 激光雷达点云能分清地面和水面吗?
激光雷达点云能分清地面和水面吗?

[首发于智驾最前沿微信公众号]自动驾驶系统想“看清”周围的世界,可通过多个传感器来完成,激光雷达由于可以提供丰富的三维点云信息,一直是很多方案的主要选择。激光雷达的工作原理也非常简单,其不断发射激光脉冲,激光遇到物体后反射回传感器,通过测量激光来回的时间,就可以计算出物体到车辆的距离。
这样重复数百万次,还能生成一堆具有空间坐标的点,也就是大家熟知的点云,这些点组成了周围环境的三维模型。点云里不仅有路面、建筑、行人,也有树木、车辆甚至交通标志。这些三维点云就是自动驾驶系统理解和交互现实世界的重要基础。
图片源自:网络
在自动驾驶的感知链路里,点云数据要经过噪声过滤、坐标转换、地面点分割等预处理,这些步骤可以帮助车辆将原始数据整理成更有意义的信息。地面点是一个特别重要的类别,它能帮助自动驾驶系统理解可行驶区域和障碍物边界。
激光雷达的每一个返回点都包含三个基本量,即横坐标X、纵坐标Y以及高度Z。有时还会记录激光的回波强度值,这个值反映了激光与表面材料的反射强弱。不同材质对激光的反射强度不一样,但这比起距离信息来说更容易受到角度、表面状态等因素影响,因此常被作为辅助特征。

地面与非地面的基本区分逻辑
在点云处理中,一个很常见的任务是“地面分割”。所谓地面分割,就是把代表路面、裸地、草地等的点,从点云中挑出来,把非地面点(比如车辆、行人、树木等)单独留出来,这样可以让后续的目标检测、碰撞规避等算法处理起来更清晰。很多算法是根据点的高度变化、邻近点的坡度关系,或是统计整体曲率等来判定一个点是不是地面。如基于斜率的算法,会将激光点沿一个方向排列,通过它们高度差与一定阈值比较找到相对平坦且连续的点云区域,这类区域一般就代表地面。
这些地面分割方法在城市道路场景里很常见,是自动驾驶感知的基础步骤。分割好地面点后,非地面点就可以被聚类,进一步识别为车辆、行人、栏杆等其他物体。地面分割的关键在于算法能否正确抓住地面本身连续、低起伏的空间特点。
在理想情况下,地面的高程在一个小区域内是相对平滑且连续的,这便于数学模型将其从点云里分离出来。而且点云分类还可以更精细,除地面之外,还能分类出建筑物、植被、线路、水体等,这在专业点云处理领域是标准做法。美国摄影测量与遥感学会(ASPRS)甚至制定了统一的点云分类标签,其中就编号2表示地面,编号9表示水体等分类。
| 分类值 | 含义 |
| 0 | 已创建,从不分类 |
| 1 | 未分配 |
| 2 | 地面 |
| 3 | 低植被 |
| 4 | 中等植被 |
| 5 | 高植被 |
| 6 | 建筑物 |
| 7 | 低点 |
| 8 | 模型关键点 |
| 9 | 水体 |
| 10 | 铁路 |
| 11 | 路面 |
| 12 | 保留 |
| 13 | 钢丝护网(护罩) |
| 14 | 导线(相位) |
| 15 | 输电塔 |
| 16 | 线结构连接器(绝缘体) |
| 17 | 桥板 |
| 18 | 高噪音 |
| 19 | 保留 |
| 20 | 已忽略地面 |
| 21 | 雪 |
| 22 | 时间排除 |
| 23–63 | 保留 |
| 64–255 | 用户自定义 |
ASPRS制定的点云分类标签

