 mpu6050姿态解算原理_mpu6050姿态解算程序
mpu6050姿态解算原理_mpu6050姿态解算程序

关于MPU6050姿态解算原理
mpu6050常用作提供飞控运行时的姿态测量和计算,在在姿态结算中有几个重要的概念,欧拉角、四元数等。
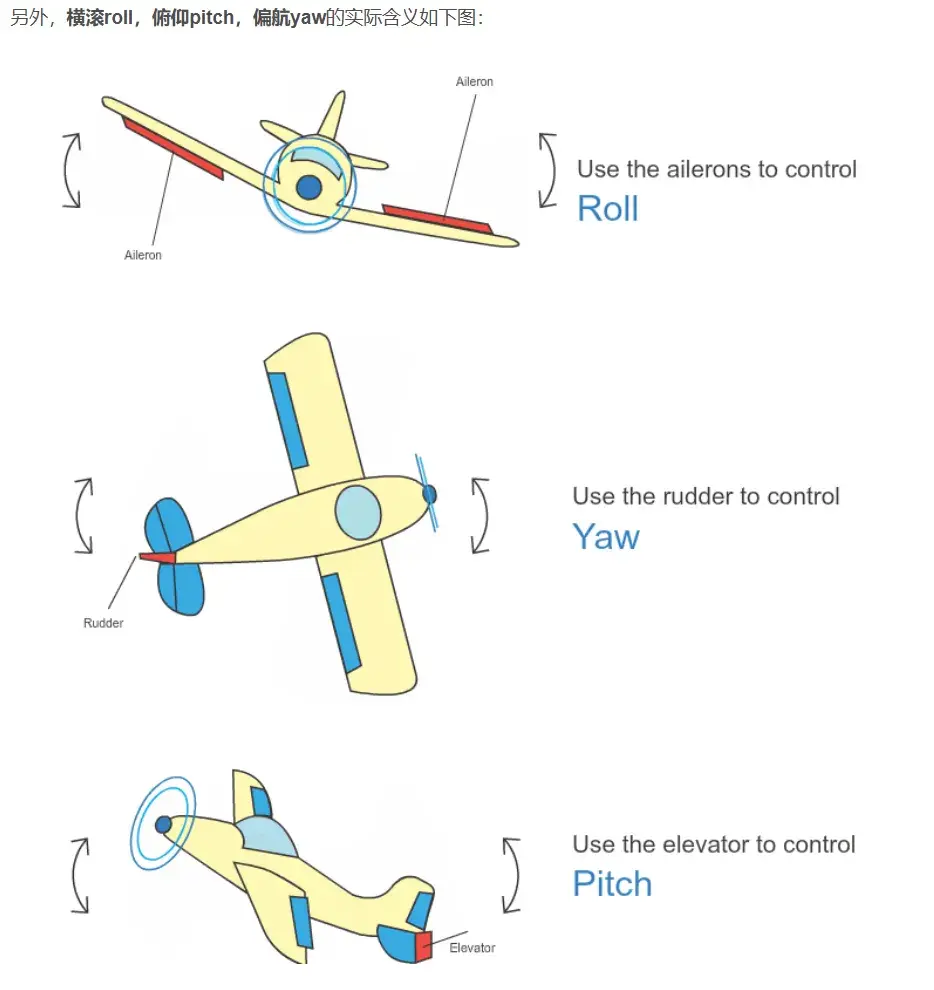
欧拉角:用来表征三维空间中运动物体绕着坐标轴旋转的情况。即物体的每时每秒的姿态可以由欧拉角表出。
四元数:超复数,q=(q0,q1,q2,q3),q0位实数,q1,q2,q3为虚部的实数。简单的可以理解为四维空间,就是原有的三维空间加入一个旋转角。而四元数可以表征欧拉角,并且计算方便,故采用四元数来计算。在此还要提到加速度和磁力计补偿原理,可以参照http://blog.csdn.net/nemol1990/article/details/21870197?utm_source=tuicool&utm_medium=referral博客中提到的原理与基本概念。在此再啰嗦一下:补偿的目的是使两个坐标系世界坐标系和刚体坐标系能够完全重合,在此基础上,计算补偿值来修正旋转矩阵,即四元数矩阵。最终的结果是解算出四元数的姿态,就是四元数矩阵的各个元素的值。按照上述博客中的程序解算四元数的时候,用到了Kp和Ki两个参数,两个参数的作用是用来控制矫正刚体坐标系速度的。即调节加速度和磁力计补偿的速度(调节误差的生成速度,进而调节刚体坐标系和世界坐标系的重合度)
加速计补偿的理解:
由于重力加速度的原因,加速计只能补偿X-Y轴的偏差,即经过解算后的坐标中世界坐标XOY和刚体坐标XOY能够重合,但是无法补偿航向角。
在此基础上,利用磁力计进行补偿,因为当地磁场是一个椭圆,所以我们把世界坐标系的X-AIXS轴对准真实世界的北方,这样,磁场园只能在XOZ的平面圆里面,所以磁力计在世界坐标系中的分量是[I,0,k],即在Y轴没有分量,因为90度的夹角余弦为0.但此时i和k的值并不确定是多少。在刚体坐标系中磁力计的输出为[a,b,c,],旋转到和世界坐标系中,计算出i和k,然后,在经过旋转把其旋转到刚体坐标系中,然后计算误差修正旋转矩阵,此时得到精确的旋转矩阵。
mpu6050姿态解算程序
08.MPU6050\Hardware\ioi2c.c
08.MPU6050\Hardware\ioi2c.h
08.MPU6050\Hardware\mpu6050.c
08.MPU6050\Hardware\mpu6050.h
08.MPU6050\Hardware\nrf24l01.c
08.MPU6050\Hardware\nrf24l01.h
08.MPU6050\Hardware\spi.c
08.MPU6050\Hardware\spi.h
08.MPU6050\Libraries\CMSIS\CMSISENDUSERLICENCEAGREEMENT.pdf
08.MPU6050\Libraries\CMSIS\Device\ST\STM32F4xx\Include\stm32f4xx.h
08.MPU6050\Libraries\CMSIS\Device\ST\STM32F4xx\Include\system_stm32f4xx.h
08.MPU6050\Libraries\CMSIS\Device\ST\STM32F4xx\Source\Templates\arm\startup_stm32f4xx.s
08.MPU6050\Libraries\CMSIS\Device\ST\STM32F4xx\Source\Templates\gcc_ride7\startup_stm32f4xx.s
08.MPU6050\Libraries\CMSIS\Device\ST\STM32F4xx\Source\Templates\iar\startup_stm32f4xx.s
08.MPU6050\Libraries\CMSIS\Device\ST\STM32F4xx\Source\Templates\system_stm32f4xx.c
08.MPU6050\Libraries\CMSIS\Device\ST\STM32F4xx\Source\Templates\TASKING\cstart_thumb2.asm
08.MPU6050\Libraries\CMSIS\Device\ST\STM32F4xx\Source\Templates\TrueSTUDIO\startup_stm32f4xx.s
08.MPU6050\Libraries\CMSIS\Documentation\CMSIS-SVD_Schema_1_0.xsd
08.MPU6050\Libraries\CMSIS\Documentation\CMSIS_Logo_Final.jpg
08.MPU6050\Libraries\CMSIS\Include\arm_common_tables.h
08.MPU6050\Libraries\CMSIS\Include\arm_math.h
08.MPU6050\Libraries\CMSIS\Include\core_cm0.h
08.MPU6050\Libraries\CMSIS\Include\core_cm3.h
08.MPU6050\Libraries\CMSIS\Include\core_cm4.h
08.MPU6050\Libraries\CMSIS\Include\core_cm4_simd.h
08.MPU6050\Libraries\CMSIS\Include\core_cmFunc.h
08.MPU6050\Libraries\CMSIS\Include\core_cmInstr.h
