 空心杯电机,为何成为人形机器人灵巧手的 “香饽饽”?
空心杯电机,为何成为人形机器人灵巧手的 “香饽饽”?

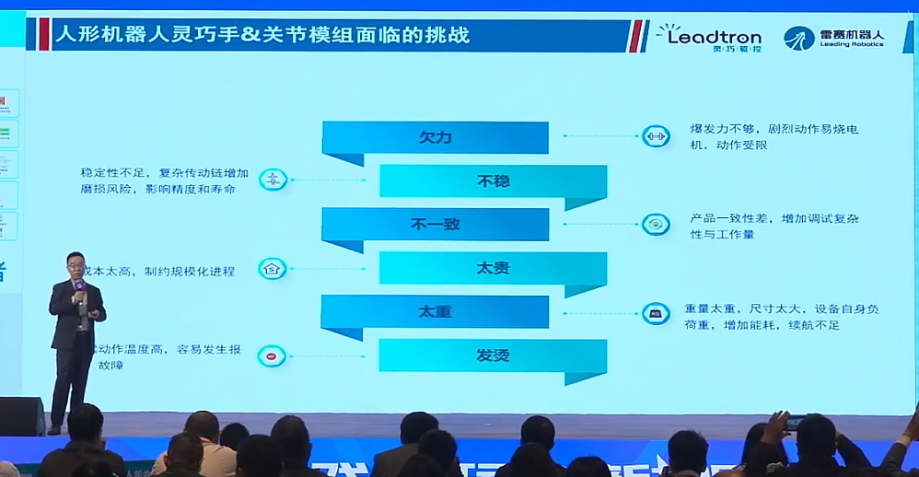
人形机器人的灵巧手,堪称机器人与外界交互的 “魔法之手”,承担着各类复杂而精细的操作任务。从精准抓取微小物件,到灵活完成复杂装配工作,灵巧手的出色表现离不开其内部核心驱动部件—电机的强力支持。在众多电机类型中,空心杯电机脱颖而出,成为当下人形机器人灵巧手的主流之选。这背后蕴含着怎样的奥秘呢?
空心杯电机契合灵巧手需求的卓越特性
1. 轻巧灵动,适配狭小空间
人形机器人的手指空间极为有限,对内部零部件的尺寸和重量要求近乎苛刻。空心杯电机其重量可减轻 30%-50%,体积也相应大幅缩减 ,功率密度显著提升。这种轻量化、小尺寸的特性,使其能够轻松适配灵巧手内部狭小的安装空间,为实现多关节、高自由度的设计奠定了坚实基础。
2. 高效节能,续航保障有力
在实际应用中,机器人需要长时间持续工作,电机的节能性能至关重要。空心杯电机能量转换效率高达 80%-90%,远高于传统铁芯电机70% 左右的转换效率。
这意味着在完成相同任务时,空心杯电机消耗的电量更少,能够有效延长机器人的续航时间,减少充电频次,提高工作效率。以医疗护理机器人为例,其灵巧手频繁执行各种精细操作,高效节能的空心杯电机可确保机器人在长时间工作中保持稳定运行,无需频繁中断工作进行充电,为医护人员提供更持续、可靠的协助 。
3. 迅猛响应,动作行云流水
灵巧手在执行任务时,需要对各种指令做出快速、精准的响应,以实现流畅、自然的动作。在高速运转状态下,其转速调节极为灵敏,能够快速跟踪控制信号的变化。当机器人灵巧手抓取一个正在掉落的物体时,空心杯电机能够在极短时间内做出响应,调整手指的位置和力度,准确无误地完成抓取动作,避免物体掉落 。
4. 运行平稳,操作精准入微
在进行精细操作时,电机的平稳运行和低转矩波动是确保操作精度的关键。空心杯电机在低速运行时也能保持出色的平稳性,振动和噪音极低 。电机产生的转矩均匀分布,能够精准控制转子的位置和转动角度,实现高精度的运动控制。在进行精密装配工作时,机器人灵巧手需要将微小零件准确放置在特定位置,空心杯电机的平稳运行和精准控制能力,可确保零件放置位置的偏差控制在极小范围内,大大提高装配质量和成功率 。
华磁自粘结铁芯在灵巧手空心杯电机上的核心优势集中在更高功率密度、更低损耗与温升、更小振动噪声、更优一致性与可制造性,契合灵巧手对轻量、快速响应、平滑力矩与安静运行的严苛要求。
华磁自粘结铁芯与空心杯电机特性的协同
低惯量与快速响应:自粘结铁芯进一步降低铁损与机械损耗,使启停与轨迹跟踪更快更稳。
平滑力矩输出:无齿槽 +自粘结铁芯的低振动设计,助力力矩波动≤5%的实现。
安静运行与人机安全:NVH 显著改善,适合家庭 / 服务场景。
小型化与集成:叠装系数高、磁桥小,便于在狭小指节内集成多轴驱动。

