 为什么自动驾驶激光雷达点云中间是黑洞?
为什么自动驾驶激光雷达点云中间是黑洞?

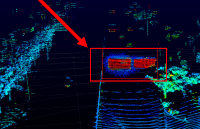
[首发于智驾最前沿微信公众号]不知道大家看到激光雷达探测到的点云时,有没有注意到一个现象,那就是在三维点云图像中会有一个圆形的“真空带”中心。
无论车辆周边的交通环境多么复杂,点云图中靠近汽车底盘和车身周围几米的范围内,是没有任何数据点分布的空洞区域。
这种现象并不是传感器故障,也不是激光无法照射到地面,而是激光雷达的物理特性、安装几何限制、光学收发架构以及后端算法处理逻辑等多个因素共同导致的必然结果。
这个“盲区”的大小直接影响了车辆对马路牙子、低矮宠物或散落路面碎片等近场障碍物的感知能力。

视野的物理边界与安装几何的制约
激光雷达之所以无法在靠近车身的地方产生点云,主要原因是其垂直视场角的物理张角限制。现阶段的车载激光雷达,特别是传统的机械旋转式雷达,其发射的激光束并不是呈全球体覆盖,而是具有特定的垂直视场角范围。
以常见的车载机械雷达为例,其垂直视场角通常在30度到40度之间,且这些光束会以水平方向为基准,向上和向下分布一定的角度。
当我们将雷达安装在车顶,即离地高度约1.8米到2米的位置时,最下方的一束激光与垂直地面的法线之间会存在一个明显的夹角。
根据基础的三角几何关系,激光是沿直线传播的。在最下层激光束射向地面的过程中,由于其出射角度无法垂直向下,在光束触及地面之前,雷达下方的空间就形成了一个无法被覆盖的倒锥形阴影区。
如果激光雷达安装在车顶正中央,且其最下层扫描线的下偏角不足,那么在车辆四周就会出现一个半径达数米的地面盲区,在这个区域内,任何高度低于激光光路的物体都无法产生反射信号。
对于乘用车而言,如果安装高度在0.8米左右,且没有采取特殊的倾斜安装措施,前方地面的首个探测点可能出现在3米开外,这意味着保险杠正前方3米内的地面信息将是完全缺失的。
| 安装位置 | 安装高度(H) | 最下层激光下偏角(θ) | 地面首个探测点距离(D=H/tanθ) | 近场感知特征 |
| 重型卡车顶部 | 3.5m | 15° | 约13.06m | 巨大的近场空洞,极度危险 |
| 乘用车顶 | 1.8m | 25° | 约3.86m | 无法识别近处行人及障碍物 |
| 车头格栅 | 0.6m | 30° | 约1.04m | 覆盖改善,但仍有车头死角 |
| 车身补盲位 | 0.5m | 60° | 约0.29m | 极小的近场空洞,能识别路缘 |
不同配置下的理论盲区距离
除了高度与角度,车辆自身的遮挡也是导致空洞的重要因素。由于激光雷达安装在车顶或车头,其扫描路径必然会被车顶边缘、引擎盖或者后视镜所阻挡。
为了防止这些固定的车身结构在点云中产生干扰,工程师会根据车辆的物理轮廓,在雷达的扫描范围内划定一个“自车过滤区”。
任何落入该区域的点,即便真实存在,也会在数据预处理阶段被软件算法直接剔除,这进一步放大了点云图中的空白感。

光学收发架构带来的探测盲区
除了安装位置,激光雷达内部的光学收发设计也决定了它会存在一个物理上的最小探测距离。激光雷达的工作核心是飞行时间(ToF)原理,通过测量激光脉冲发射到接收反射光的时间差△t来计算距离,公式表达为R=c×△t/2,其中c为光速。
在极短距离内,这个时间差非常小,这对传感器的电子响应速度提出了严苛要求。如果物体距离雷达太近,往返时间可能短于探测器从发射状态切换到接收状态所需的物理时间,导致信号无法被捕获。
激光雷达的光学架构主要分为同轴(Monostatic)和旁轴(Bistatic)两种形式。在同轴设计中,发射光路和接收光路共用同一个光学孔径。
理论上,同轴系统可以实现从零米开始探测,但在实际操作中,发射瞬间的巨大光能量会在内部光学元件上产生微弱的散射。这种散射光会直接进入高灵敏度的探测器,产生内部回波,导致探测器在发射瞬间处于瞬时饱和或盲秒状态。
为了保护电路并消除干扰,系统必须设置一个短的时间窗来屏蔽发射初期的信号,这在物理上就制造了一个约10厘米到20厘米的探测盲区。
旁轴架构的设计则更加复杂,它的发射镜头和接收镜头在物理空间上是分开的,类似于人的双眼。
只有当物体位于一定距离之外时,发射出的激光光斑才能进入接收镜头的有效视场(FOV)内,这种现象被称为几何重叠。
在极近距离下,反射光斑完全落在接收镜头的盲区内,探测器完全无法感知到信号。旁轴激光雷达的最小有效量程会受到两个镜头之间距离及汇聚角度的限制,导致其在0.5米甚至更近的范围内无法产生可靠的点云。
此外,激光探测器(如雪崩光电二极管APD或单光子雪崩二极管SPAD)本身也具备一定的恢复时间。
当探测器捕捉到一个脉冲后,需要经过一段清零时间才能重新响应下一个信号。对于SPAD探测器,这个恢复时间(Rest Time)一般在400纳秒到1微秒之间。
这意味着如果第一个发射脉冲还未消散时,近距离障碍物的反射光就已到达,探测器将无法对其做出反应。这种电子层面的延迟在微观尺度上解释了为什么点云在紧贴雷达窗口的区域必然是缺失的。