08.MPU6050\Libraries\CMSIS\README.txt
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\inc\misc.h
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\inc\stm32f4xx_adc.h
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\inc\stm32f4xx_can.h
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\inc\stm32f4xx_crc.h
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\inc\stm32f4xx_cryp.h
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\inc\stm32f4xx_dac.h
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\inc\stm32f4xx_dbgmcu.h
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\inc\stm32f4xx_dcmi.h
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\inc\stm32f4xx_dma.h
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\inc\stm32f4xx_exti.h
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\inc\stm32f4xx_flash.h
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\inc\stm32f4xx_fsmc.h
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\inc\stm32f4xx_gpio.h
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\inc\stm32f4xx_hash.h
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\inc\stm32f4xx_i2c.h
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\inc\stm32f4xx_iwdg.h
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\inc\stm32f4xx_pwr.h
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\inc\stm32f4xx_rcc.h
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\inc\stm32f4xx_rng.h
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\inc\stm32f4xx_rtc.h
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\inc\stm32f4xx_sdio.h
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\inc\stm32f4xx_spi.h
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\inc\stm32f4xx_syscfg.h
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\inc\stm32f4xx_tim.h
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\inc\stm32f4xx_usart.h
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\inc\stm32f4xx_wwdg.h
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\src\misc.c
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\src\stm32f4xx_adc.c
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\src\stm32f4xx_can.c
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\src\stm32f4xx_crc.c
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\src\stm32f4xx_cryp.c
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\src\stm32f4xx_cryp_aes.c
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\src\stm32f4xx_cryp_des.c
