 焊接机器人三菱 Q04DUDV 与冲压机欧姆龙数据采集方案
焊接机器人三菱 Q04DUDV 与冲压机欧姆龙数据采集方案

一、三菱 Q04DUDV(焊接机器人 PLC)数据采集方式
1. 硬件基础与接口
Q04DUDV 是三菱 Q 系列 CPU 模块,内置以太网端口(10/100BASE-TX),支持标准 TCP/IP 通信MITSUBISHI ELECTRIC
可选扩展通信模块:RS-232、RS-422/485 串口,CC-Link、DeviceNet 等现场总线模块
内置数据记录功能:无需编程即可将数据以 CSV 格式保存到 SD 卡,适合离线数据采集MITSUBISHI ELECTRIC
2. 核心通信协议
| 协议类型 | 适用场景 | 特点 |
|---|---|---|
| 三菱 MC 协议(MELSEC Communication) | 以太网主选方案 | 三菱私有协议,支持二进制 / ASCII 两种格式,读写 PLC 寄存器速度快 |
| Modbus TCP | 兼容第三方系统 | 标准工业协议,通过 GX Works2 配置即可启用,适合对接 SCADA/MES |
| OPC UA | 工业物联网首选 | 跨平台、跨系统数据交互标准,支持安全认证和复杂数据结构 |
3. 采集步骤(以太网方式)
PLC 端配置:在 GX Works2 中设置 IP 地址(如 192.168.1.10)、子网掩码、网关
通信参数设置:启用 MC 协议或 Modbus TCP 功能,设置端口号(默认 MC 协议 5006,Modbus 502)
数据点映射:确定需采集的寄存器地址(如 D 区、M 区、Y 区),例如:
焊接电流:D100
焊接电压:D102
机器人位置:D200-D208
运行状态:M10.0(运行)、M10.1(报警)
工业网关对接:深控技术工业网关通过 MC 协议驱动连接 PLC,配置 IP 和端口,设置采集频率(1ms~1s)
数据上传:网关将采集数据转换为 MQTT/HTTP 协议,上传至物联网平台或本地服务器
二、欧姆龙冲压机数据采集方式
1. 硬件与接口特点
冲压机通常配备欧姆龙CP1E/CJ/NJ/NX 系列 PLC,控制冲压动作和安全系统
主流接口:以太网(内置或扩展模块)、RS-232C/RS-485 串口、DeviceNet 总线
部分机型支持EtherNet/IP和PROFINET,适合工业 4.0 场景
2. 核心通信协议
| 协议类型 | 适用场景 | 特点 |
|---|---|---|
| FINS 协议(Factory Interface Network Service) | 欧姆龙设备主选 | 欧姆龙私有协议,支持 TCP/UDP 两种传输方式,可跨网络通信 |
| Host Link 协议 | 串口通信方案 | 传统串口协议,适合老旧设备,通过 RS-232/485 连接 |
| Modbus RTU/TCP | 兼容第三方系统 | 标准协议,通过 PLC 编程或模块配置启用,适合对接 HMI 和物联网设备 |