应用与选型要点
工艺选择:与焊接 / 铆接相比,华磁自粘结更适合超薄硅钢片,能避免局部导通与叠压难题,在高频 / 高速下铁损与励磁电流更低。
设计权衡:关注磁桥尺寸、叠装系数与固化工艺对强度、损耗与温升的耦合影响,结合目标转矩、温升与噪声指标进行优化。
结论:在灵巧手空心杯电机中采用华磁自粘结铁芯,可同时提升功率密度、效率、温升与 NVH,且利于小型化与批量制造,是当前人形机器人灵巧手电机的优选方案。
-
机器人
+关注
关注
213文章
31386浏览量
223542 -
驱动
+关注
关注
12文章
1988浏览量
88683 -
电机
+关注
关注
145文章
9692浏览量
154731
发布评论请先 登录
机器人灵巧手新型电驱动技术:谐波磁场电机与新材料的融合革命

灵巧手驱动技术深度报告:空心杯电机黄金赛道,高壁垒与高增长并存

灵巧手触觉感知技术深度报告:从“单点感知”到“触觉成像”

人形机器人“灵巧手”,正在接近27个自由度的人手

从概念到落地:灵巧手为何是人形机器人产业化的决胜环节?
人形机器人驱动电机精准测试—空心杯电机及无框力矩电机测试解决方案

人形机器人市场火爆!雷赛智能重磅推出“20自由度”灵巧手方案
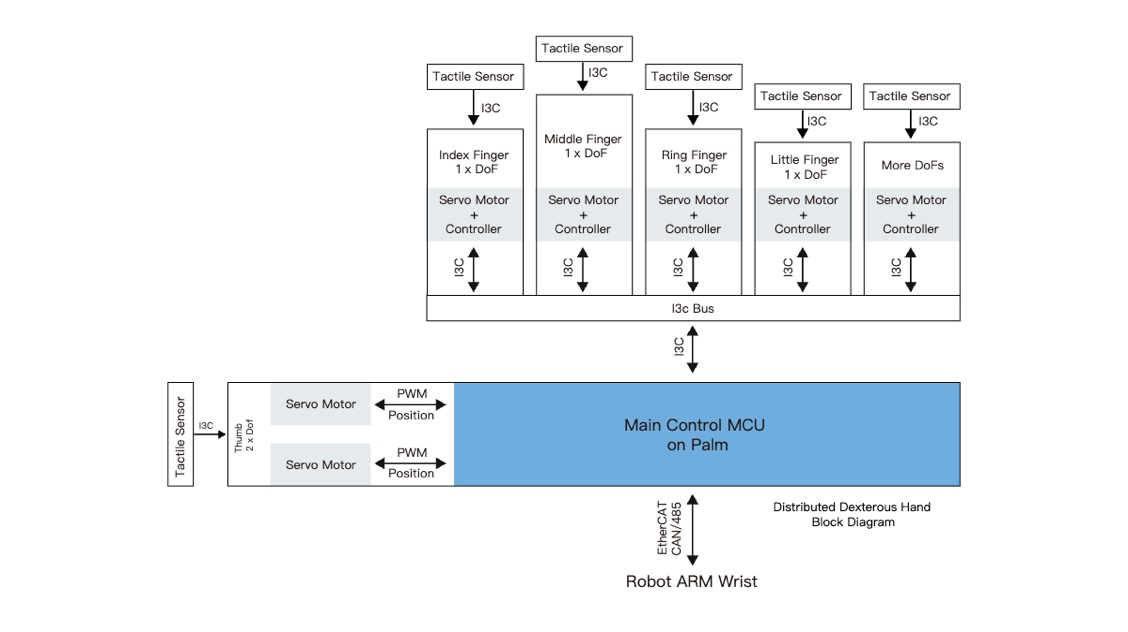
基于I3C分布式总线架构的人形机器人灵巧手方案
年均增长64.6%,机器人灵巧手赛道高燃爆发

我国发布全球首款轻量化重载机器人仿生灵巧手




评论