水面在激光雷达点云里是如何表现的?
地面和水面虽然看起来都是平的表面,但激光雷达看待它们的方式并不一样。地面对大多数激光雷达常用的近红外激光(波长通常在900–1064nm区间)有比较稳定的反射,因此当雷达脉冲打到硬质地面时,大部分激光能被反射回传感器,形成清晰的点云,这也是地面分割算法能有效的原因。
图片源自:网络
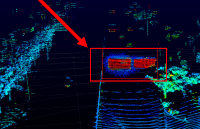
水面对近红外激光的吸收则较强,在平静、清澈的水域,激光脉冲会被水面吸收,难以形成清晰稳定的回波。这在点云中的体现是非常明显的,水面区域会表现为点云稀疏,甚至出现“空洞”,这就是激光雷达未能接收到足够的反射信号导致的。
基于这个原理,地面和水面的区分就会非常明显,如果某个区域的点云非常稀疏,特别是在车辆运动轨迹附近的低洼区域,那么这个区域就有可能是水面,而不是地面。点云分类器在预处理阶段就能利用这种特点来标记潜在的水体区域。当然,这种方法并不完美,因为在实际驾驶场景中,积水、湿滑地面、浅水或泥泞路面也会导致点云稀疏或噪声增多。
当然,如果水面粗糙、有波动或杂质(比如有风、有泡沫、悬浮物),雷达激光会在水面产生散射及反射,这些回波有时候能被激光雷达捕捉到,但这些点一般是分布不规则,噪声多且密度较低的。这跟地面那种规则连续的点云明显不一样。
还有一点需要明确的是,这些来自水面的反射信号与地面等实体表面的稳定回波不同。水面点云大多源于波动、杂质或特定入射角度导致的偶然反射,并不是来自水面本身清晰的几何结构。因此,依靠点云数据区分水面与地面,只能是识别方法的一部分,而不是唯一依据。

为什么仅靠点云本身难以完美区分水面?
点云本身只能反映激光返回的空间点,并不会像摄像头那样反馈颜色、纹理等信息。在区分地面与水面时,如果仅依托激光雷达,很难做到非常完美的区分。
激光雷达是基于激光发射与接收的时间差进行测距的,其信号能否返回、返回的强度与质量,均取决于物体表面的反射特性。水面对近红外激光具有较强的吸收作用,因此在多数情况下,激光在水面无法返回有效信号,导致该位置在点云中呈现为“无数据”的状态。
此外,像被雨水打湿的路面、积水坑洼或泥泞表面等,也会改变激光的反射行为,使点云表现出类似不规则噪声的形态。这使得依赖几何特征的算法很难用统一规则将其归类为水面或地面。简单来说,仅依据点云的几何形状与高度分布,有时难以区分“湿路面”究竟是实心地面上覆盖的积水,还是开放的水体。
激光雷达点云本身也不包含材质或颜色信息,仅提供距离与反射强度两类数据。反射强度虽然可以在一定程度上辅助材质判别,但其受反射角度、表面粗糙度、传感器差异等多种因素影响,因此不能作为稳定可靠的水体或地面判断依据。
正因如此,行业内不会仅依赖激光雷达点云完成水体识别。在完整的自动驾驶系统架构中,还会融合如摄像头图像、毫米波雷达数据及高精地图等其他信息源。摄像头能提供颜色与纹理特征,有助于将点云中的“空洞”区域结合视觉信息进行确认;毫米波雷达在某些场景下对水体也有不同的反射特性,可作为有效的感知补充。通过多传感器融合,系统能够更可靠地识别水面及其它复杂道路状况。

最后的话
激光雷达通过发射激光测量距离,但水面容易吸收激光,常导致信号缺失,在三维点云中呈现空洞。潮湿路面等也会造成干扰激光雷达的点云形成,因此,仅凭激光雷达难以可靠区分水面与地面,需要结合摄像头和毫米波雷达等传感器的数据,共同完成识别。
审核编辑 黄宇
-
激光雷达
+关注
关注
982文章
4548浏览量
197081
发布评论请先 登录
固态激光雷达参数以及避障视频
为什么自动驾驶激光雷达点云中间是黑洞?

激光雷达点云中的空洞现象是什么原因导致的?
如何解决激光雷达点云中“鬼影”和“膨胀”问题?

激光雷达点云为什么会出现吸点现象?
激光雷达点云中“鬼影”和“膨胀”是什么原因导致的?
如何为自动驾驶汽车选择一款合适的激光雷达?

中科亿海微SoM模组——激光雷达控制板

纳芯微栅极驱动器NSD2017在激光雷达应用中PCB设计的注意点

自动驾驶里的激光雷达有何作用?


全固态激光雷达为什么迟迟未来?其技术难点是什么?
第三方激光雷达ASIC方案,能改变行业格局吗?
激光雷达在自动驾驶领域中的优势

自动驾驶激光雷达:原理、类型与应用梳理




评论