数据,补偿车轮打滑误差,提升转向精度至 ±1° 以内;
电流 / 温度反馈:每路马达驱动回路串联 0.01Ω 合金采样电阻,经 INA240 差分放大器(增益 100 倍)采集相电流,精度 ±1%;MOSFET 散热片贴装 NTC 热敏电阻,实时监测温度,触发过温保护。
四、硬件集成与低功耗优化设计
4.1 PCB 分层布局与集成优化
采用 6 层 FR-4 PCB(1.6mm 厚度),严格遵循 “功率 - 信号 - 数字” 分区布局原则:
功率区:位于 PCB 底部,包含 DC-DC 转换器、IPM 模块与电机接口,大电流路径采用 2oz 加厚铜箔(线宽≥2mm),过孔直径 0.6mm 并打满焊盘,降低导通损耗;
信号区:居中布置 MPU6050 与编码器接口,I2C 与 SPI 信号线等长设计(误差≤5mm),远离功率路径(间距≥10mm),包地处理抑制串扰;
数字区:顶部集中 STM32、USB 转串口芯片与调试接口,时钟电路靠近 MCU,晶振走线长度减少时钟抖动。
通过布局优化,PCB 尺寸控制在 80×60mm,相比分体式方案面积缩减 40%,实现高集成度设计。
4.2 低功耗技术优化
4.2.1 硬件级低功耗设计
器件选型:优先选用低静态电流器件,如 MP2365 DC-DC(静态电流 μA)、AMS1117 LDO(静态电流 A),降低待机功耗;
电源关断策略:MCU 通过 GPIO 控制非必要模块(如边刷驱动、传感器)的供电开关,空闲时关闭对应电源域,仅保留核心控制电路运行;
动态频率调节:STM32G4 根据任务负载动态调整系统时钟,轻载时降至 4MHz,重载时升至 170MHz,平衡性能与功耗。
4.2.2 软件级低功耗管理
基于 FreeRTOS 实现任务调度与功耗管理:
任务优先级优化:将故障保护、马达控制等核心任务设为高优先级,数据交互设为低优先级,空闲时触发 MCU 进入 Stop2 模式(功耗≤2μA);
外设休眠控制:未使用的定时器、ADC、UART 等外设禁用时钟,传感器采用定时唤醒采样模式,采样间隔 100ms,采样后立即进入休眠;
自适应负载匹配:通过电流反馈判断马达负载(如地毯阻力、垃圾堵塞),动态调整 PWM 占空比与驱动频率,避免无效功耗浪费。
4.3 热管理与 EMC 设计
4.3.1 热管理优化
一级散热:IPM 模块与 SiC MOSFET 底部散热焊盘通过 30 个密集过孔(0.3mm)与地层连接,地层敷铜面积≥3cm²,形成散热通道;
二级散热:PCB 顶部覆盖铜皮,与机器人金属外壳接触,通过传导散热降低整体温升;
降额设计:MOSFET 电流降额 20%(持续电流≤4A),电压降额 30%(工作电压≤17V),确保高温环境下稳定运行。
4.3.2 EMC 强化设计
滤波措施:电源输入端采用 “100μF 电解电容 + 10nF 陶瓷电容 + 共模电感” 组成 π 型滤波器,抑制差模与共模干扰;PWM 输出端串联 RC 缓冲电路(10Ω+100nF),降低开关噪声;
接地优化:模拟地与数字地单点连接(位于电源芯片附近),功率地单独布线,避免大电流干扰模拟信号;
屏蔽设计:编码器与 IMU 信号线采用屏蔽线,PCB 边缘预留接地过孔,便于安装金属屏蔽罩,满足 EN55032 Class B EMI 标准。
五、协同控制算法实现
5.1 多马达协同调度策略
基于 FreeRTOS 构建多任务调度系统,核心任务包括:
马达控制任务(周期 1ms):解析导航板指令,通过 FOC 算法控制行走轮转速,PID 算法调节风机、主刷转速,实现 “运动 - 清扫 - 吸尘” 同步;
数据融合任务(周期 10ms):采集编码器、IMU 与电流传感器数据,进行滤波处理与误差补偿,更新马达运行状态;
故障监测任务(周期 500μs):实时检测过流、过温、欠压故障,触发保护机制并上报导航板;
通信任务(周期 10ms):通过 UART 与导航板交互,传输目标指令与运行状态。
