 零知开源——MPU6050六轴传感器模块实践教程,轻松实现运动检测!
零知开源——MPU6050六轴传感器模块实践教程,轻松实现运动检测!

本教程将指导您如何使用零知增强板与MPU6050六轴传感器模块进行交互。MPU6050是一款含有三轴加速度计和三轴陀螺仪的传感器,能够测量设备的倾斜情况和旋转运动。
通过本教程,您将学习如何读取并处理这些数据,为您的项目添加运动检测和姿态控制功能。
一、硬件连接
在开始编程之前,首先需要正确连接MPU6050模块到零知增强板。
1.所需材料:
零知增强板
MPU6050六轴传感器模块
跳线若干
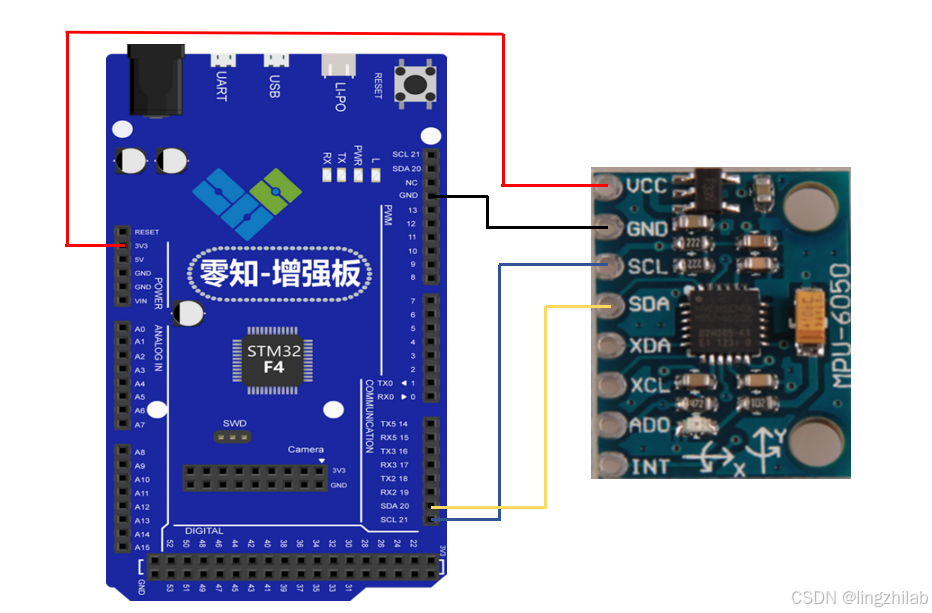
2.硬件连接示意图:
MPU6050模块的SCL和SDA分别连接到零知增强板的21、20号引脚
| 零知增强版 | MPU6050 |
| 3.3V | VCC |
| GND | GND |
| 21/SCL | SCL |
| 20/SDA | SDA |
完成以上步骤后,硬件连接就完成了。
二、代码实现
接下来,我们将编写代码来读取MPU6050的数据。
准备工作:
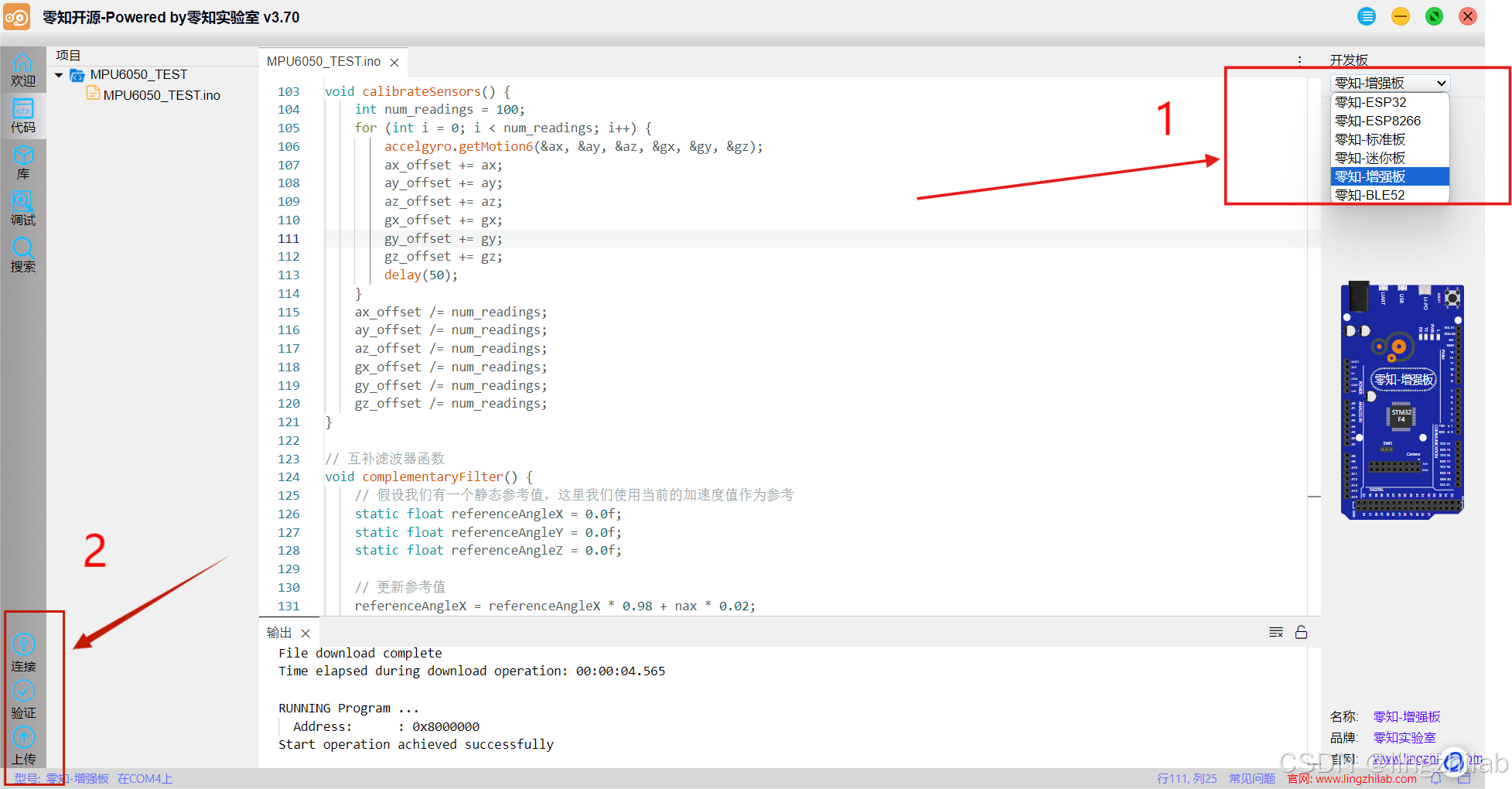
1.打开零知开源平台,选择零知增强板开发板
2.选择电脑连接的串口,验证代码并上传
完整源代码:
/* I2C interface MPU6050 demo * powered by www.lingzhilab.com */ #include "MPU6050.h" // 默认I2C地址为 0x68 // AD0 low = 0x68 // AD0 high = 0x69 MPU6050 accelgyro; int16_t ax, ay, az;//三轴加速度值 int16_t gx, gy, gz;//三轴陀螺仪值 float nax,nay,naz; float ngx,ngy,ngz;//转换后的实际值 #define LED_PIN LED_BUILTIN bool blinkState = false; void setup() { Serial.begin(9600); // MPU6050初始化设置 Serial.println("Initializing I2C devices..."); accelgyro.initialize(); // verify connection Serial.println("Testing device connections..."); if(accelgyro.testConnection()){ Serial.println("MPU6050 connection successful"); }else{ Serial.println("MPU6050 connection failed"); } //使用LED进行指示 pinMode(LED_PIN, OUTPUT); // accelgyro.setFullScaleAccelRange(MPU6050_ACCEL_FS_16);//加速度参数 // accelgyro.setFullScaleGyroRange(MPU6050_GYRO_FS_500);//陀螺仪 } void loop() { // 获取原始的数值:三轴加速度值和三轴陀螺仪数值 accelgyro.getMotion6(&ax, &ay, &az, &gx, &gy, &gz); // 分别获取 //accelgyro.getAcceleration(&ax, &ay, &az); //accelgyro.getRotation(&gx, &gy, &gz); // 显示打印 Serial.print(" acc:t"); Serial.print(ax); Serial.print("t"); Serial.print(ay); Serial.print("t"); Serial.print(az); Serial.print("t"); Serial.print("t gyro:t"); Serial.print(gx); Serial.print("t"); Serial.print(gy); Serial.print("t"); Serial.println(gz); //实际数值转换 accelgyro.readNormalizeAccel(&nax,&nay,&naz); accelgyro.readNormalizeGyro(&ngx,&ngy,&ngz); Serial.print("Normalize acc:t"); Serial.print(nax); Serial.print("t"); Serial.print(nay); Serial.print("t"); Serial.print(naz); Serial.print("t"); Serial.print("t Normalize gyro:t"); Serial.print(ngx); Serial.print("t"); Serial.print(ngy); Serial.print("t"); Serial.println(ngz); // blink LED to indicate activity blinkState = !blinkState; digitalWrite(LED_PIN, blinkState); delay(300); }
三、实验结果
将代码验证上传到零知增强板,打开串口监视器,设置波特率为9600。观察测量到的加速计和陀螺仪输出数据
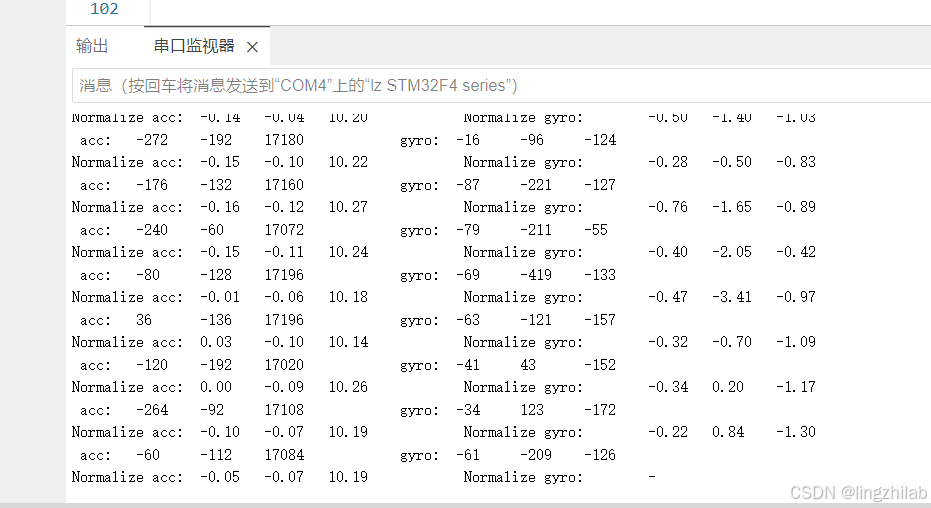
结果分析:
上传代码并打开串口监视器后,将看到加速度计和陀螺仪的原始数据以及归一化后的数据。
原始数据:
原始数据显示了MPU6050直接读取的数值,这些数值是传感器内部ADC转换后的数字量。
