 固态变压器(SST)中LLC高频DC/DC变换级的控制算法架构与经典代码实现
固态变压器(SST)中LLC高频DC/DC变换级的控制算法架构与经典代码实现

固态变压器(SST)中LLC高频DC/DC变换级的控制算法架构与经典代码实现
BASiC Semiconductor基本半导体一级代理商倾佳电子(Changer Tech)是一家专注于功率半导体和新能源汽车连接器的分销商。主要服务于中国工业电源、电力电子设备和新能源汽车产业链。倾佳电子聚焦于新能源、交通电动化和数字化转型三大方向,代理并力推BASiC基本半导体SiC碳化硅MOSFET单管,SiC碳化硅MOSFET功率模块,SiC模块驱动板等功率半导体器件以及新能源汽车连接器。
倾佳电子杨茜致力于推动国产SiC碳化硅模块在电力电子应用中全面取代进口IGBT模块,助力电力电子行业自主可控和产业升级!
倾佳电子杨茜咬住SiC碳化硅MOSFET功率器件三个必然,勇立功率半导体器件变革潮头:
倾佳电子杨茜咬住SiC碳化硅MOSFET模块全面取代IGBT模块和IPM模块的必然趋势!
倾佳电子杨茜咬住SiC碳化硅MOSFET单管全面取代IGBT单管和大于650V的高压硅MOSFET的必然趋势!
倾佳电子杨茜咬住650V SiC碳化硅MOSFET单管全面取代SJ超结MOSFET和高压GaN 器件的必然趋势!
1. 绪论:固态变压器与高频功率变换的演进
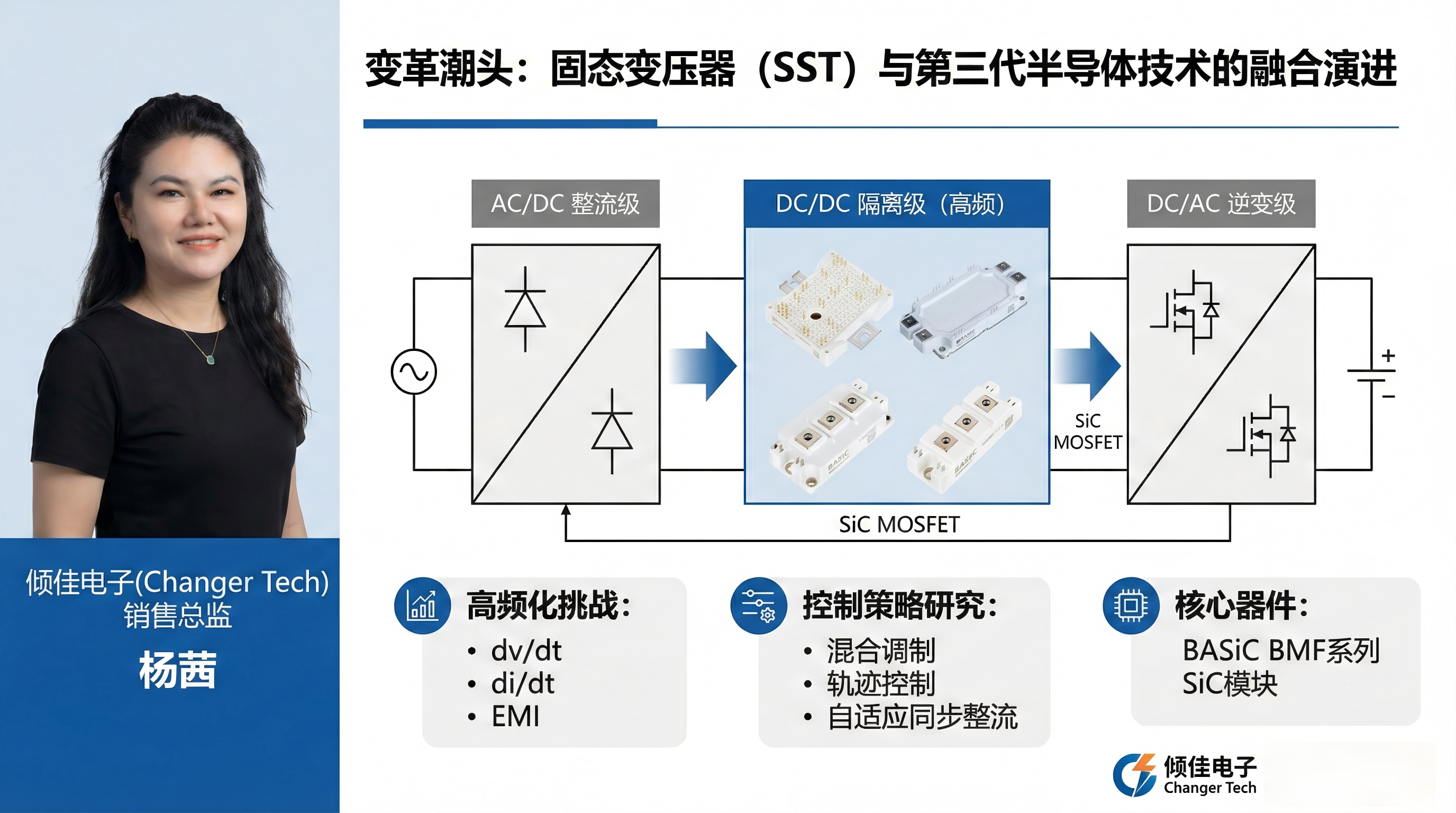
随着智能电网(Smart Grid)、分布式可再生能源发电以及交通电气化(如电动汽车超充站)的飞速发展,传统的工频电力变压器(Line-Frequency Transformer, LFT)因其体积庞大、功能单一且缺乏可控性,正逐渐难以满足现代电力系统的需求。在这一背景下,固态变压器(Solid State Transformer, SST),又称电力电子变压器(PET),作为一种能够实现电压等级变换、电气隔离以及能量双向流动与质量控制的主动式电力电子装置,成为了学术界与工业界关注的焦点。
SST的核心优势在于其高频化。通过将工作频率从50/60Hz提升至数十千赫兹(kHz)甚至兆赫兹(MHz)级别,磁性元件(变压器与电感)的体积和重量得以大幅缩减,从而显著提升系统的功率密度。然而,高频化同时也带来了巨大的开关损耗挑战。为了解决这一问题,SST中的DC/DC隔离级广泛采用了软开关技术,其中LLC串联谐振变换器(LLC Series Resonant Converter)凭借其全负载范围内的原边零电压开通(ZVS)和副边零电流关断(ZCS)特性,成为了首选拓扑方案之一。

尽管LLC拓扑在消费类电源中已应用成熟,但将其置于SST的中高压、大功率及双向流动场景中,引入了前所未有的控制复杂性。SST通常采用模块化级联结构,如输入串联输出并联(ISOP)配置,这就要求控制算法不仅要调节单一模块的输出,还必须协调模块间的电压与功率平衡。此外,宽范围的电压增益调节、双向能量流动的无缝切换、以及在极高频率下的同步整流(SR)精度,都对数字控制器的算力和固件架构提出了严苛要求。
倾佳电子杨茜剖析应用于SST的高频LLC DC/DC变换器的先进控制算法与固件实现策略。报告将从LLC的谐振机理出发,详细探讨混合调制策略(PFM/PSM)、双向CLLC控制、ISOP均压控制以及同步整流算法,并结合德州仪器(TI)C2000及意法半导体(ST)STM32等主流控制器的经典代码结构,为高频SST的工程实现提供详尽的理论依据与实践参考。
2. 高频LLC谐振变换器的理论基础与SST应用挑战
2.1 LLC谐振腔的工作机理与增益特性
