 CW32L012/F030灵眸X1智能小车——用MPU6050做运动检测和姿态控制
CW32L012/F030灵眸X1智能小车——用MPU6050做运动检测和姿态控制

一、MPU6050模块
MPU6050又叫六轴运动传感器,集成了三轴加速度计和三轴陀螺仪。它通常用于运动检测和姿态估计等应用,广泛应用于机器人、无人机、游戏控制器、智能手环等领域。以下是关于MPU6050的详细介绍。
主要特点
六轴传感器: MPU6050包含三轴加速度计和三轴陀螺仪,能够检测物体的加速度和角速度。
I2C通信: MPU6050使用I2C接口进行数据传输,与微控制器的连接非常简单。
内置温度传感器: 此模块内置温度传感器,可以在一些应用中提供环境温度数据。
小巧轻便: MPU6050体积小、重量轻,非常适合需要较小空间和低重量的应用。
可编程量程: 允许用户根据需求配置加速度计和陀螺仪的灵敏度,以适应不同的应用场景。
驱动方式介绍
复位MPU6050,让MPU6050内部的所有寄存器恢复默认值(向0X6B写入0x80)


设置电源管理寄存器位0x00,以唤醒MPU6050,进入正常工作状态(向0x6B写入0x00)

陀螺仪配置寄存器(0x1B)设置MPU6050陀螺仪传感器满量程范围,这里选择正负2000dps


加速度传感器配置寄存器(0x1C)这里选择正负2g


陀螺仪采样率,由采样率分频寄存器(0x19)控制;这里设置为50hz即输出频率=1KHz,SMPLRT_DIV=19

设置MPU6050的数字低通滤波器,因为配置为50hz,找一个接近值,所以配置为0x03,42hz


设置PLL,一般选择x轴陀螺PLL作为时钟源,以获得更高精度的时钟。(向0X6B写入0x01)


设置加速度与陀螺仪都工作(向0X6C写入0x00)


这里还有一个寄存器可以用来检测是否有mpu6050(当AD0接地时,向0x75读取数据则返回0x68;当AD0接VCC时,向0x75读取数据则返回0x69)

以上是初始化的部分,初始化完成之后开始读取数据。
读取温度的地址:

