 EtherCAT转CANopen网关配置:台达PLC与AGV小车高效通信方案
EtherCAT转CANopen网关配置:台达PLC与AGV小车高效通信方案


一、应用背景与挑战
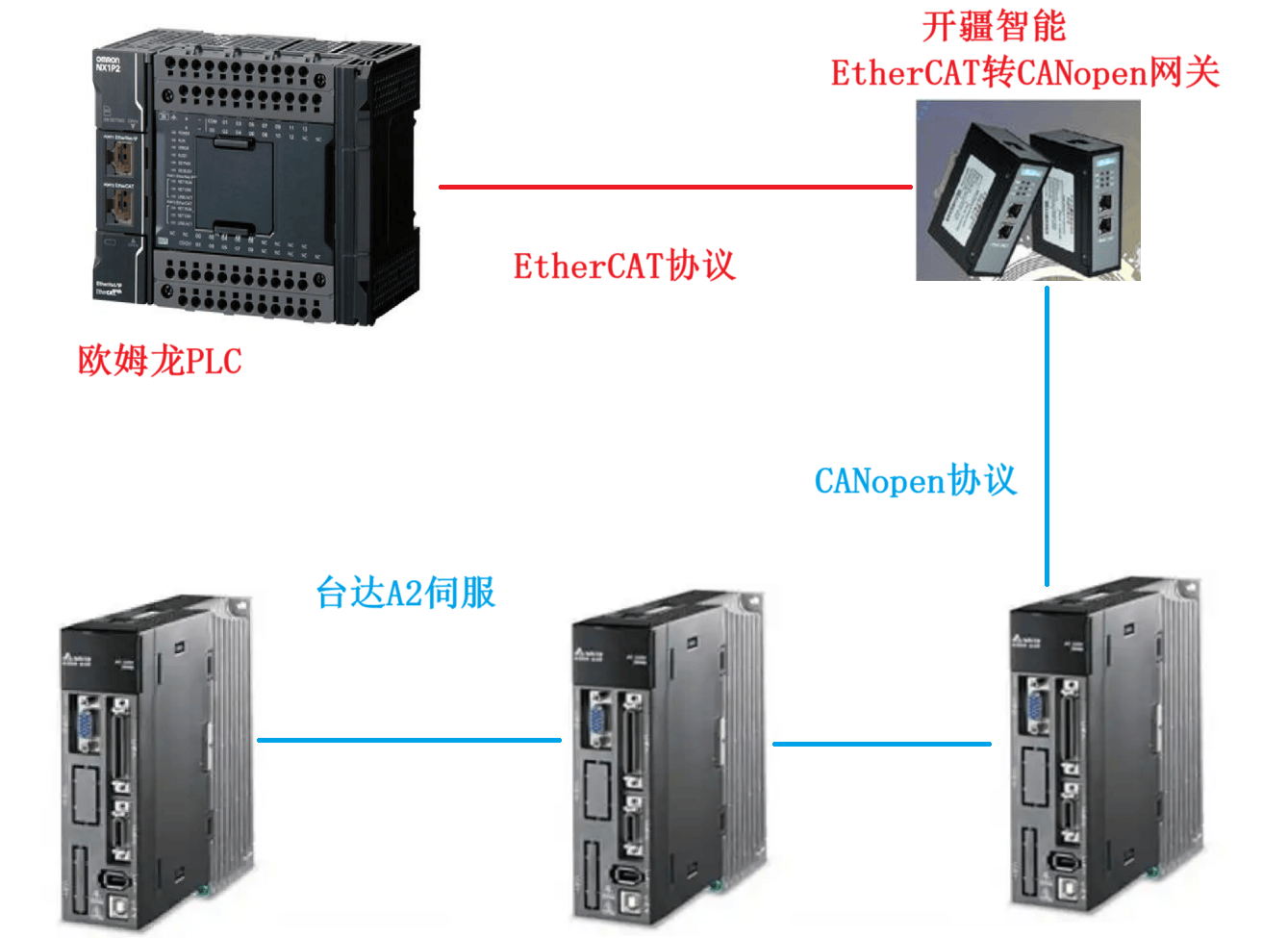
某智能装备制造企业的生产车间面临设备互联难题:新部署的台达ASDA-B3系列高精度运动控制器(EtherCAT主站)需与12台基于CANopen协议的科尔摩根(Kollmorgen)AKD2G系列AGV小车实现实时协同控制。由于EtherCAT与CANopen在物理层、数据帧结构和同步机制上存在本质差异,传统方案需通过PLC中转或更换设备协议模块,导致系统成本增加30%以上且响应延迟超50ms。捷米特JM-ECT-COP协议转换网关的引入,成功实现两种协议的透明传输,使系统响应时间缩短至2ms以内。

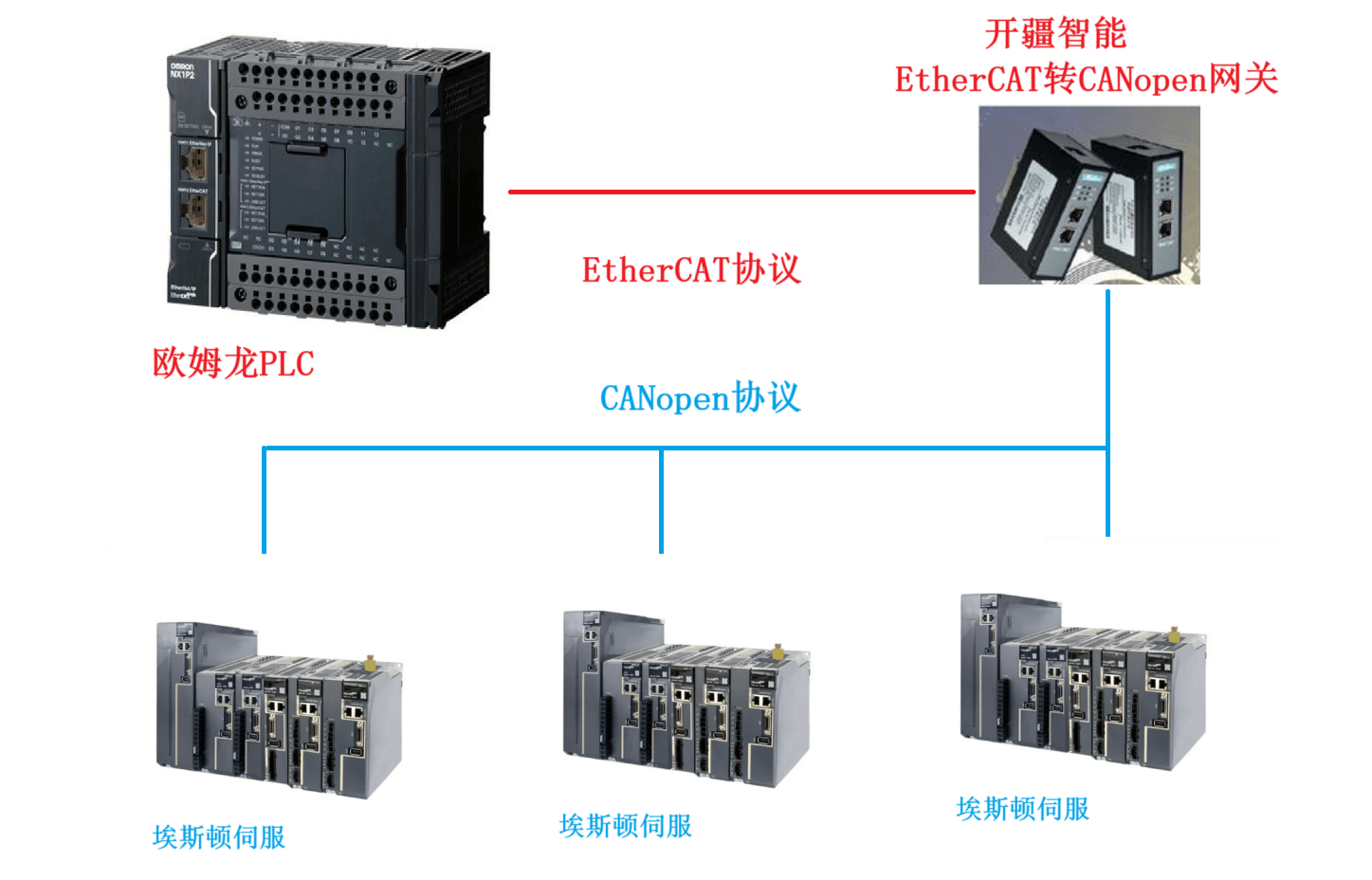
二、系统架构与设备选型
1.主站设备:台达ASDA-B3运动控制器
·技术参数:支持EtherCAT分布式时钟同步,同步精度±1μs,周期时间≤125μs
·功能配置:通过TwinCAT3软件配置4个EtherCAT从站接口,每个接口支持500字节输入/输出数据映射