强光饱和与电子电路的处理极限
在实际道路环境中,由于反射光强度随距离的平方反比衰减,近场物体返回的激光能量强度会极其巨大,远超传感器的动态范围。
当一个具有高反射率的物体(如反光背心、洁净的车牌或白色车漆)出现在雷达几厘米到一两米的范围内时,探测器接收到的光功率可能比探测百米外物体时高出数个数量级。
这种极强信号会导致接收电路中的转阻放大器(TIA)瞬间进入饱和区。
一旦放大器饱和,它输出的信号波形就不再是清晰的窄脉冲,而是被削平顶部且发生严重的脉冲拓宽(Pulse Widening)。

图片源自:网络
在时间测量电路看来,这种畸变的波形很难被精确计到,甚至会被误判为背景噪声或干扰信号。
对于一些性能较弱的激光雷达,这种饱和效应会导致近场障碍物在点云中表现为“空洞”或“时有时无”的闪烁现象,感知软件难以据此建立连续的跟踪逻辑,进而可能导致车辆在行驶中出现无故的顿挫感或急刹车。
针对这种饱和问题,虽然开发了诸如多阈值检测、增益自动调节以及饱和波形补偿算法等技术尝试恢复真实的距离信息,但在极端近距离下,光能的汇聚依然可能产生物理层面的干扰。
此外,如果多台自动驾驶车辆在近距离相遇,各自发射的激光脉冲还可能在对方的近场区域造成相互干扰,导致噪点增加,迫使系统通过算法滤除更多不可信的数据,这进一步增强了点云近处“空洞”的视觉特征。

软件层面的车身屏蔽与冗余感知
在了解了物理和电子层面的限制后,我们还需要审视自动驾驶系统中最为关键的一个步骤,自车点云过滤。
在激光雷达全速旋转扫描时,它的视场中必然会包含例如车顶架、引擎盖边缘或后置雷达扫描到的后备箱轮廓等车辆自身的零部件。
如果不加处理,这些固定的金属或塑料表面会产生高密度的点云,在视觉上就像是车辆被包裹在了一层厚厚的碎屑中。
这些“自车点”不仅毫无感知意义,还会对目标识别算法造成严重干扰。
为了解决这个问题,自动驾驶感知系统会根据高精度的车辆三维CAD模型,在雷达坐标系下定义一个禁区。

图片源自:网络
任何位于该禁区内的三维坐标点,在数据进入感知决策层之前就会被过滤算法(如直通滤波器或裁剪滤波器)彻底抹除。
这种算法处理是点云图中心呈现规整空白的最直接推手。由于过滤区通常会比实际车身稍大几厘米以容纳震动带来的误差,因此在点云图中,车辆周围总是环绕着一圈真空。
现阶段的自动驾驶技术正通过硬件层面的创新来进一步缩小这个空洞。像是一些新型的“补盲激光雷达”采用了超广角设计,其最小探测距离被压缩到了5厘米甚至更低。
通过在车身的四个角落嵌入这些小型传感器,系统可以实现真正的全方位三维覆盖,将原本空旷的点云中心填充上真实的地面细节和障碍物轮廓。

最后的话
激光雷达点云中心出现的空洞,是激光雷达在面对物理几何、光学路径以及电信号强度极端变化时,为了保证数据准确性而不得不做出的妥协。
对于感知系统而言,理解并接纳这个空洞,并通过多传感器融合的方式将其填补,是确保自动驾驶汽车在复杂城市道路中安全穿行的技术基石。
审核编辑 黄宇
-
激光雷达
+关注
关注
982文章
4531浏览量
197052 -
自动驾驶
+关注
关注
794文章
14976浏览量
181355
发布评论请先 登录
自动驾驶激光雷达应如何进行标定?

自动驾驶激光雷达无法识别反光背心吗?
4D点云加持,FMCW激光雷达助力自动驾驶更安全可靠

激光雷达点云中的空洞现象是什么原因导致的?
FMCW和ToF激光雷达,哪种更适合自动驾驶?
自动驾驶激光雷达会伤害人体吗?

如何解决激光雷达点云中“鬼影”和“膨胀”问题?

激光雷达点云中“鬼影”和“膨胀”是什么原因导致的?
如何为自动驾驶汽车选择一款合适的激光雷达?

自动驾驶里的激光雷达有何作用?

自动驾驶激光雷达可以安装在哪些位置?
决定自动驾驶激光雷达感知质量的因素有哪些?

自动驾驶只用激光雷达进行感知会有哪些问题?
自动驾驶激光雷达之间会相互干扰吗?
激光雷达在自动驾驶领域中的优势




评论