读取陀螺仪测量值(原始值)分别有X/Y/Z轴的数据


读取加速度计测量值(原始值)分别有X/Y/Z轴的数据


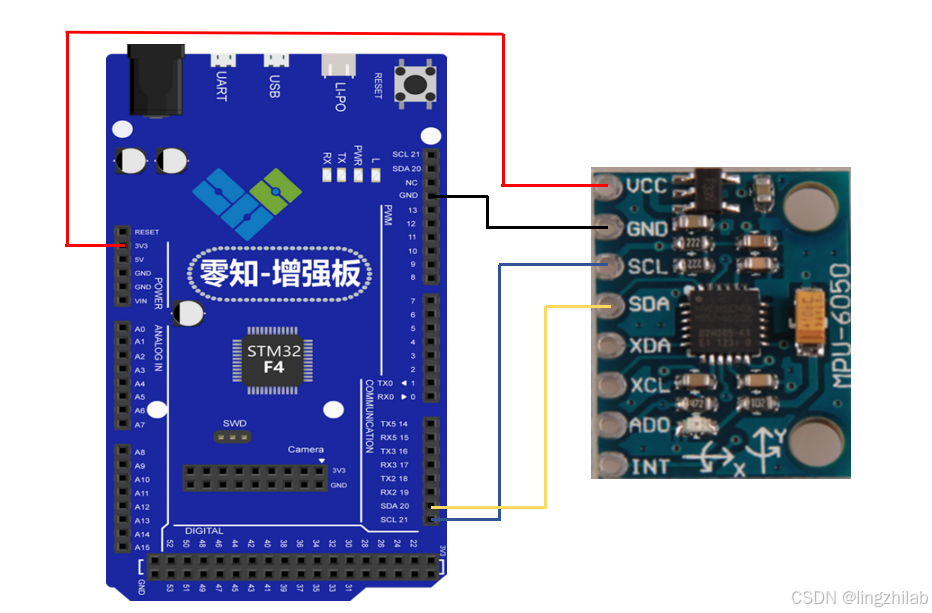
二、连接原理图
主控板上MPU6050接口如下

通过原理图可知MPU6050接到了PB6和PB7接口。
三、工程代码
将bsp_mpu6050.c与bsp_mpu6050.h拉入工程
在文件bsp_mpu6050.c中,编写如下代码。
/*
#include "bsp_mpu6050.h"
#include "stdio.h"
/******************************************************************
* 函 数 名 称:MPU6050_GPIO_Init
* 函 数 说 明:MPU6050的引脚初始化
* 函 数 形 参:无
* 函 数 返 回:无
* 作 者:LC
* 备 注:无
******************************************************************/
void MPU6050_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct; // GPIO初始化结构体
RCC_MPU6050_ENABLE(); // 使能GPIO时钟
GPIO_InitStruct.Pins = GPIO_SCL|GPIO_SDA; // GPIO引脚
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_OD; // 开漏输出
GPIO_InitStruct.Speed = GPIO_SPEED_HIGH; // 输出速度高
GPIO_Init(PORT_MPU6050, &GPIO_InitStruct); // 初始化
}
/******************************************************************
* 函 数 名 称:IIC_Start
* 函 数 说 明:IIC起始时序
* 函 数 形 参:无
* 函 数 返 回:无
* 作 者:LC
* 备 注:无
******************************************************************/
void IIC_Start(void)
{
SDA_OUT();
SCL(1);
SDA(0);
SDA(1);
delay_us(5);
SDA(0);
delay_us(5);
SCL(0);
}
/******************************************************************
* 函 数 名 称:IIC_Stop
* 函 数 说 明:IIC停止信号
* 函 数 形 参:无
* 函 数 返 回:无
* 作 者:LC
* 备 注:无
******************************************************************/
void IIC_Stop(void)
{
SDA_OUT();
SCL(0);
SDA(0);
SCL(1);
delay_us(5);
SDA(1);
delay_us(5);
}
/******************************************************************
* 函 数 名 称:IIC_Send_Ack
* 函 数 说 明:主机发送应答或者非应答信号
* 函 数 形 参:0发送应答 1发送非应答
* 函 数 返 回:无
* 作 者:LC
* 备 注:无
******************************************************************/
void IIC_Send_Ack(unsigned char ack)
{
SDA_OUT();
SCL(0);
SDA(0);
delay_us(5);
if(!ack) SDA(0);
else SDA(1);
SCL(1);
delay_us(5);
SCL(0);
SDA(1);
}
/******************************************************************
* 函 数 名 称:I2C_WaitAck
* 函 数 说 明:等待从机应答
* 函 数 形 参:无
* 函 数 返 回:0有应答 1超时无应答
* 作 者:LC
* 备 注:无
******************************************************************/
unsigned char I2C_WaitAck(void)
{
char ack = 0;
unsigned char ack_flag = 10;
SCL(0);
SDA(1);
SDA_IN();
SCL(1);
while( (SDA_GET()==1) && ( ack_flag ) )
{
ack_flag--;
delay_us(5);
}
if( ack_flag <= 0 )
{
IIC_Stop();
return 1;
}
else
{
SCL(0);
SDA_OUT();
}
return ack;
}