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\src\stm32f4xx_cryp_tdes.c
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\src\stm32f4xx_dac.c
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\src\stm32f4xx_dbgmcu.c
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\src\stm32f4xx_dcmi.c
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\src\stm32f4xx_dma.c
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\src\stm32f4xx_exti.c
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\src\stm32f4xx_flash.c
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\src\stm32f4xx_fsmc.c
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\src\stm32f4xx_gpio.c
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\src\stm32f4xx_hash.c
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\src\stm32f4xx_hash_md5.c
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\src\stm32f4xx_hash_sha1.c
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\src\stm32f4xx_i2c.c
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\src\stm32f4xx_iwdg.c
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\src\stm32f4xx_pwr.c
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\src\stm32f4xx_rcc.c
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\src\stm32f4xx_rng.c
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\src\stm32f4xx_rtc.c
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\src\stm32f4xx_sdio.c
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\src\stm32f4xx_spi.c
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\src\stm32f4xx_syscfg.c
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\src\stm32f4xx_tim.c
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\src\stm32f4xx_usart.c
08.MPU6050\Libraries\STM32F4xx_StdPeriph_Driver\src\stm32f4xx_wwdg.c
08.MPU6050\Output\Obj\STM32F4-TEST.hex
08.MPU6050\Project\JLinkSettings.ini
08.MPU6050\Project\STM32F4-TEST.uvgui.XiaoWei
08.MPU6050\Project\STM32F4-TEST.uvopt
08.MPU6050\Project\STM32F4-TEST.uvproj
08.MPU6050\System\delay.c
08.MPU6050\System\delay.h
08.MPU6050\System\led.c
08.MPU6050\System\led.h
08.MPU6050\System\sys.c
08.MPU6050\System\sys.h
08.MPU6050\System\timer2.c
08.MPU6050\System\timer2.h
08.MPU6050\System\uart.c
08.MPU6050\System\uart.h
-
MPU6050
+关注
关注
39文章
313浏览量
77118 -
姿态解算
+关注
关注
0文章
50浏览量
8677
发布评论请先 登录
mpu6050解算姿态问题
MPU6050姿态融合解算的相关资料推荐
MPU6050使用详解及DMP姿态解算

基于MPU6050的四轴硬件姿态解算研究
毕业设计之 - 教程:MPU6050姿态解算




评论