LLC变换器的核心在于其谐振网络,该网络由串联谐振电感(Lr)、串联谐振电容(Cr)以及励磁电感(Lm)组成。与传统的PWM变换器不同,LLC利用频率调制(Pulse Frequency Modulation, PFM)来调节电压增益。谐振腔充当了一个频率选择性滤波器,其输入为半桥或全桥逆变器产生的方波电压,输出则通过变压器传递至副边整流级。
在SST应用中,为了简化分析与控制设计,通常采用基波近似法(First Harmonic Approximation, FHA)。该方法假设能量主要通过基波分量传输,从而将非线性的开关电路转化为线性的交流等效电路。基于FHA,LLC变换器的电压增益 M(fn,Q,k) 可以描述为归一化开关频率 fn、品质因数 Q 和电感比 k 的函数:
M(fn,Q,k)=(1+k1−kfn21)+jQ(fn−fn1)
其中:
fn=fs/fr:归一化开关频率,即实际开关频率与第一谐振频率之比。
k=Lm/Lr:电感比,反映了励磁电感与谐振电感的关系。较小的 k 值能提供更陡峭的增益曲线,但也意味着更大的励磁环流。
Q=RacLr/Cr:品质因数,与负载电阻 Rac 成反比。
LLC增益曲线呈现出两个显著特征,使其极其适合SST应用:
双谐振点:存在两个谐振频率,fr=2πLrCr 和 fm=2π(Lr+Lm)Cr。
单位增益点:当开关频率等于第一谐振频率(fs=fr)时,电压增益恒为1(或变压器匝比倒数),且该特性与负载无关。在这一点上,变换器效率最高,环流最小,是SST设计的理想标称工作点。
2.2 SST场景下的增益调节困境

尽管LLC在谐振点附近性能优异,但SST的应用场景往往要求极宽的电压调节范围。例如,在连接可再生能源或储能单元时,直流母线电压可能会在很大范围内波动(如电池组电压随SoC变化)。
升压需求(Boost Mode) :当输入电压降低时,LLC需要工作在 fm
降压需求(Buck Mode) :当输入电压升高时,LLC需工作在 fs>fr 区域。此时增益小于1,但随着频率升高,开关损耗增加,且副边整流管可能会失去ZCS特性,导致反向恢复损耗剧增。
这种“增益-频率”耦合特性在宽范围SST应用中引发了所谓的**频率失控(Frequency Runaway)**问题。单纯依赖PFM控制可能导致开关频率偏离设计优化点过远,从而降低效率甚至损坏器件。因此,SST中的LLC控制必须引入多自由度的混合调制策略。
2.3 软开关边界与死区时间优化
实现高频高效的关键在于全范围内的软开关。对于原边MOSFET,ZVS的实现依赖于在死区时间内,励磁电流(Im)能够完全抽取结电容(Coss)中的电荷,使漏源电压(Vds)在开通前降至零。
SST中广泛采用的SiC MOSFET虽然具有极低的Rds(on),但其体二极管的导通压降较高(约3-4V)。如果死区时间设置过长,体二极管长时间导通将导致显著的导通损耗;如果死区时间过短,无法实现ZVS,则会产生巨大的开通损耗和电磁干扰(EMI)。
经典设计中,死区时间 tdead 需满足:
tdead≥16Coss,eqfsLm
而在数字控制实现中,这一参数往往设计为随负载电流自适应调整的变量,而非固定值,以在全负载范围内优化效率。
3. 高级控制策略与算法架构
为了应对SST的宽范围和高效率需求,控制算法已从单一的模拟PFM演变为基于数字信号处理器(DSP)的复杂混合控制逻辑。
3.1 混合调制策略:PFM + PSM + PWM
在SST的数字控制中,通常根据工作区域划分不同的调制模式,并通过状态机进行平滑切换。
3.1.1 脉冲频率调制(PFM)—— 核心控制