/******************************************************************
* 函 数 名 称:Send_Byte
* 函 数 说 明:写入一个字节
* 函 数 形 参:dat要写人的数据
* 函 数 返 回:无
* 作 者:LC
* 备 注:无
******************************************************************/
void Send_Byte(uint8_t dat)
{
int i = 0;
SDA_OUT();
SCL(0);//拉低时钟开始数据传输
for( i = 0; i < 8; i++ )
{
SDA( (dat & 0x80) >> 7 );
delay_us(1);
SCL(1);
delay_us(5);
SCL(0);
delay_us(5);
dat< <=1;
}
}
/******************************************************************
* 函 数 名 称:Read_Byte
* 函 数 说 明:IIC读时序
* 函 数 形 参:无
* 函 数 返 回:读到的数据
* 作 者:LC
* 备 注:无
******************************************************************/
unsigned char Read_Byte(void)
{
unsigned char i,receive=0;
SDA_IN();//SDA设置为输入
for(i=0;i< 8;i++ )
{
SCL(0);
delay_us(5);
SCL(1);
delay_us(5);
receive< <=1;
if( SDA_GET() )
{
receive|=1;
}
delay_us(5);
}
SCL(0);
return receive;
}
/******************************************************************
* 函 数 名 称:MPU6050_WriteReg
* 函 数 说 明:IIC连续写入数据
* 函 数 形 参:addr器件地址 regaddr寄存器地址 num要写入的长度 regdata写入的数据地址
* 函 数 返 回:0=读取成功 其他=读取失败
* 作 者:LC
* 备 注:无
******************************************************************/
char MPU6050_WriteReg(uint8_t addr,uint8_t regaddr,uint8_t num,uint8_t *regdata)
{
uint16_t i = 0;
IIC_Start();
Send_Byte((addr< <1)|0);
if( I2C_WaitAck() == 1 ) {IIC_Stop();return 1;}
Send_Byte(regaddr);
if( I2C_WaitAck() == 1 ) {IIC_Stop();return 2;}
for(i=0;i< num;i++)
{
Send_Byte(regdata[i]);
if( I2C_WaitAck() == 1 ) {IIC_Stop();return (3+i);}
}
IIC_Stop();
return 0;
}
/******************************************************************
* 函 数 名 称:MPU6050_ReadData
* 函 数 说 明:IIC连续读取数据
* 函 数 形 参:addr器件地址 regaddr寄存器地址 num要读取的长度 Read读取到的数据要存储的地址
* 函 数 返 回:0=读取成功 其他=读取失败
* 作 者:LC
* 备 注:无
******************************************************************/
char MPU6050_ReadData(uint8_t addr, uint8_t regaddr,uint8_t num,uint8_t* Read)
{
uint8_t i;
IIC_Start();
Send_Byte((addr< <1)|0);
if( I2C_WaitAck() == 1 ) {IIC_Stop();return 1;}
Send_Byte(regaddr);
if( I2C_WaitAck() == 1 ) {IIC_Stop();return 2;}
IIC_Start();
Send_Byte((addr< <1)|1);
if( I2C_WaitAck() == 1 ) {IIC_Stop();return 3;}
for(i=0;i< (num-1);i++){
Read[i]=Read_Byte();
IIC_Send_Ack(0);
}
Read[i]=Read_Byte();
IIC_Send_Ack(1);
IIC_Stop();
return 0;
}
/******************************************************************
* 函 数 名 称:MPU_Set_Gyro_Fsr