3. 采集步骤(FINS TCP 方式)
PLC 端配置:设置 IP 地址(如 192.168.1.12),启用 FINS TCP 功能(默认端口 9600)
数据点规划:确定冲压机关键参数地址,例如:
冲压压力:DM100
滑块行程:DM102
生产节拍:CNT001
模具编号:DM200
故障代码:DM500
网关连接:深控技术网关选择Omron FINS TCP 驱动,输入 PLC IP 和端口,设置数据点映射
软采 vs 硬采:
软采(推荐):通过 FINS 协议读取 PLC 寄存器,无接触、无损耗,不影响设备运行
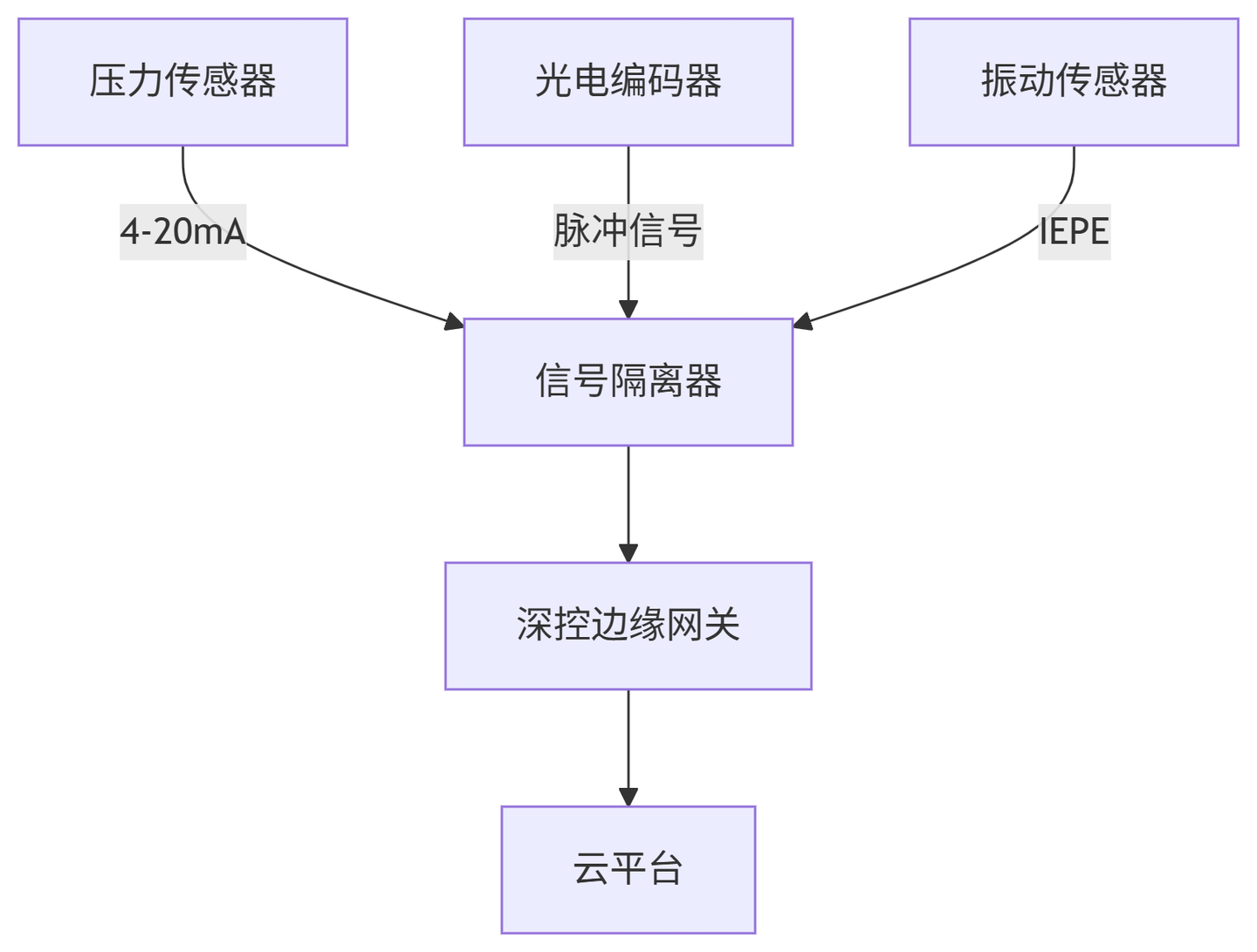
硬采:通过 IO 模块采集传感器信号(如压力传感器 4-20mA 信号),适合无 PLC 或 PLC 无通信接口的老旧设备
数据处理:网关边缘计算功能可进行数据清洗、过滤、报警阈值判断,再上传至平台
三、联合采集与系统集成方案
1. 统一采集架构
焊接机器人(三菱Q04DUDV) ──(MC协议)─┐
├─ 深控工业网关 ──(MQTT)─→ 物联网IOT平台
冲压机(欧姆龙PLC) ─────(FINS协议)───┘
2. 关键技术优势
协议自动识别:深控网关内置 1000 + 工业协议库,自动识别三菱 MC 和欧姆龙 FINS 协议,无需手动配置点表
高精度同步采集:支持毫秒级数据采集,确保焊接和冲压工艺参数的时序一致性
边缘计算能力:在网关端实现数据预处理(如异常值剔除、单位转换、数据聚合),减轻平台负担
安全保障:支持 PLC 通信加密、数据传输加密(TLS/SSL)、访问权限控制,符合工业安全标准
3. 典型应用场景
生产监控:实时显示焊接电流 / 电压、冲压压力 / 行程、生产计数等关键指标
质量追溯:记录每批次产品的工艺参数,生成质量报告
预测性维护:通过分析设备振动、温度、能耗数据,提前预警潜在故障
效率优化:分析生产节拍、设备利用率,找出瓶颈,提升 OEE(设备综合效率)
总结
三菱 Q04DUDV 焊接机器人采用MC 协议(首选)或 Modbus TCP 进行数据采集,通过以太网与工业网关连接;欧姆龙冲压机则以FINS 协议(首选)或 Host Link/Modbus 为主,同样通过以太网或串口实现数据传输。深控技术工业网关可无缝对接这两种设备,实现协议转换、数据标准化和边缘计算,为工业物联网应用提供完整的数据采集解决方案。
三菱 Q04DUDV(焊接机器人)+ 欧姆龙冲压机 数据采集参数模板
说明
寄存器地址为示例值,需根据现场 PLC 实际程序调整
采集频率根据参数实时性需求设定,兼顾数据有效性与网关负载
协议优先选择设备私有协议,保障通信稳定性与数据完整性
一、 三菱 Q04DUDV(焊接机器人)采集参数表
| 序号 | 参数名称 | 寄存器地址 | 数据类型 | 采集频率 | 通信协议 | 备注(含义 / 用途) |
|---|---|---|---|---|---|---|