PFM是LLC的主控制模式,主要用于额定工作点附近。数字控制器通过改变PWM模块的周期寄存器(如TI C2000中的TBPRD)来调整频率。
控制逻辑:电压环PI控制器的输出直接映射为开关频率。当输出电压低于参考值时,PI输出减小(频率降低)以提高增益;反之则增大频率。
局限性:轻载下增益曲线平坦,稳压能力丧失。
3.1.2 移相调制(PSM)—— 轻载与宽增益扩展
为了解决轻载下的稳压问题,全桥LLC拓扑引入了移相控制。保持开关频率固定(通常固定在 fr 或略高于 fr),调节超前桥臂与滞后桥臂之间的相位角 ϕ。
机理:移相改变了施加在谐振腔上的电压有效占空比,从而降低了基波电压幅值,进而降低增益。
算法实现:当PFM计算出的频率超过预设上限 fmax 时,控制逻辑锁定频率,转而调节相位寄存器(如C2000中的TBPHS)。这种混合控制显著扩展了LLC的可控增益范围,同时限制了最高工作频率,降低了EMI设计难度。
3.1.3 非对称PWM与Burp模式
在极轻载或待机模式下,为了进一步降低损耗,控制算法会进入Burst Mode(突发模式)或Burp Mode(打嗝模式) 。
控制逻辑:监测反馈变量(如频率或PI输出)。当负载低于阈值(如5%额定功率)时,封锁PWM输出。输出电容维持负载供电,电压缓慢下降。当电压跌落至下限阈值时,恢复PWM发波。
优化策略:为了避免突发模式带来的音频噪声和谐振腔电流冲击,先进算法采用“软进软出”策略,即在Burst波包的起始和结束阶段,逐步增加和减小脉冲宽度,而非硬开关。
3.2 双向CLLC谐振变换器控制
SST往往要求双向能量传输(V2G、储能接口)。传统的LLC结构是非对称的,反向工作时(Buck模式变Boost模式)效率低下。因此,对称的CLLC(双向LLC)拓扑被广泛采用,其原副边均包含谐振电容和电感。
正反向控制策略差异:
正向模式(Forward Mode) :原边全桥做逆变,副边全桥做同步整流。控制变量为原边频率。
反向模式(Reverse Mode) :副边全桥做逆变,原边全桥做同步整流。控制变量为副边频率。
模式切换算法:控制器需实时监测功率流向指令。切换过程中,必须先软关断当前发送侧的PWM,经过死区时间等待谐振电流衰减为零后,再软启动另一侧的PWM,以避免硬换流造成的电压尖峰。
3.3 输入串联输出并联(ISOP)均压控制
在中高压SST中,单个LLC模块无法承受全部输入电压,必须采用ISOP结构。由于器件参数离散性,模块间的输入电压(Vin_i)会出现不平衡。
均压控制算法架构:
该系统采用双环控制架构,包含一个公共的输出电压环和多个局部的输入均压环。
公共环(Common Loop) :采样总输出电压 Vout,通过PI控制器生成公共频率指令 fcommon。
差分环(Differential Loop) :每个模块采样自身的输入电压 Vin_i,并与平均输入电压 Vavg=Vin_total/N 进行比较。
均压逻辑:
若某模块 Vin_i>Vavg,说明该模块阻抗过大(分压过多),需要增加其功率吞吐量来泄放电荷。
在LLC的感性增益区(f
相反,若工作在容性区或高频区(Buck模式),调节方向则相反。控制算法必需知晓当前工作点位于增益曲线的哪一侧。
4. 同步整流(SR)的数字控制技术
同步整流是提升低压大电流输出侧效率的关键。在LLC中,副边电流呈正弦波状,且相位随频率变化,这使得SR的开通和关断时机极难通过固定逻辑控制。
4.1 基于Vds检测的自适应SR算法
这是目前最主流的数字SR控制方案。通过高速比较器或ADC检测SR MOSFET的漏源电压 Vds。
算法逻辑状态机:
等待开通(Wait for Turn-On) :体二极管导通时,Vds 变为负值(约-0.7V)。当 Vds