* 函 数 说 明:设置MPU6050陀螺仪传感器满量程范围
* 函 数 形 参:fsr:0,±250dps;1,±500dps;2,±1000dps;3,±2000dps
* 函 数 返 回:0,设置成功 其他,设置失败
* 作 者:LC
* 备 注:无
******************************************************************/
uint8_t MPU_Set_Gyro_Fsr(uint8_t fsr)
{
return MPU6050_WriteReg(0x68,MPU_GYRO_CFG_REG,1,(uint8_t*)(fsr< <3)); //设置陀螺仪满量程范围
}
/******************************************************************
* 函 数 名 称:MPU_Set_Accel_Fsr
* 函 数 说 明:设置MPU6050加速度传感器满量程范围
* 函 数 形 参:fsr:0,±2g;1,±4g;2,±8g;3,±16g
* 函 数 返 回:0,设置成功 其他,设置失败
* 作 者:LC
* 备 注:无
******************************************************************/
uint8_t MPU_Set_Accel_Fsr(uint8_t fsr)
{
return MPU6050_WriteReg(0x68,MPU_ACCEL_CFG_REG,1,(uint8_t*)(fsr< <3)); //设置加速度传感器满量程范围
}
/******************************************************************
* 函 数 名 称:MPU_Set_LPF
* 函 数 说 明:设置MPU6050的数字低通滤波器
* 函 数 形 参:lpf:数字低通滤波频率(Hz)
* 函 数 返 回:0,设置成功 其他,设置失败
* 作 者:LC
* 备 注:无
******************************************************************/
uint8_t MPU_Set_LPF(uint16_t lpf)
{
uint8_t data=0;
if(lpf >=188)data=1;
else if(lpf>=98)data=2;
else if(lpf>=42)data=3;
else if(lpf>=20)data=4;
else if(lpf>=10)data=5;
else data=6;
return data=MPU6050_WriteReg(0x68,MPU_CFG_REG,1,&data);//设置数字低通滤波器
}
/******************************************************************
* 函 数 名 称:MPU_Set_Rate
* 函 数 说 明:设置MPU6050的采样率(假定Fs=1KHz)
* 函 数 形 参:rate:4~1000(Hz) 初始化中rate取50
* 函 数 返 回:0,设置成功 其他,设置失败
* 作 者:LC
* 备 注:无
******************************************************************/
uint8_t MPU_Set_Rate(uint16_t rate)
{
uint8_t data;
if(rate>1000)rate=1000;
if(rate< 4)rate=4;
data=1000/rate-1;
data=MPU6050_WriteReg(0x68,MPU_SAMPLE_RATE_REG,1,&data); //设置数字低通滤波器
return MPU_Set_LPF(rate/2); //自动设置LPF为采样率的一半
}
/******************************************************************
* 函 数 名 称:MPU6050ReadGyro
* 函 数 说 明:读取陀螺仪数据
* 函 数 形 参:陀螺仪数据存储地址
* 函 数 返 回:无
* 作 者:LC
* 备 注:无
******************************************************************/
void MPU6050ReadGyro(short *gyroData)
{
uint8_t buf[6];
uint8_t reg = 0;
//MPU6050_GYRO_OUT = MPU6050陀螺仪数据寄存器地址
//陀螺仪数据输出寄存器总共由6个寄存器组成,
//输出X/Y/Z三个轴的陀螺仪传感器数据,高字节在前,低字节在后。
//每一个轴16位,按顺序为xyz
reg = MPU6050_ReadData(0x68,MPU6050_GYRO_OUT,6,buf);
if( reg == 0 )
{
gyroData[0] = (buf[0] < < 8) | buf[1];
gyroData[1] = (buf[2] < < 8) | buf[3];
gyroData[2] = (buf[4] < < 8) | buf[5];
}
}