·控制逻辑:采用结构化文本(ST)语言编写,实现AGV路径规划、避障决策和速度闭环控制
2.从站设备:科尔摩根AKD2GAGV驱动器
·通信特性:符合CANopenDS-402设备规范,支持8个TPDO/RPDO对象,最大波特率1Mbps
·性能指标:峰值扭矩200Nm,速度响应频率2kHz,位置精度±0.01mm
·数据交互:通过TPDO1传输实际位置(0x6064)、实际速度(0x606C),RPDO1接收控制字(0x6040)、目标位置(0x607A)
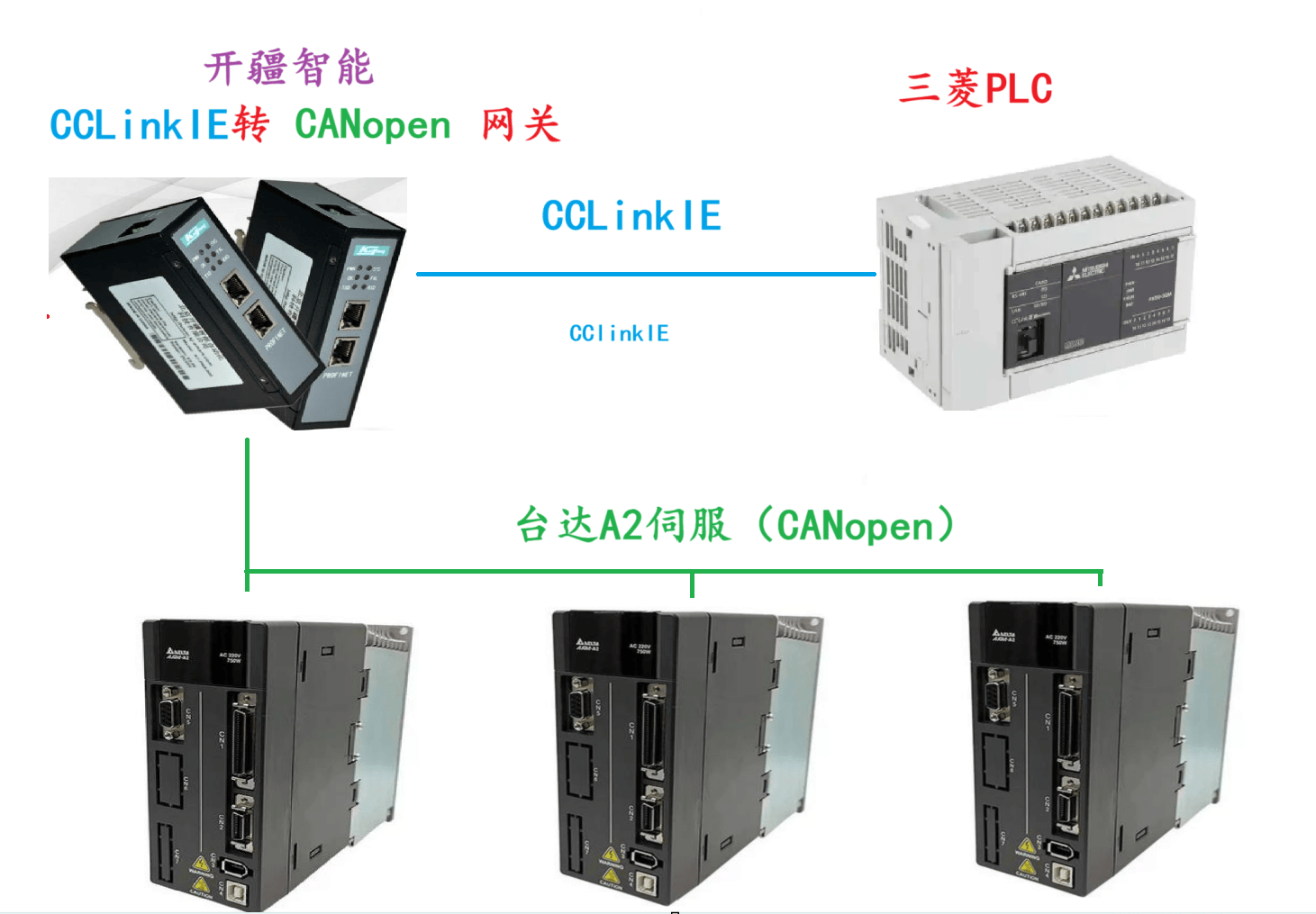
3.协议转换核心:捷米特EtherCAT转CANopen协议转换网关
·硬件规格:
o双接口设计:EtherCAT侧RJ45接口(支持菊花链拓扑),CANopen侧DB9接口(带终端电阻拨码开关)
o环境适应性:-40℃~85℃工作温度,IP40防护等级
o实时性能:EtherCAT循环时间≤100μs,CANopen响应延迟≤50μs
·软件功能:
o支持DS-301/DS-402协议栈
o动态PDO映射表(最大512个对象)
o心跳检测与故障自恢复机制