归一化数据:
归一化数据是将原始数据转换为实际的物理量(加速度单位为g,陀螺仪单位为度/秒)。这些数据更直观,便于进行后续的处理和分析。
通过本教程,您已经学会了如何使用零知增强板和MPU6050模块来读取运动数据。这些数据可以用于各种应用,如姿态控制、平衡机器人、运动跟踪等。您可以根据项目需求进一步处理和分析这些数据。
完整工程参考:
通过网盘分享的文件:MPU6050.rar
链接: https://pan.baidu.com/s/1nHM_Uh29d-DEb4zKxlAoGQ 提取码: kyrc
审核编辑 黄宇
-
传感器
+关注
关注
2578文章
55923浏览量
796052 -
运动检测
+关注
关注
0文章
42浏览量
12901
发布评论请先 登录
ZMOTION™ 检测模块开发套件:开启运动检测开发新旅程
零知派——TCS3200颜色识别传感器模块

BMA220:一款高性能的三轴加速度传感器
开源项目低功耗蓝牙智能骰子总体介绍

CW32L012读取MPU6050姿态数据

基于STEVAL-BLUEPIRV1的蓝牙低功耗运动检测技术解析
博世推出首款高性能六轴惯性传感器
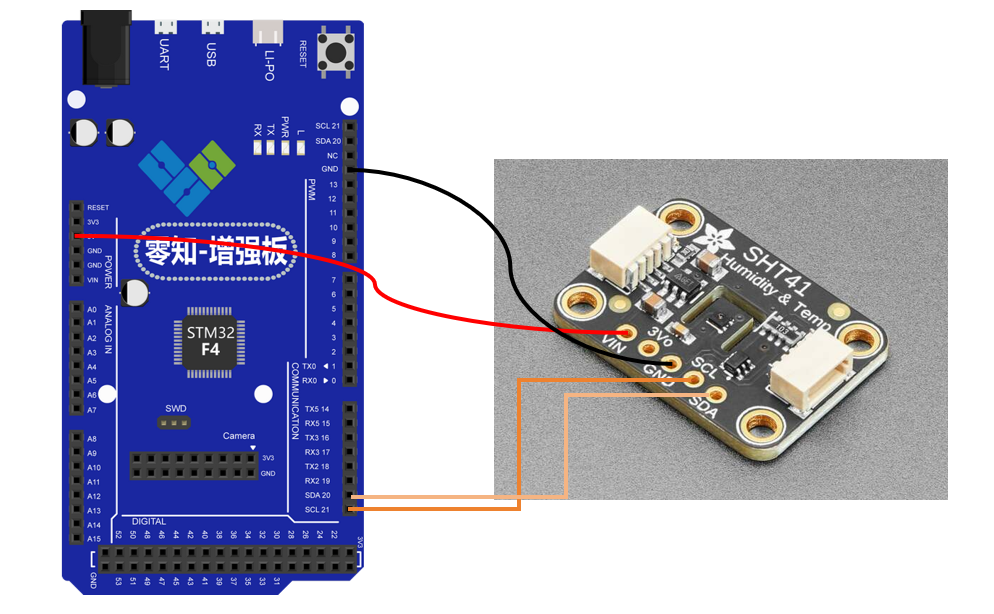
零知开源——STM32F407VET6驱动SHT41温湿度传感器完整教程
零知开源——STM32F407VET6驱动SHT41温湿度传感器完整教程
G-sensor运动检测功能开源:解锁硬件创新的无限可能!

小安派BW21-CBV-Kit入门教程之DMP6读取MPU6050数据
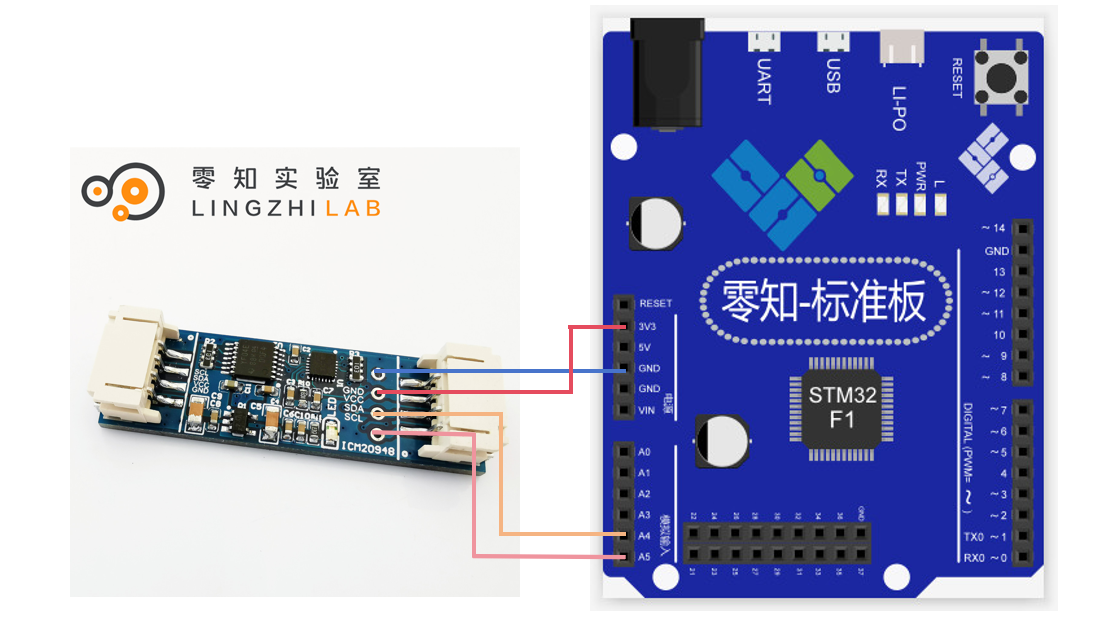
零知开源——STM32F103RBT6驱动 ICM20948 九轴传感器及 vofa + 上位机可视化教程
零知开源——STM32F103RBT6驱动 ICM20948 九轴传感器及 vofa + 上位机可视化教程



评论