/******************************************************************
* 函 数 名 称:MPU6050ReadAcc
* 函 数 说 明:读取加速度数据
* 函 数 形 参:加速度数据存储地址
* 函 数 返 回:无
* 作 者:LC
* 备 注:无
******************************************************************/
void MPU6050ReadAcc(short *accData)
{
uint8_t buf[6];
uint8_t reg = 0;
//MPU6050_ACC_OUT = MPU6050加速度数据寄存器地址
//加速度传感器数据输出寄存器总共由6个寄存器组成,
//输出X/Y/Z三个轴的加速度传感器值,高字节在前,低字节在后。
reg = MPU6050_ReadData(0x68, MPU6050_ACC_OUT, 6, buf);
if( reg == 0)
{
accData[0] = (buf[0] < < 8) | buf[1];
accData[1] = (buf[2] < < 8) | buf[3];
accData[2] = (buf[4] < < 8) | buf[5];
}
}
/******************************************************************
* 函 数 名 称:MPU6050_GetTemp
* 函 数 说 明:读取MPU6050上的温度
* 函 数 形 参:无
* 函 数 返 回:温度值单位为℃
* 作 者:LC
* 备 注:温度换算公式为:Temperature = 36.53 + regval/340
******************************************************************/
float MPU6050_GetTemp(void)
{
short temp3;
uint8_t buf[2];
float Temperature = 0;
MPU6050_ReadData(0x68,MPU6050_RA_TEMP_OUT_H,2,buf);
temp3= (buf[0] < < 8) | buf[1];
Temperature=((double) temp3/340.0)+36.53;
return Temperature;
}
/******************************************************************
* 函 数 名 称:MPU6050ReadID
* 函 数 说 明:读取MPU6050的器件地址
* 函 数 形 参:无
* 函 数 返 回:0=检测不到MPU6050 1=能检测到MPU6050
* 作 者:LC
* 备 注:无
******************************************************************/
uint8_t MPU6050ReadID(void)
{
unsigned char Re[2] = {0};
//器件ID寄存器 = 0x75
printf("mpu=%drn",MPU6050_ReadData(0x68,0X75,1,Re)); //读器件地址
if (Re[0] != 0x68)
{
printf("检测不到 MPU6050 模块");
return 1;
}
else
{
printf("MPU6050 ID = %xrn",Re[0]);
return 0;
}
}
/******************************************************************
* 函 数 名 称:MPU6050_Init
* 函 数 说 明:MPU6050初始化
* 函 数 形 参:无
* 函 数 返 回:0成功 1没有检测到MPU6050
* 作 者:LC
* 备 注:无
******************************************************************/
char MPU6050_Init(void)
{
MPU6050_GPIO_Init();
delay_ms(10);
//复位6050
MPU6050_WriteReg(0x68,MPU6050_RA_PWR_MGMT_1, 1,(uint8_t*)(0x80));
delay_ms(100);
//电源管理寄存器
//选择X轴陀螺作为参考PLL的时钟源,设置CLKSEL=001
MPU6050_WriteReg(0x68,MPU6050_RA_PWR_MGMT_1,1, (uint8_t*)(0x00));
MPU_Set_Gyro_Fsr(3); //陀螺仪传感器,±2000dps
MPU_Set_Accel_Fsr(0); //加速度传感器,±2g
MPU_Set_Rate(50);
MPU6050_WriteReg(0x68,MPU_INT_EN_REG , 1,(uint8_t*)0x00); //关闭所有中断
MPU6050_WriteReg(0x68,MPU_USER_CTRL_REG,1,(uint8_t*)0x00); //I2C主模式关闭
MPU6050_WriteReg(0x68,MPU_FIFO_EN_REG,1,(uint8_t*)0x00); //关闭FIFO