三、EtherCAT转CANopen协议转换实施过程
1.硬件部署与拓扑设计
·EtherCAT网络:采用台达控制器作为主站,通过超五类屏蔽双绞线连接JM-ECT-COP网关(作为第3号从站),网络末端启用120Ω终端电阻
·CANopen网络:网关作为主站,通过双绞线连接12台AGV驱动器(节点ID1-12),总线长度控制在40米内
·电气隔离:在网关CAN接口端增加600V隔离模块,防止地环路干扰
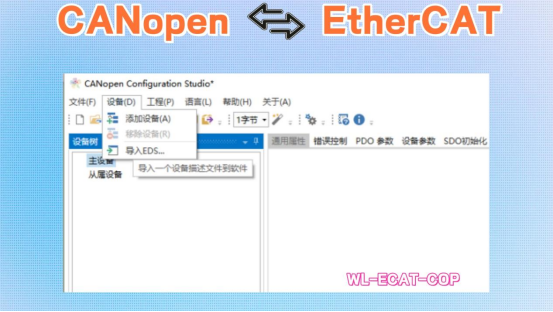
2.EtherCAT转CANopen参数配置
(1)网关基础设置
·EtherCAT侧:
o在TwinCAT3中导入JM-ECT-COP的ESI文件(VendorID:0x00000235,ProductCode:0x0001000A)
o配置从站地址为3,同步周期设为1ms
·CANopen侧:
o使用GW_Canopen_Builder工具设置波特率为1Mbps
o扫描并分配AGV驱动器节点ID(1-12)
o配置TPDO1为事件触发模式(COB-ID=0x181+NodeID)
(2)数据映射优化
·输入映射:将AGV的0x6064(实际位置)映射至EtherCAT输入区0x6000:01