| 1 | 机器人运行状态 | M10.0 | 布尔型 | 1s | MC 协议 | 0 = 停止,1 = 运行;用于设备状态监控 |
| 2 | 机器人报警状态 | M10.1 | 布尔型 | 1s | MC 协议 | 0 = 正常,1 = 报警;触发平台告警推送 |
| 3 | 焊接电流实际值 | D100 | 16 位整型 | 500ms | MC 协议 | 单位:A;需与工艺标准值对比 |
| 4 | 焊接电压实际值 | D102 | 16 位整型 | 500ms | MC 协议 | 单位:V;监控焊接工艺稳定性 |
| 5 | 焊接时长 | D104 | 16 位整型 | 1s | MC 协议 | 单位:ms;记录单次焊接周期 |
| 6 | 生产累计计数 | D200 | 32 位整型 | 10s | MC 协议 | 统计当日 / 当月焊接工件总数 |
| 7 | 故障代码 | D500 | 16 位整型 | 1s | MC 协议 | 对应机器人故障手册,用于快速排查 |
| 8 | 模具当前编号 | D300 | 16 位整型 | 30s | MC 协议 | 识别当前使用焊接模具规格 |
二、 欧姆龙冲压机(PLC 以 CJ 系列为例)采集参数表
| 序号 | 参数名称 | 寄存器地址 | 数据类型 | 采集频率 | 通信协议 | 备注(含义 / 用途) |
|---|---|---|---|---|---|---|
| 1 | 冲压机运行状态 | CI0.0 | 布尔型 | 1s | FINS TCP | 0 = 待机,1 = 冲压运行 |
| 2 | 急停 / 故障状态 | CI0.1 | 布尔型 | 1s | FINS TCP | 0 = 正常,1 = 急停 / 故障;优先级告警 |
| 3 | 冲压压力实际值 | DM100 | 16 位整型 | 500ms | FINS TCP | 单位:bar;监控冲压工艺压力 |
| 4 | 滑块行程位置 | DM102 | 16 位整型 | 500ms | FINS TCP | 单位:mm;反馈冲压执行到位情况 |
| 5 | 单次冲压周期 | DM104 | 16 位整型 | 1s | FINS TCP | 单位:ms;计算生产节拍 |
| 6 | 生产累计计数 | DM200 | 32 位整型 | 10s | FINS TCP | 统计冲压工件总产量 |
| 7 | 模具磨损计数 | DM300 | 16 位整型 | 1s | FINS TCP | 累计冲压次数,用于模具维护提醒 |
| 8 | 油温 / 设备温度 | DM400 | 16 位整型 | 5s | FINS TCP | 单位:℃;预防设备过热故障 |
审核编辑 黄宇
-
数据采集
+关注
关注
42文章
8322浏览量
121247 -
焊接机器人
+关注
关注
16文章
362浏览量
16009
发布评论请先 登录
基于以太网通讯的欧姆龙CP系列PLC与西门子触摸屏集成方案在汽车行业中的应用研究