MPU6050_WriteReg(0x68,MPU_INTBP_CFG_REG,1,(uint8_t*)0X80); //INT引脚低电平有效
if( MPU6050ReadID() == 0 )//检查是否有6050
{
MPU6050_WriteReg(0x68,MPU6050_RA_PWR_MGMT_1, 1,(uint8_t*)0x01);//设置CLKSEL,PLL X轴为参考
MPU6050_WriteReg(0x68,MPU_PWR_MGMT2_REG, 1,(uint8_t*)0x00);//加速度与陀螺仪都工作
MPU_Set_Rate(50);
return 1;
}
return 0;
}
在文件bsp_mpu6050.h中,编写如下代码。
/* #ifndef _BSP_MPU6050_H_ #define _BSP_MPU6050_H_ #include "board.h" //端口移植 #define RCC_MPU6050_ENABLE() __RCC_GPIOB_CLK_ENABLE() #define PORT_MPU6050 CW_GPIOB #define GPIO_SDA GPIO_PIN_7 #define GPIO_SCL GPIO_PIN_6 //设置SDA输出模式 #define SDA_OUT() { GPIO_InitTypeDef GPIO_InitStruct; GPIO_InitStruct.Pins = GPIO_SDA; GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_OD; GPIO_InitStruct.Speed = GPIO_SPEED_HIGH; GPIO_Init(PORT_MPU6050, &GPIO_InitStruct); } //设置SDA输入模式 #define SDA_IN() { GPIO_InitTypeDef GPIO_InitStruct; GPIO_InitStruct.Pins = GPIO_SDA; GPIO_InitStruct.Mode = GPIO_MODE_INPUT_PULLUP; GPIO_InitStruct.Speed = GPIO_SPEED_HIGH; GPIO_Init(PORT_MPU6050, &GPIO_InitStruct); } //获取SDA引脚的电平变化 #define SDA_GET() GPIO_ReadPin(PORT_MPU6050, GPIO_SDA) //SDA与SCL输出 #define SDA(x) GPIO_WritePin(PORT_MPU6050, GPIO_SDA, (x?GPIO_Pin_SET:GPIO_Pin_RESET) ) #define SCL(x) GPIO_WritePin(PORT_MPU6050, GPIO_SCL, (x?GPIO_Pin_SET:GPIO_Pin_RESET) ) //MPU6050的AD0是IIC地址引脚,接地则IIC地址为0x68,接VCC则IIC地址为0x69 #define MPU6050_RA_SMPLRT_DIV 0x19 //陀螺仪采样率 地址 #define MPU6050_RA_CONFIG 0x1A //设置数字低通滤波器 地址 #define MPU6050_RA_GYRO_CONFIG 0x1B //陀螺仪配置寄存器 #define MPU6050_RA_ACCEL_CONFIG 0x1C //加速度传感器配置寄存器 #define MPU_INT_EN_REG 0X38 //中断使能寄存器 #define MPU_USER_CTRL_REG 0X6A //用户控制寄存器 #define MPU_FIFO_EN_REG 0X23 //FIFO使能寄存器 #define MPU_PWR_MGMT2_REG 0X6C //电源管理寄存器2 #define MPU_GYRO_CFG_REG 0X1B //陀螺仪配置寄存器 #define MPU_ACCEL_CFG_REG 0X1C //加速度计配置寄存器 #define MPU_CFG_REG 0X1A //配置寄存器 #define MPU_SAMPLE_RATE_REG 0X19 //采样频率分频器 #define MPU_INTBP_CFG_REG 0X37 //中断/旁路设置寄存器 #define MPU6050_RA_PWR_MGMT_1 0x6B #define MPU6050_RA_PWR_MGMT_2 0x6C #define MPU6050_WHO_AM_I 0x75 #define MPU6050_SMPLRT_DIV 0 //8000Hz #define MPU6050_DLPF_CFG 0 #define MPU6050_GYRO_OUT 0x43 //MPU6050陀螺仪数据寄存器地址 #define MPU6050_ACC_OUT 0x3B //MPU6050加速度数据寄存器地址 #define MPU6050_RA_TEMP_OUT_H 0x41 //温度高位 #define MPU6050_RA_TEMP_OUT_L 0x42 //温度低位 #define MPU_ACCEL_XOUTH_REG 0X3B //加速度值,X轴高8位寄存器 #define MPU_ACCEL_XOUTL_REG 0X3C //加速度值,X轴低8位寄存器 #define MPU_ACCEL_YOUTH_REG 0X3D //加速度值,Y轴高8位寄存器 #define MPU_ACCEL_YOUTL_REG 0X3E //加速度值,Y轴低8位寄存器 #define MPU_ACCEL_ZOUTH_REG 0X3F //加速度值,Z轴高8位寄存器 #define MPU_ACCEL_ZOUTL_REG 0X40 //加速度值,Z轴低8位寄存器 #define MPU_TEMP_OUTH_REG 0X41 //温度值高八位寄存器 #define MPU_TEMP_OUTL_REG 0X42 //温度值低8位寄存器 #define MPU_GYRO_XOUTH_REG 0X43 //陀螺仪值,X轴高8位寄存器 #define MPU_GYRO_XOUTL_REG 0X44 //陀螺仪值,X轴低8位寄存器 #define MPU_GYRO_YOUTH_REG 0X45 //陀螺仪值,Y轴高8位寄存器 #define MPU_GYRO_YOUTL_REG 0X46 //陀螺仪值,Y轴低8位寄存器 #define MPU_GYRO_ZOUTH_REG 0X47 //陀螺仪值,Z轴高8位寄存器 #define MPU_GYRO_ZOUTL_REG 0X48 //陀螺仪值,Z轴低8位寄存器 char MPU6050_WriteReg(uint8_t addr,uint8_t regaddr,uint8_t num,uint8_t *regdata); char MPU6050_ReadData(uint8_t addr, uint8_t regaddr,uint8_t num,uint8_t* Read); char MPU6050_Init(void); void MPU6050ReadGyro(short *gyroData); void MPU6050ReadAcc(short *accData); float MPU6050_GetTemp(void); uint8_t MPU6050ReadID(void); #endif 移植完成以上文件后,只是完成了获取陀螺仪和加速度的原始数据,我们是希望获取到角度数据。 因为MPU6050内部带有DMP处理单元,加上官方提供了比较完整的运动处理驱动库,大大降低了我们的编程和对数据的处理难度。我们可以将各个运动的参数计算,如旋转矩阵、四元数(quaternion)、欧拉角格式(Euler Angle forma)的融合演算数据,通过调用运动处理驱动库函数,直接读取出数据来。 这里提供官方的运动处理驱动库,分别需要用到“inv_mpu.h”、“inv_mpu.c”、“dmpKey.h”、“dmpmap.h“、“inv_mpu_dmp_motion_driver.h”、“inv_mpu_dmp_motion_driver.c”等六个文件。已经移植完成并适配开发板的官方库文件,见下方的文件下载。 下载链接 链接:https://pan.baidu.com/s/1zNmYa1-i6YtL5Wi0xuTtxA?pwd=LCKF 提取码:LCKF 下载完成之后,复制到bsp文件夹下 图片 然后导入工程即可。 随后在main函数中编写如下代码 float pitch=0,roll=0,yaw=0; //欧拉角 int main(void) { Uart_Init();//UART初始化 MPU6050_Init();//mpu6050初始化 mpu_dmp_init();//dmp自检 printf("HELLOrn"); while(1) { //获取欧拉角 if( mpu_dmp_get_data(&pitch,&roll,&yaw) == 0 ) { printf("rnpitch =%.2frn", pitch);//获取翻滚角 printf("rnroll =%.2frn", roll);//获取俯仰角 printf("rnyaw =%.2frn", yaw);//获取偏航角 } Delay_ms(200);//根据设置的采样率,不可设置延时过大 } }
四、工作现象
先将烧录器或者USB转TTL的TX接到PA3,RX接到PA2,然后打开串口助手,波特率为9600,随后将本次实验代码烧录进开发板,即可观察到串口打印出来的角度信息,如下

-
传感器
+关注
关注
2577文章
55483浏览量
793841 -
智能小车
+关注
关注
87文章
565浏览量
83519 -
运动检测
+关注
关注
0文章
41浏览量
12876 -
CW32
+关注
关注
1文章
323浏览量
1957
发布评论请先 登录
CW32L012/F030灵眸X1智能小车——板载WS2812驱动示例

零知开源——MPU6050六轴传感器模块实践教程,轻松实现运动检测!
CW32L012小型机器人控制评估板活动 四足机器人+智能小车 开箱评测
牛人用MPU6050做的倾角仪
请问怎么mpu6050姿态解算之后的数据与pid算法结合控制平衡小车
【迪文COF结构智能屏试用体验】使用MPU6050与COF屏实现航空姿态仪表
mpu6050姿态解算原理_mpu6050姿态解算程序
毕业设计之 - 教程:MPU6050姿态解算

零知开源——MPU6050六轴传感器模块实践教程,轻松实现运动检测!
CW32L012读取MPU6050姿态数据

CW32L012/F030灵眸X1智能小车--电机正反转控制

CW32L012/F030灵眸X1智能小车--电机调速控制




评论