·输出映射:将控制指令的0x607A(目标位置)映射至CANopenRPDO1(COB-ID=0x201+NodeID)
·动态调整:通过网关配置软件设置数据刷新周期为2ms,解决高速运动时的数据丢失问题
3.系统联调与性能验证
(1)通信测试阶段
·EtherCAT侧:使用TwinCATScope工具监测输入数据更新频率,确认达到1kHz采样率
·CANopen侧:通过CANalyzer捕获报文,验证COB-ID与数据内容一致性
·端到端延迟:从台达控制器发出指令到AGV驱动器响应,实测延迟1.8ms(含网络传输与协议转换)
(2)功能验证阶段
·路径跟踪测试:AGV按预设路径行驶时,位置误差≤0.5mm
·急停响应测试:主站发出急停指令后,AGV在10ms内完成制动
·负载测试:在满载2吨工况下,系统连续运行72小时无通信故障

四、EtherCAT转CANopen技术价值体现
1.成本优化:避免更换现有AGV设备,节省硬件升级费用约48万元
2.效率提升:系统响应时间从50ms缩短至2ms,生产节拍提高22%
3.可靠性增强:双协议冗余设计使系统可用性达到99.995%
4.扩展便利:新增AGV时仅需在网关配置软件中分配节点ID,无需改动主站程序
五、应用展望
