 激光雷达点云为什么会出现吸点现象?
激光雷达点云为什么会出现吸点现象?

[首发于智驾最前沿微信公众号]相信各位在开车时一定遇到过这么一个场景,有一个很小的障碍物在车前,当障碍物非常靠近车辆时,你在驾驶位置上是完全看不到的,这就是俗称的“盲区”。对于激光雷达来说,也会出现类似的问题,当障碍物离激光雷达足够近时,它也会出现“盲区”,这一现象被称为“吸点”。
什么是“吸点”现象
自动驾驶激光雷达的工作原理,是通过持续发射激光脉冲,并接收从物体表面反射回来的信号,根据激光脉冲往返的时间来计算距离。这些反射回来的测量值经过累积和处理,便形成了一层层的点云图,从而帮助自动驾驶系统感知周围的三维环境。
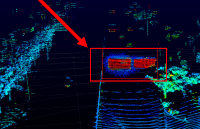
然而,激光雷达在近距离测量中存在一个固有局限,即最小有效测量距离。在这个距离以内,由于反射信号过强或过近,可能超出接收器和处理电路的正常预期范围,导致系统无法稳定处理返回的信号。此时获取的点云数据会出现波动,表现为有时能探测到、有时又消失,或者测距结果异常。这种现象就被称为“吸点”。在点云图中,它体现为在本该密集分布点的区域,出现数据不连续、严重缺失,甚至完全无法探测到的现象。
这种问题,常与行业里另外一种近距离问题“空洞”一起讨论,二者根源相似,都是由于激光雷达在极近范围内测量不稳定,导致点云图像出现不规则的缺损区域。
为什么会出现吸点问题
要理解“吸点”现象,首先要了解激光雷达的信号处理方式。激光雷达的信号处理其实是遵循固定节奏的,每次发射一束激光后,都会等待一段预设时间再开始监听返回信号,然后再进行下一次发射。
这个过程中,电子、光学及数字处理环节均需要一定的准备时间。如果目标物体距离过近,返回信号到达过快,且其能量可能过强或反射特性超出预期,系统可能尚未完成对当前信号的稳定接收与处理,就已进入下一个脉冲周期。这就导致激光雷达采集到的近距离数据断断续续,甚至完全丢失。简单概述就是,由于发射与接收的节奏失配,过近的信号反而无法获得稳定、准确的数据。
激光雷达的接收器设计也会根据特定测量范围进行优化,其具备最小测量距离和最大有效距离两个边界,这一边界由硬件性能与算法逻辑共同决定。当目标物体处于最小测量距离以内时,便进入了设计上的近距“盲区”。在此区域内,并不是所有反射信号都能被有效捕获,返回的信息有时被判定为噪声,有时被过滤掉,有时则被不稳定地记录,这些都会导致点云中出现“吸点”。
此外,物体的反射特性也可能产生吸点问题。不同材质、不同角度的表面反射回来的信号强度各异。在近距离条件下,这类反射特性更容易超出激光雷达既有的滤波与信号判定逻辑的适用范围,从而导致处理单元误判或丢弃部分返回信号。
吸点对自动驾驶有什么影响
自动驾驶依赖于感知系统对周围环境位置与形状的准确感知,若激光雷达在近距离对障碍物测量不准或出现“看不见”的情况,系统获得的点云便不完整。如当车辆前方存在行人或路缘时,若在近距离内丢失这些物体的点云,感知算法就可能误判其位置、尺寸,甚至将该区域误识别为空白。这将直接影响后续的跟车距离估计、避障决策与路径规划。
吸点现象在拥堵路况、低速跟车、城市避障等场景中尤为突出,因为此时车辆之间、车辆与障碍物之间经常处于近距离范围内。若激光雷达无法可靠呈现近处物体,自动驾驶系统就可能低估实际距离,导致反应策略趋于保守、响应迟缓,或错误触发制动。
“吸点”现象也会对多传感器融合方案产生影响。当前许多自动驾驶系统并不是单一依赖激光雷达,而是将其与摄像头、毫米波雷达等传感器组合使用。若激光雷达在近距离存在盲区,该部分的信息缺失就需要依靠其他传感器弥补,而这些传感器各自也具有物理特性与感知原理上的固有局限,这就会使得整体融合系统的设计与校验变得复杂。
怎么解决或缓解“吸点”问题
其实吸点问题的出现,从根本上看就是硬件的问题,可通过优化发射与接收模块、改进快速开关与提升电子处理速度,让激光雷达系统对近距离返回信号的响应更快,从而有效压缩盲区的物理宽度。
除了硬件,算法上也可以改进,可通过后处理技术来补偿近距离丢失的数据。一些方法会对检测到的点云缺失部分,利用邻近点插值、模型预测等方式进行“修复”,使点云在近距区域看起来更连续、完整。这类修复并非凭空捏造,而是基于周围有效的点云数据及其空间几何关系所做的合理估计。
此外,还可以在车辆上合理布置多个激光雷达或配合其他传感器,从系统层面减少对单一传感器视角的依赖。多个激光雷达从不同角度观测同一近距离目标,能够实现交叉补盲,使一个激光雷达盲区内的目标被另一个雷达捕捉到,从而在整体上避免漏检。虽然这会增加系统成本,但在对安全性要求极高的自动驾驶系统中,这已成为一种常见的设计选择。
虽然前文提及过传感器融合会使整体融合系统的设计与校验变得复杂,但传感器融合依旧是最稳妥的提升鲁棒性的方法。像是摄像头、毫米波雷达等传感器,它们各有优势和局限,摄像头能提供丰富的近距离颜色与纹理信息,毫米波雷达对天气干扰不敏感,它们与激光雷达协同工作,能让系统的环境评估更为稳健。将激光雷达与这些传感器的数据进行合理融合,可以相互弥补各自的盲区与噪声问题。
最后的话
激光雷达的吸点现象,说白了就是近距离范围内点云出现了不稳定甚至缺失的情况,它源于激光雷达的设计边界、信号处理节律以及近距信号返回特性。在自动驾驶这样的高安全场景里,这种近距盲区会让感知系统对障碍物的判断变得不准确或遗漏,从而影响安全决策,但随着技术进步,这类近距测量不足的限制会越来越小。
-
激光雷达
+关注
关注
983文章
4595浏览量
197399 -
自动驾驶
+关注
关注
795文章
15056浏览量
181989
发布评论请先 登录
万线激光雷达是依托什么技术实现的?

固态激光雷达参数以及避障视频

为什么自动驾驶激光雷达点云中间是黑洞?

激光雷达点云中的空洞现象是什么原因导致的?
灰尘是如何影响激光雷达识别效果的?

如何解决激光雷达点云中“鬼影”和“膨胀”问题?

激光雷达点云中“鬼影”和“膨胀”是什么原因导致的?
如何为自动驾驶汽车选择一款合适的激光雷达?

激光雷达为什么会出现串扰的问题?

中科亿海微SoM模组——激光雷达控制板

纳芯微栅极驱动器NSD2017在激光雷达应用中PCB设计的注意点

自动驾驶里的激光雷达有何作用?

如何使用自动驾驶激光雷达获得的点云图进行障碍物识别?




评论