欧姆龙CP系列PLC通过以太网模块和西门子触摸屏上位机通讯在汽车零部件生产系统经典应用案例

基于BL350平台的焊接机器人智能控制与质量追溯解决方案
嵌入式计算机AF208:焊接机器人高效精准作业的核心引擎

欧姆龙冲压机PLC拓展模块物联网数据采集:全流程标准化解决方案 冲压机PLC拓展模块物联网数据采集:全流程

转EtherCAT网关在欧姆龙PLC与三菱伺服精密装配通讯中的改造实践

EtherCAT网关在欧姆龙PLC与三菱伺服精密装配通讯中的改造实践

DeviceNet 转 Ethernet/IP三菱 Q 与欧姆龙 CJ2M PLC 封口金属检测交互

工业显示器在焊接机器人中的应用

开疆智能ModbusTCP转Devicenet网关连接三菱PLC与ABB机器人配置案例

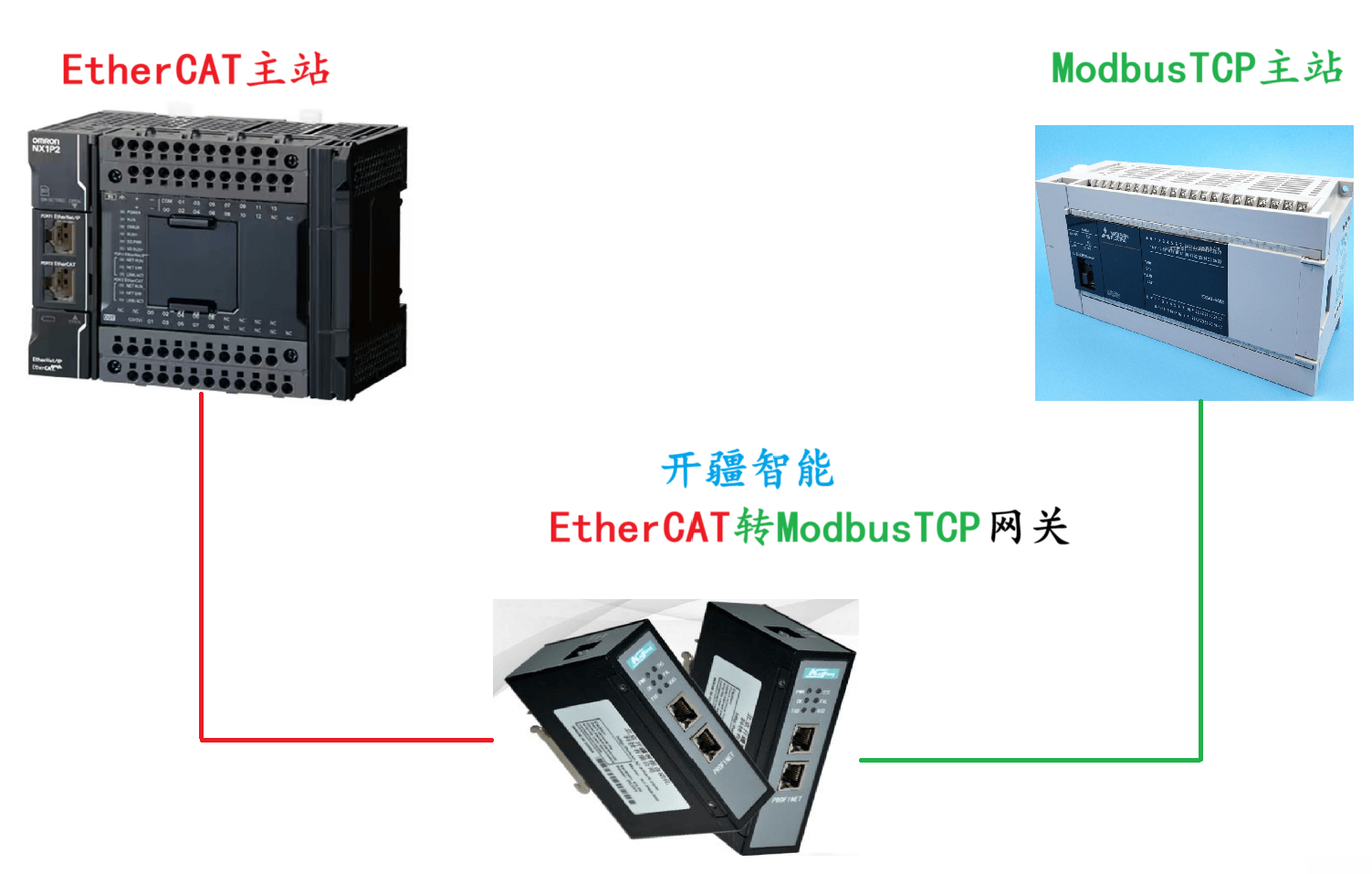
开疆智能EthereCAT转ModbusTCP网关连接欧姆龙及三菱PLC案例
工业智能网关能从安川机器人中采集哪些数据

欧姆龙PLC(网口/串口)如何采集数据




评论