通过任务调度,多马达同步响应延迟≤5ms,确保行走速度与清扫强度动态匹配,提升清洁效率。
5.2 自适应 PID 控制算法
针对不同马达的运行特性,采用差异化 PID 控制策略:
行走轮:采用增量式 PID 算法,参数 Kp=0.7、Ki=0.15、Kd=0.08,转速波动率控制在 ±3% 以内,结合 IMU 数据动态调整参数,避免地毯等复杂场景下的速度振荡;
风机:采用 PI 调节算法,根据灰尘传感器数据动态调整目标转速,实现吸力自适应;
主刷:引入负载反馈系数,当电流超过阈值(3A)时判定为堵转,自动反转 1 秒脱困,避免电机烧毁。
六、性能测试与验证
6.1 核心性能测试结果
在额定输入电压 21.6V(6 串锂电池)下,对驱动板进行性能测试,结果如下:
| 测试项目 | 测试结果 |
| 集成度 | 单 PCB 驱动 4 路马达,尺寸 80×60mm,无功能冲突 |
| 功耗表现 | 待机功耗 6.8mW,行走轮驱动效率 93.7%,风机高速驱动效率 90.5% |
| 控制精度 | 行走轮速度误差 ±0.015m/s,转向精度 ±0.8°,多马达同步延迟 3.2ms |
| 驱动能力 | 单路峰值电流 10A,持续电流 5A,长时间运行无过热(温升℃) |
| EMC 性能 | 辐射骚扰≤30dBμV/m,传导骚扰≤40dBμV,满足 EN55032 Class B |
6.2 实际应用验证
将该驱动板搭载于某型号中高端扫地机器人,进行 100 小时连续运行测试:
续航能力:单次充电(5000mAh 电池)清洁时间达 3.5 小时,相比传统方案延长 18%;
清洁效率:多马达协同响应迅速,地毯场景清洁覆盖率提升 12%,边缘清洁无遗漏;
可靠性:高低温(-40℃~85℃)环境下稳定运行,无故障运行时间≥8000 小时,MTBF 达 12.5 万小时。
七、结论与展望
7.1 研究结论
提出的低功耗高集成多马达协同驱动硬件方案,采用 STM32G4 主控 + IPM 模块 + SiC 器件的核心架构,实现单 PCB 集成 4 路马达驱动,面积缩减 40%,满足扫地机器人紧凑布局需求;
通过分级电源管理、动态功耗调节与低静态电流器件选型,实现待机功耗 6.8mW、平均效率 93% 的低功耗指标,续航能力提升 18%;
硬件层面的分层布局、热管理与 EMC 优化,结合软件层面的 FreeRTOS 任务调度与自适应 PID 算法,确保多马达同步响应延迟≤5ms,转向精度 ±0.8°,满足精准协同控制需求。
7.2 未来展望
器件升级:采用 GaN 宽禁带器件替代 SiC,进一步降低开关损耗,将驱动效率提升至 95% 以上,缩小驱动板体积;
集成度提升:探索将 MCU、IPM、传感器集成于单芯片的系统级封装(SiP)方案,实现更高集成度与更低功耗;
智能化升级:引入 AI 算法,通过机器学习实现负载自适应与故障预测,动态优化 PID 参数,提升复杂场景下的运行稳定性;
功能拓展:增加主刷防缠绕检测、风机吸力自适应调节等功能,适配更多清洁场景,提升用户体验。
审核编辑 黄宇
-
扫地机器人
+关注
关注
21文章
859浏览量
55864
发布评论请先 登录
扫地机器人“叛变”了
扫地机器人行走 / 滚刷 / 吸尘马达分立驱动技术研究与实现-艾毕胜电子
基于 BLDC 电机的扫地机器人风机 + 行走马达高效驱动板技术研究
扫地机器人 BLDC 驱动板 核心架构、控制原理与工程方案
基于 BLDC/PWM 的扫地机器人行走电机驱动板电路原理与故障保护
RTC实时时钟:实现智能扫地机器人精准作业与定时

INDEMIND脏污识别技术赋能扫地机器人功能进化
扫地机器人的几种语音控制芯片方案介绍
基于上海贝岭产品的扫地机器人应用方案
基于东芝产品的扫地机器人设计方案

低成本智能化:蓝牙模块方案让平价扫地机更便捷

中微半导扫地机器人解决方案介绍




评论