 雪天将如何影响激光雷达点云?
雪天将如何影响激光雷达点云?

[首发于智驾最前沿微信公众号]随着自动驾驶技术的不断发展,越来越多车辆已经配备了组合辅助驾驶系统。尤其是有很多车企,会采用感知融合的方案,通过在车辆上加装激光雷达、车载摄像头、毫米波雷达等感知硬件,以获得更多的感知信息。
在众多感知硬件中,激光雷达因其可以获得三维点云,一直是很多技术方案关注的重点。虽然激光雷达在很多场景下表现都比较优异,但是在很多极端场景中,还是会出现一些问题。随着天气渐冷,北方已经开始下雪,那些依赖激光雷达实现高阶自动驾驶的汽车是否会受到影响呢?

雪天为会让激光雷达点云出现哪些问题?
激光雷达传感器的工作原理是向周围环境发射激光脉冲,通过测量脉冲从物体表面反射回来的时间与强度,计算出目标的距离与轮廓信息。基于这些数据,系统能够构建出精细的周围环境三维点云。在正常运行条件下,这种方式可以高精度地识别并描绘出车辆周围的障碍物、地形以及其他交通参与者,为自动驾驶车辆提供可靠的环境感知基础。
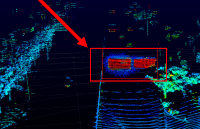
但是在雨雪天气中,空气中无数雪花会以固体颗粒的状态呈现。激光束照射到这些雪花上时,容易产生许多“误回波”,激光雷达会误将雪花识别为真实物体进行检测。这会让生成的点云掺杂了大量本不存在的噪声点,它们不代表真实环境,仅源于雪花的反射干扰。
这种噪声会导致点云变得模糊且杂乱,严重影响后续对障碍物的检测、跟踪以及路径规划的准确性。在降雪环境下,激光雷达对车辆、行人等目标的识别率会明显下降,有效探测距离可能缩短十几米甚至更多,目标检测的精度也会大幅降低。
覆盖在激光雷达表面的积雪,也会吸收或散射激光信号,导致激光雷达的有效探测距离缩短,更会削弱点云中物体的强度信息。雪层也可能在地面或环境物体上堆积,改变道路与障碍物的实际几何轮廓,进而使生成的点云与真实世界之间出现偏差。
此外,悬浮在空中的雪花不仅会在空间上引入噪声点,还会干扰点云的强度值(即激光回波的反射强弱信息)。由于雪的反射特性与路面、车辆等常见物体差异显著,其导致的强度信息异常,也会让基于强度的滤波、分类算法变得不稳定。

雪天点云噪声对自动驾驶系统的影响
当激光雷达生成的点云因雪天干扰而掺杂大量噪声时,自动驾驶系统的环境感知模块会受到一系列连锁影响。
在目标检测环节,过多的噪声点会干扰障碍物识别算法。系统可能将无意义的雪点误判为障碍物,引发不必要的制动或避让;同时,真实的障碍物也可能被淹没在杂乱的点云中,导致自动驾驶系统对行人、车辆及交通设施等重要目标的漏识别,严重影响行驶安全。
噪声点还会干扰点云配准与车辆定位算法。有些自动驾驶系统依赖实时点云与高精地图的匹配实现精准定位。若点云中掺入大量雪噪点,匹配过程的准确性便会下降,车辆可能因此发生定位漂移,甚至失去对自身位置和行驶路径的准确理解。
此外,雪噪声还会改变点云的整体密度分布。雪花造成的虚假反射点会使点云密度在不同区域呈现不规则变化,这种不均匀性不仅影响障碍物距离的估计精度,也会干扰如点云聚类与场景分割等依赖密度一致性进行操作的感知算法,进而降低环境建模的可靠性。

