 CW32L012解算MPU6050姿态数据
CW32L012解算MPU6050姿态数据

姿态解算
我们仅仅获取了MPU6050的三轴加速度和角速度,要想得到姿态角,需要利用读取的数据进行姿态解算。
一、欧拉角
欧拉角是一种用于描述三维刚体相对参考坐标系(通常为水平面的直角坐标系)姿态的参数,通过依次绕三个互相垂直的坐标轴(对应姿态检测中常用的翻滚角 Roll、俯仰角 Pitch、偏航角 Yaw,分别绕 X、Y、Z 轴旋转)的旋转角度来表征设备的倾斜、转向状态。
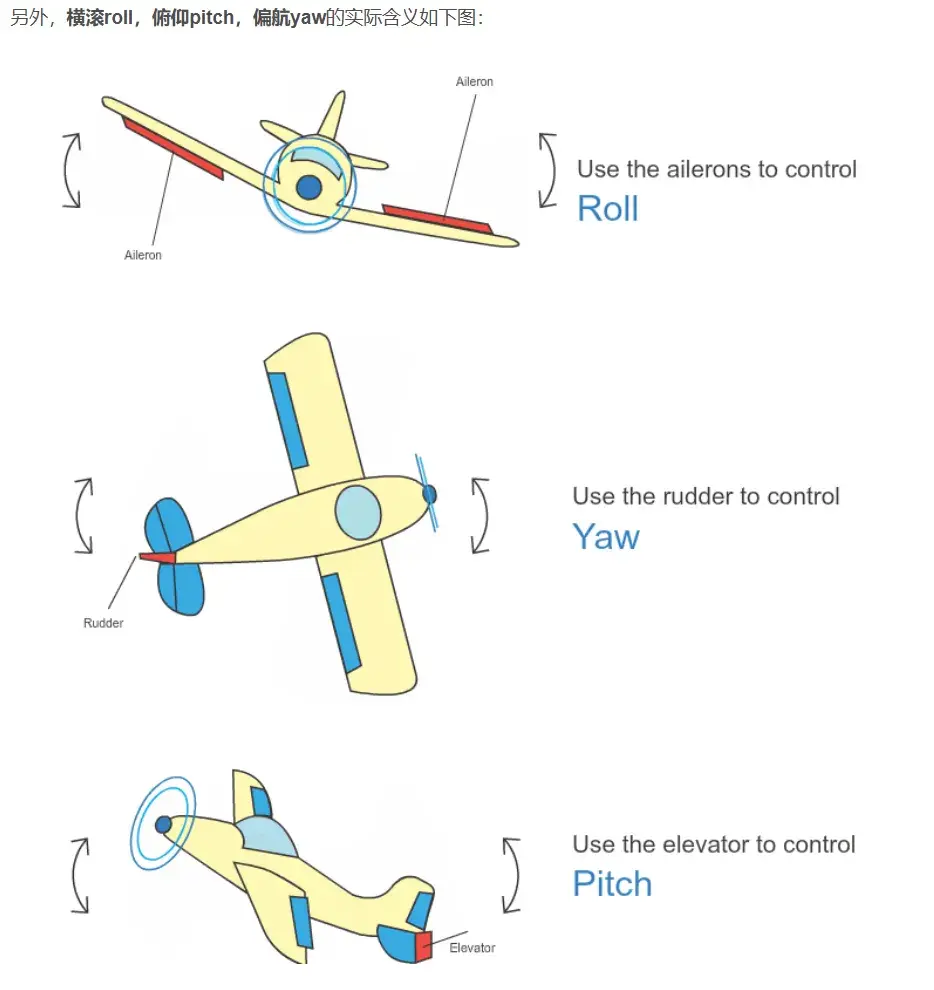
如下图所示:
横滚角(Roll):绕运动坐标系的Y轴旋转
偏航角(Yaw):绕运动坐标系的Z轴旋转
俯仰角(Roll):绕运动坐标系的X轴旋转
二、姿态解算
2.1利用加速度计解算姿态(仅能解算Roll和Pitch)
欧拉角与旋转矩阵来对陀螺仪与加速度计的原始数据进行姿态求解,并将两种姿态进行互补融合,最终得到IMU的实时姿态。
2.1.1位姿矩阵:
位姿矩阵是用于在三维笛卡尔参考坐标系中,统一描述刚体的位置(平移状态)与姿态 的 4×4 阶齐次变换矩阵,其前 3×3 的子矩阵为旋转矩阵,对应由欧拉角等姿态参数转换而来的刚体旋转信息,用来表征设备相对参考坐标系的倾斜、转向姿态(即 MPU6050 检测的 Roll、Pitch、Yaw 对应的姿态状态),矩阵最后一列的前 3 个元素为平移向量,用来表征设备在参考坐标系中的三维位置坐标,最后一行固定为 [0,0,0,1] 以满足齐次坐标的运算规范,它可以将刚体的旋转与平移变换整合为一次矩阵运算,在嵌入式姿态检测与空间定位的场景中,能简化不同坐标系间的姿态、位置转换计算,常作为姿态解算、多传感器融合的基础数学工具。
当加速度计水平放置,即Z轴竖直向上时,Z轴可以读到1g的数值(g为重力加速度),X轴和Y轴两个方向读到0,初始位姿可以记作:
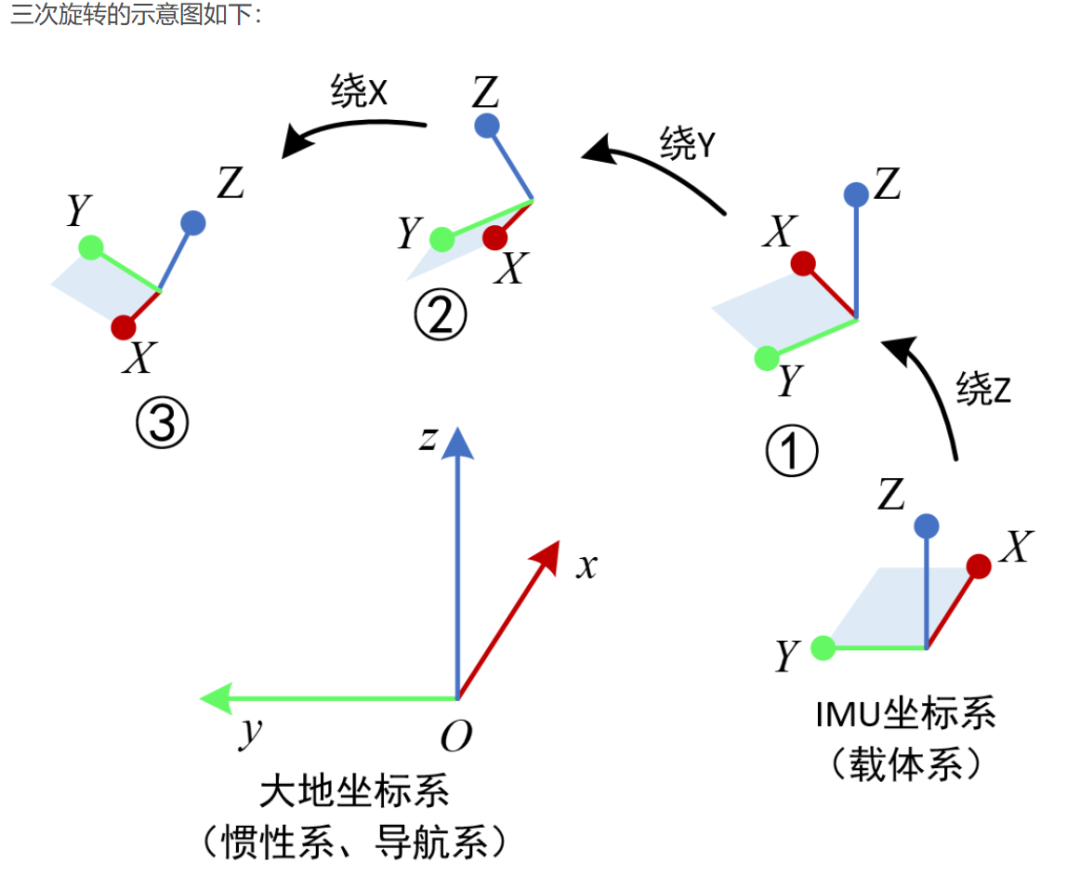
本篇的姿态解算选用的旋转顺序为ZYX,即IMU坐标系初始时刻与大地坐标系重合,然后依次绕自己的Z、Y、X轴进行旋转,这里先自定义一下每次的旋转名称和符号:
绕IMU的Z轴旋转:航向角yaw, 转动y角度
绕IMU的Y轴旋转:俯仰角pitch,转动p角度
绕IMU的X轴旋转:横滚角row, 转动r角度
当IMU绕Z轴旋转y度,再绕Y轴旋转P度,再绕X轴旋转r度,其终止位姿可以表示为:

根据机器人运动学:对于一个传感器的末端姿态,我们可以将其看作分别绕z、y,x轴旋转得到,其中正向运动学的绕各轴的旋转矩阵如下:

现在我们已知了初始位姿,终止位姿、绕三轴的旋转矩阵,对其进行机器人逆运动学的求解,可求得绕三个轴的旋转角度:
因为MPU6050是绕运动坐标系旋转,所以对应的矩阵变换是左乘:
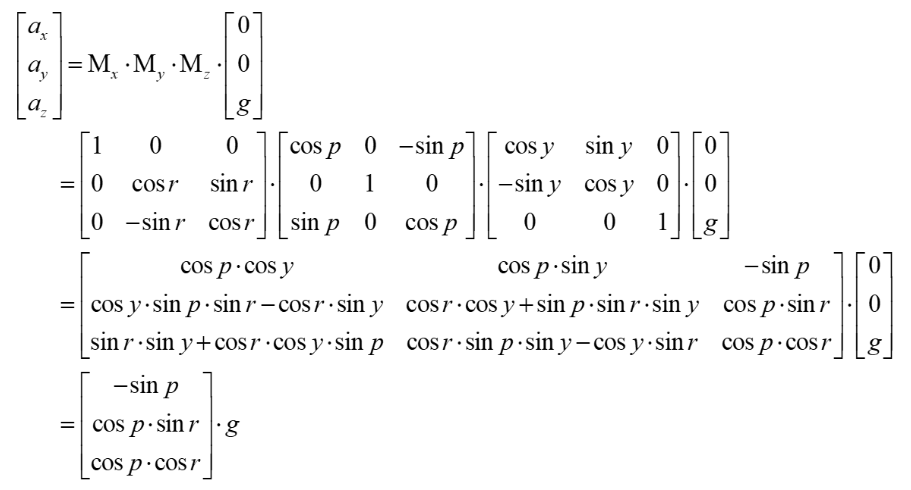
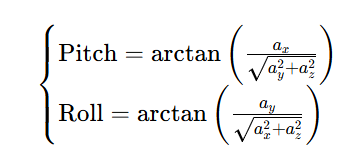
解这个方程,可以得到roll和pitch角(由于绕Z旋转时,感受到的重力加速度是不变的,因此加速度计无法计算****yaw角)
当IMU绕Z轴旋转y度,再绕Y轴旋转P度,再绕X轴旋转r度,其终止位姿可以表示为:
根据机器人运动学:对于一个传感器的末端姿态,我们可以将其看作分别绕z、y,x轴旋转得到,其中正向运动学的绕各轴的旋转矩阵如下:
现在我们已知了初始位姿,终止位姿、绕三轴的旋转矩阵,对其进行机器人逆运动学的求解,可求得绕三个轴的旋转角度:
因为MPU6050是绕运动坐标系旋转,所以对应的矩阵变换是左乘:
解这个方程,可以得到roll和pitch角(由于绕Z旋转时,感受到的重力加速度是不变的,因此加速度计无法计算yaw角)
解这个方程,可以得到roll和pitch角(由于绕Z旋转时,感受到的重力加速度是不变的,因此加速度计无法计算yaw角)
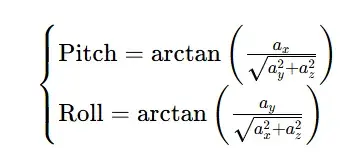
对应C语言代码:
//(atan2返回弧度,需转成度) Pitch角公式:atan2(AX, sqrt(AY2 + AZ2)) × (180/π)
accAnglePitch = atan2(ax, sqrt(ay*ay + az*az)) * (180.0f / M_PI);
// (若算roll角:atan2(AY, sqrt(AX2 + AZ2)) × (180/π))
accAngleRoll = atan2(ay, sqrt(ax*ax + az*az)) * (180.0f / M_PI);
2.2利用陀螺仪解算姿态
我们知道陀螺仪输出的是角速度,我们对其进行积分,可以得到角度:
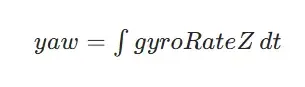
yaw角解算对应代码:
float gyroRateZ = -((gz / GYRO_SENSITIVITY) - gyroBiasZ); // 扣除零偏后的角速度后取反 // 步骤3:角速度积分计算Yaw角(核心:角度 = 角速度 × 时间) // 复用IMU_Process_Kalman中已计算的dt(采样时间,单位s) Cacl_yawAngle += gyroRateZ * dt;
pitch和roll角对应解算公式:


pitch和roll角对应解算代码(此代码在卡尔曼滤波器中,根据传入参数pitch和roll来决定解算什么角):
//此代码在卡尔曼滤波器中,根据传入参数pitch和roll来决定解算什么角
float KalmanFilter(float newAngle, float newRate, float dt,
float *kalmanAngle, float *kalmanBias, float kalmanP[2][2])
float rate = newRate - *kalmanBias; // 减去偏置
*kalmanAngle += dt * rate; // 积分得到角度变化
-
姿态检测
+关注
关注
0文章
7浏览量
7367 -
MPU6050
+关注
关注
39文章
313浏览量
77646 -
姿态解算
+关注
关注
0文章
50浏览量
8710
发布评论请先 登录
请问怎么mpu6050姿态解算之后的数据与pid算法结合控制平衡小车
MPU6050姿态融合解算的相关资料推荐

mpu6050姿态解算原理_mpu6050姿态解算程序
毕业设计之 - 教程:MPU6050姿态解算

CW32L012读取MPU6050姿态数据




评论