导通阶段(Conducting) :MOSFET导通,Vds=I×Rds(on),通常在mV级别。
等待关断(Wait for Turn-Off) :随着谐振电流下降,Vds 逐渐上升趋向0V。当 Vds>Vth_off(如-10mV)时,立即关断门极。
自适应调节(Adaptive Tuning):
由于比较器延迟和驱动延迟,实际上很难精确在电流过零点关断。数字控制器通常采用逐周期的自适应调节算法:
如果在关断后检测到体二极管继续导通了较长时间(死区过长),则下一周期的关断阈值 Vth_off 提高,或直接延长导通时间计数器。
如果在关断瞬间检测到反向电流(Vds 正向尖峰),说明关断过晚,导致反流。下一周期需提前关断,减少导通时间20。
4.2 无传感器模型预测SR
在极高频(>500kHz)SST中,传感器延迟不可忽略。此时采用基于模型的SR算法。
算法原理:利用FHA模型或时域分析,计算出副边电流过零点相对于原边PWM边沿的时间差 tdelay。
在谐振点(fs=fr),电流与电压同相,SR导通时间约为 0.5Ts。
在偏离谐振点时,控制器根据当前的归一化频率 fn 和负载率,查表或通过简化的解析式实时计算 ton 和 toff 时刻。这种方法抗干扰能力强,但对参数敏感。
5. 经典代码结构与实现(基于TI C2000 MCU)
本节将理论算法转化为具体的C语言代码结构,展示如何在嵌入式系统中实现上述控制逻辑。以TI C2000系列(如TMS320F280049C或F28379D)为例,这些芯片具备高分辨率PWM(HRPWM)、比较器子系统(CMPSS)和三角函数加速器(TMU),非常适合LLC控制。
5.1 软件架构分层
稳健的数字电源固件通常采用中断驱动的前后台架构:
Fast ISR (控制环路) :优先级最高,运行频率通常与开关频率同步(如100kHz)或分频(如20kHz)。负责ADC采样读取、数字补偿器计算(2P2Z/3P3Z)、PWM寄存器更新、软启动斜坡生成。执行时间必须严格限制(例如 < 5us)。
Background Loop (后台主循环) :处理非实时任务,如状态机管理、故障保护恢复逻辑、通信(CAN/UART)、温度监控、PID参数自整定等25。
5.2 关键数据结构定义
C
// 定义LLC控制器状态机枚举
typedef enum {
LLC_STATE_IDLE, // 待机状态
LLC_STATE_SOFT_START, // 软启动状态(限制电流)
LLC_STATE_NORMAL_OP, // 正常闭环运行
LLC_STATE_BURST_MODE, // 突发模式(轻载)
LLC_STATE_FAULT // 故障停机
} LLC_State_t;
// 定义2P2Z数字补偿器结构体 (二阶IIR滤波器)
typedef struct {
float Ref; // 参考电压 (标幺值)
float Fdbk; // 反馈电压 (标幺值)
float Err; // 误差历史: e[n], e[n-1], e[n-2]
float Out; // 输出历史: u[n], u[n-1], u[n-2]
float Coeff_B; // 分子系数: b0, b1, b2
float Coeff_A; // 分母系数: a1, a2
float Max; // 输出上限 (对应最小频率/最大周期)
float Min; // 输出下限 (对应最大频率/最小周期)
} CNTL_2P2Z_t;
5.3 2P2Z控制律的C语言实现