如何处理雪天点云噪声
为应对雪天对激光雷达点云的干扰,常见的解决方案主要从数据预处理阶段的噪声过滤与提升感知模型对雪噪的鲁棒性两方面入手。

图片源自:网络
在数据预处理阶段,可通过基于点云特征的过滤方法直接抑制噪声。这类方法的核心思路基于雪花反射点具有离群、强度低或分布异常等特性,根据点云的空间分布、强度值或者统计特性,把可能来自雪花的点识别并剔除掉。例如把那些离传感器很近、反射强度很低或者分布特性跟周围点很不一致的点标记为噪声点并删除。这类方法常见的技术包括统计离群点移除、低强度动态过滤等。通过这种方式,可以在不丢失真实环境点的前提下,大幅减少雪噪声的影响。
除了传统滤波方法,深度学习也被用来处理雪噪声。如有研究基于生成对抗网络(GAN)学习雪天点云与清晰点云之间的映射,从而在输入雪天点云时输出“更干净”的点云。这类方法效果好,但对训练数据的需求较大,而且需要大量不同雪况的数据来提升泛化能力。
还有些研究则关注于特征补全与重构,利用模型推断丢失的真实环境点,从而弥补点云中因雪干扰丢失的环境信息。这种特征补全不仅能减少噪声干扰,还能提升在雪天条件下的检测准确性。
在实际应用时,为了兼顾实时性与感知质量,会采用多层次融合的处理策略,即先使用轻量快速的滤波算法进行初步去噪,再结合深度学习模型进行细粒度清理与信息补全。这种组合方式能够在雪天环境下更可靠地恢复出可用于定位、检测与规划的高质量点云数据。

传感器融合与多模态感知的价值
考虑到单纯依赖激光雷达在雪天会面临明显的感知局限,现阶段的自动驾驶系统会采用多传感器融合方案以提升环境感知的鲁棒性。毫米波雷达因其对雪、雨等降水颗粒的较强穿透能力,能在激光雷达受雪花干扰时,仍提供相对稳定的目标距离与速度估计,因此成为重要的互补信息来源。同时,摄像头可提供丰富的颜色与纹理信息,辅助系统识别被积雪部分覆盖的车道线、交通标志等视觉要素。

图片源自:网络
通过将激光雷达、毫米波雷达与摄像头的数据进行融合,系统能够在单一传感器受天气影响时,依靠其他传感器填补信息缺口,从而维持整体感知的连续性与可靠性。这种多源信息融合的策略,已成为自动驾驶应对复杂天气的关键技术。
此外,针对传感器表面的积雪问题,还可以辅以加热、气吹或喷淋清洗等机械式防护措施,尽可能保持光学窗口与雷达罩的清洁,从物理层面减少雪、冰对信号接收的直接干扰。

最后的话
雪天对激光雷达点云的影响是多方面的,它不仅会带来大量噪声点,还会影响目标检测和定位。对此,可通过噪声过滤、模型补全、多传感器融合等方法减轻这些问题,但要达到像晴天一样稳定的感知效果仍然是一个挑战。随着算法和传感器技术的进步,未来自动驾驶在雪天环境下的鲁棒性会逐步提升。
审核编辑 黄宇
-
激光雷达
+关注
关注
982文章
4548浏览量
197081 -
自动驾驶
+关注
关注
794文章
14987浏览量
181494
发布评论请先 登录
固态激光雷达参数以及避障视频
为什么自动驾驶激光雷达点云中间是黑洞?

激光雷达点云中的空洞现象是什么原因导致的?
如何解决激光雷达点云中“鬼影”和“膨胀”问题?

激光雷达点云为什么会出现吸点现象?
激光雷达点云中“鬼影”和“膨胀”是什么原因导致的?
如何为自动驾驶汽车选择一款合适的激光雷达?

中科亿海微SoM模组——激光雷达控制板

纳芯微栅极驱动器NSD2017在激光雷达应用中PCB设计的注意点

自动驾驶里的激光雷达有何作用?


全固态激光雷达为什么迟迟未来?其技术难点是什么?
第三方激光雷达ASIC方案,能改变行业格局吗?
激光雷达在自动驾驶领域中的优势

自动驾驶激光雷达:原理、类型与应用梳理




评论