 使用恩智浦MCU实现创新人形机器人灵巧手解决方案
使用恩智浦MCU实现创新人形机器人灵巧手解决方案

如此“丝滑”的人形机器人灵巧手,是如何实现的?本文带你一探究竟!
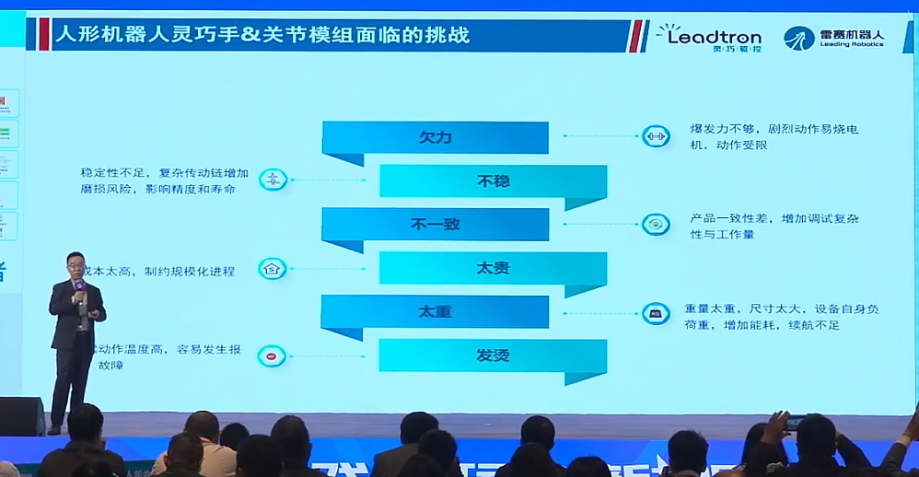
如今,人形机器人无疑是科技王冠上的一颗“明珠”,众多开发者都希望能够将其收入囊中。不过想要让人形机器人加速“进化”,真正从科幻走向现实,还有诸多核心技术难关亟待攻克,“灵巧手”就是其中之一。
针对这一挑战,恩智浦中国的工程师团队在深入剖析市场需求及现有方案优劣势基础上,革新了灵巧手内部通信方式,开发出了一个基于I3C局部总线拓扑的创新的灵巧手解决方案!
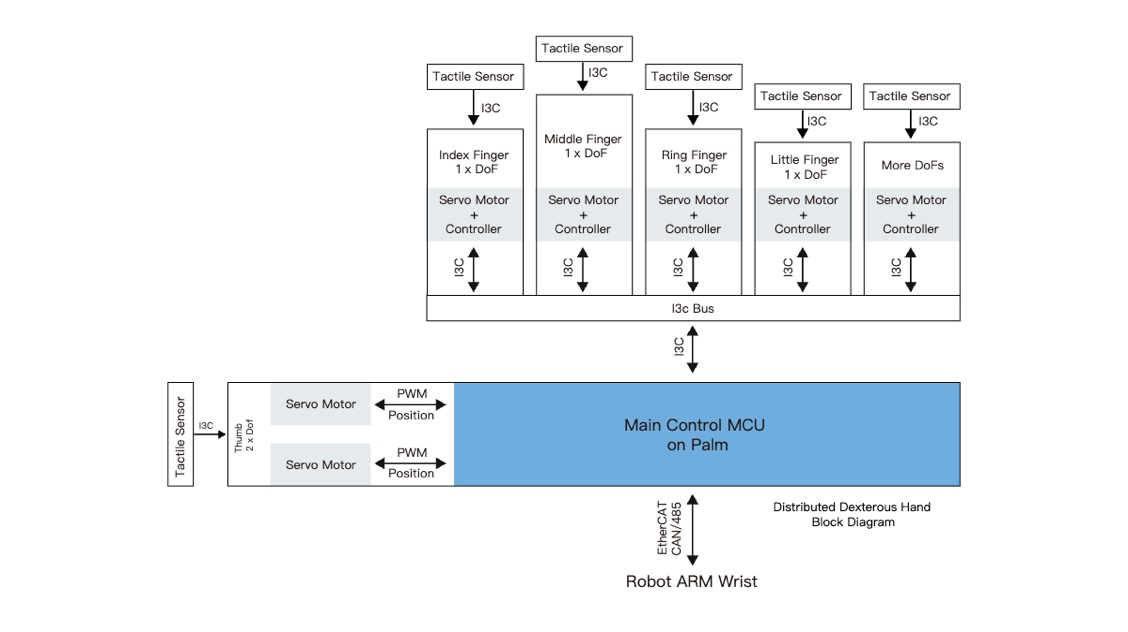
该方案采用具有800MHz Cortex-M7和300MHz Cortex-M33双核架构的i.MX RT1180作为手掌主控MCU,以内置96MHz Cortex-M33的MCX A132MCU作为分布式的手指关节电机驱动控制器。
i.MX RT1180对内通过I3C总线连接多个电机驱动节点与触觉传感器;对外通过EtherCAT / CAN / RS485连接到机器人系统总线。灵巧手内部的I3C总线带宽高达12.5Mbps,无需物理收发器,直接使用TTL电平通信,可以减小板内布局空间。两根通信总线线束少且支持带内中断热插拔,从机地址动态分配兼容I2C,这些特点使其非常适合人形机器人手部应用。
该方案实际应用时的“丝滑”表现,大家可以从本文顶部动图中直观体验。想要了解本方案的更多技术细节,请看以下视频——
总之,恩智浦的i.MX RT1180与MCX A132为这套方案提供了坚实的硬件基础,助力人形机器人实现新的技术突破。
恩智浦团队希望通过这套创新性的I3C总线拓扑方案,推动人形机器人灵巧手系统向更高集成度、更强性能、更广应用场景演进。
全面赋能人形机器人开发
备战人形机器人赛道,恩智浦已经为开发者准备好了完整的解决方案,涵盖从机器人关节、灵巧手到大脑、小脑等各个关键环节,提供从域控、感知到功能安全等全面的赋能技术。
-
恩智浦
+关注
关注
14文章
6141浏览量
155284 -
人形机器人
+关注
关注
7文章
1102浏览量
18572 -
灵巧手
+关注
关注
0文章
58浏览量
352
原文标题:推动人形机器人“进化”,让我们从这双“灵巧手”开始!
文章出处:【微信号:NXP客栈,微信公众号:NXP客栈】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
灵巧手驱动技术深度报告:空心杯电机黄金赛道,高壁垒与高增长并存

人形机器人热度狂飙,工业赛道真正落地的是复合机器人!

SiLM2035EF-7G 200V半桥驱动器,如何以DFN2×2极小封装赋能人形机器人关节电机?
大厂入局人形机器人:NXP、瑞萨和兆易创新推出哪些核心MCU方案?

空心杯电机,为何成为人形机器人灵巧手的 “香饽饽”?

从概念到落地:灵巧手为何是人形机器人产业化的决胜环节?
人形机器人市场火爆!雷赛智能重磅推出“20自由度”灵巧手方案
基于I3C分布式总线架构的人形机器人灵巧手方案
恩智浦基于I3C总线的人形机器人灵巧手解决方案

年均增长64.6%,机器人灵巧手赛道高燃爆发

我国发布全球首款轻量化重载机器人仿生灵巧手

蓝思科技:今年承接智元机器人全系列多款人形机器人业务
虹科分享 功夫机器人来了!CMG擂台之上的技术决胜点是什么?



评论