这是LLC闭环控制的核心代码,通常运行在ISR中或由CLA(Control Law Accelerator)协处理器执行以节省CPU资源。
C
// 2P2Z 补偿计算函数
// 差分方程: u[n] = b0*e[n] + b1*e[n-1] + b2*e[n-2] - a1*u[n-1] - a2*u[n-2]
#pragma CODE_SECTION(CNTL_2P2Z_Update, ".TI.ramfunc"); // 放置在RAM中运行以提高速度
void CNTL_2P2Z_Update(CNTL_2P2Z_t *v)
{
// 1. 计算当前误差
v->Err = v->Ref - v->Fdbk;
// 2. 执行差分方程 (利用FPU指令优化)
float output = (v->Coeff_B * v->Err) +
(v->Coeff_B * v->Err) +
(v->Coeff_B * v->Err) -
(v->Coeff_A * v->Out) -
(v->Coeff_A * v->Out);
// 3. 输出限幅 (防积分饱和)
// 对于LLC,输出通常对应开关周期 Period
if (output > v->Max) {
output = v->Max;
} else if (output < v->Min) {
output = v->Min;
}
// 4. 更新历史数据,为下一次计算做准备
v->Err = v->Err;
v->Err = v->Err;
v->Out = v->Out;
v->Out = output;
v->Out = output; // 当前控制量
}
26
5.4 软启动(Soft-Start)状态机实现
软启动是防止谐振腔电流冲击和变压器饱和的关键。SST通常采用频率扫描法:从最高频率(增益最低)线性扫描至谐振频率。
C
// 在ISR中调用的软启动逻辑
void Run_SoftStart_ISR(void)
{
static float current_freq_hz = MAX_STARTUP_FREQ;
// 每一个ISR周期降低一定频率步长
current_freq_hz -= SOFT_START_STEP_HZ;
// 转换为PWM周期计数值 (SystemClock / Freq)
uint32_t period_ticks = (uint32_t)(SYSTEM_CLOCK_HZ / current_freq_hz);
// 更新PWM硬件寄存器 (使用影子寄存器Shadow Load确保波形完整)
EPWM_setTimeBasePeriod(LLC_PWM_BASE, period_ticks);
EPWM_setCounterCompareValue(LLC_PWM_BASE, EPWM_COUNTER_COMPARE_A, period_ticks / 2); // 保持50%占空比
// 检查是否达到正常工作频率或输出电压建立
if ((current_freq_hz <= NORMAL_OP_FREQ_LIMIT) |
| (Vout_Sensed > VOUT_TARGET * 0.9)) {
// 切换状态机到正常闭环
MachineState = LLC_STATE_NORMAL_OP;
// 初始化PID积分项,防止切换瞬间跳变
LLC_Controller.Out = period_ticks;
LLC_Controller.Out = period_ticks;
}
}
29
5.5 同步整流(SR)自适应调节逻辑
SR控制通常结合硬件比较器和软件调节。C2000 MCU的CMPSS模块可以检测电流过零,软件则微调导通时间。
C
// SR 自适应调整逻辑 (在低频ISR或后台运行)
void SR_Adaptive_Adjustment(void)
{
// 读取上个周期的体二极管导通时间 (通过eCAP捕获或CMPSS标志位推算)
uint16_t body_diode_time = Read_BodyDiode_Conduction_Time();
// 目标是保持极短的体二极管导通时间 (例如 50ns),保证ZCS且无反流
const uint16_t TARGET_TIME = 50; // ticks
if (body_diode_time > TARGET_TIME) {
// 二极管导通太久 -> 关断太早 -> 延长SR导通时间
SR_OnTime_Ticks++;
} else if (Check_Reverse_Current_Flag()) {
// 检测到反流 -> 关断太晚 -> 缩短SR导通时间
SR_OnTime_Ticks -= 5; // 快速回调以保护器件
}
// 更新SR PWM 关断时刻
// 注意:SR的开通通常由原边PWM同步或Vds比较器硬件直接触发
EPWM_setCounterCompareValue(SR_PWM_BASE, EPWM_COUNTER_COMPARE_B, Period - SR_OnTime_Ticks);
}
22
6. 前沿趋势:混合滞环控制(HHC)与电流模式LLC
虽然PFM是经典方法,但其动态响应较慢,因为其本质是电压模式控制,且谐振腔具有二阶特性。SST的最新研究正转向混合滞环控制(Hybrid Hysteretic Control, HHC) ,这是一种类似于电流模式的控制方法。
HHC原理:
HHC不直接计算频率。它利用谐振电容电压 Vcr 作为状态变量。控制环路计算出一个电荷阈值 Vth。
开关管开通。
谐振电流对 Cr 充电,Vcr 上升。
当 Vcr 达到 Vth 时,比较器翻转,强制关断开关管。
该过程自动决定了脉宽和频率。
这种方法具有极快的瞬态响应和天然的输入电压前馈特性。在C2000 MCU中,通过配置片上DAC作为比较器阈值,并将CMPSS输出直接链接到PWM跳闸区(Trip Zone),可以无需CPU干预实现逐周期的HHC控制。
7. 结论
SST中高频LLC变换器的控制设计是一项系统工程,它超越了简单的PID调节,涉及对谐振槽能量状态的精确管理。从保证基本ZVS运行的死区时间优化,到应对宽范围输入的PFM/PSM混合调制,再到提升效率的自适应同步整流,每一个环节都需紧密耦合。
数字控制器(如C2000)通过其丰富的高速模拟外设(CMPSS, 150ps分辨率HRPWM)和强大的算力(CLA, FPU),使得复杂的控制策略(如ISOP均压、HHC、模型预测SR)得以低成本实现。未来的SST控制固件将更加依赖于这种软硬件协同设计(Software-Defined Power),代码结构将更加模块化,以适应SST在智能电网中日益多变的角色。
审核编辑 黄宇
-
LLC
+关注
关注
38文章
641浏览量
80922
发布评论请先 登录
“无极性”直流母排在基于SiC模块级联型SST固态变压器PEBB中的应用

基于SiC模块的高频DC/DC变换器中的相移平衡与软开关频率匹配算法


中压固态变压器(SST)整机绝缘配合设计:符合 IEC 61800-5-1

固变SST固态变压器DAB双有源桥隔离DC-DC变换器热设计,移相控制策略,EMC设计

100kW的SST固态变压器高频 DAB 隔离直流变换器设计与验证



SST固态变压器硬件设计方案








评论