该案例证明,捷米特JM-ECT-COP网关通过高效的EtherCAT转CANopen协议转换能力,成功解决了异构设备集成难题。随着工业4.0的推进,此类协议转换技术将在智能仓储、柔性制造等领域发挥更大价值,预计可使企业设备综合利用率提升15%-20%,为数字化转型提供关键技术支撑。
更多详细内容或具体配置过程可咨询羽工。
审核编辑 黄宇
-
plc
+关注
关注
5045文章
14447浏览量
483653 -
网关
+关注
关注
9文章
6443浏览量
55598 -
CANopen
+关注
关注
8文章
456浏览量
47595 -
ethercat
+关注
关注
19文章
1377浏览量
43460
发布评论请先 登录
EtherCAT转CANopen网关配置:汇川PLC与Autonics编码器通信最佳实践

耐达讯RS232转Ethercat网关:建筑驱动连接的“秘密武器”
耐达讯CAN转EtherCAT网关,变频器通信升级的“真香”指南
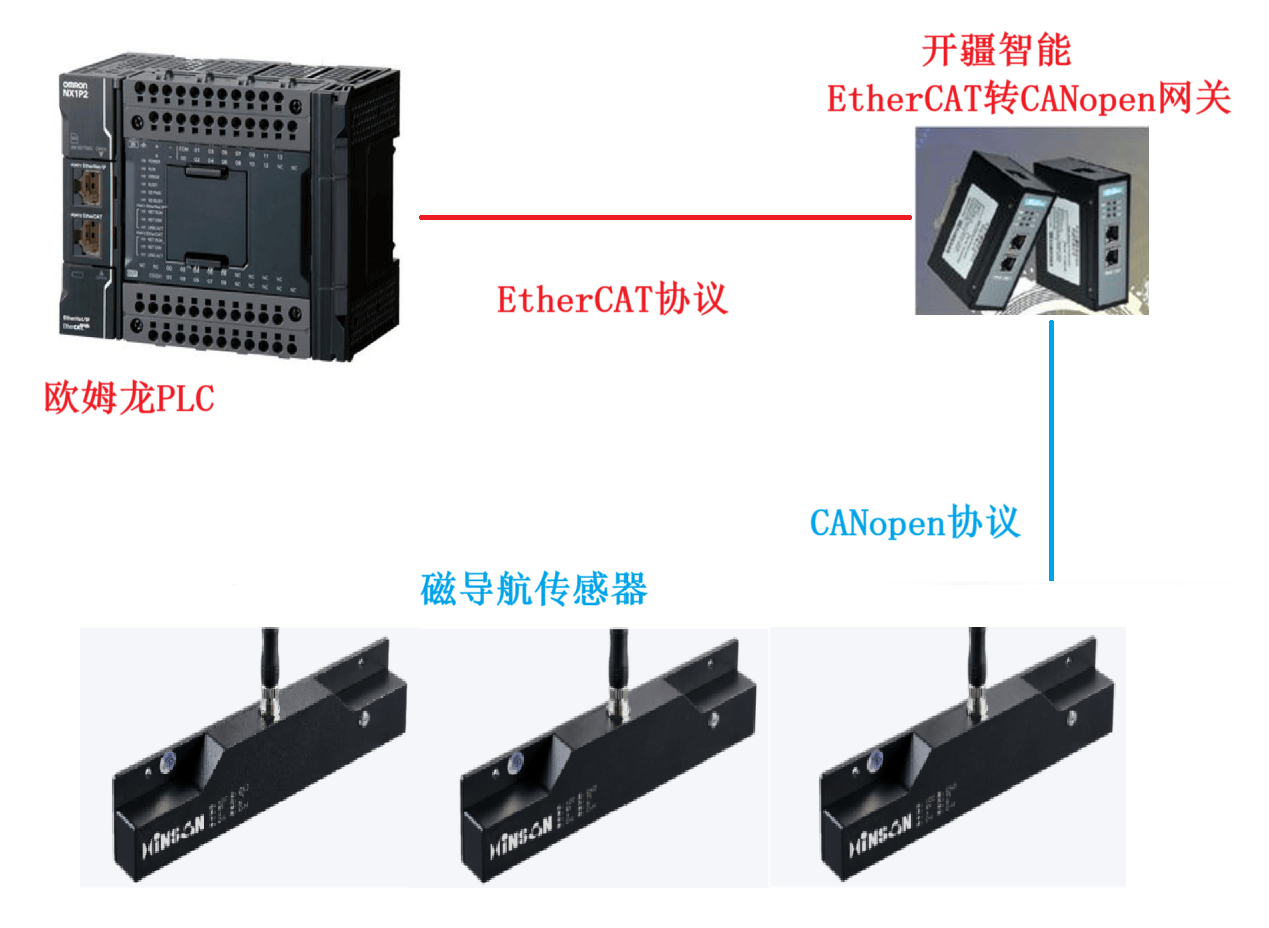
开疆智能EtherCAT转CANopen网关连接磁导航传感器配置案例
让电磁阀“听懂”EtherCAT:耐达讯CAN转EtherCAT网关
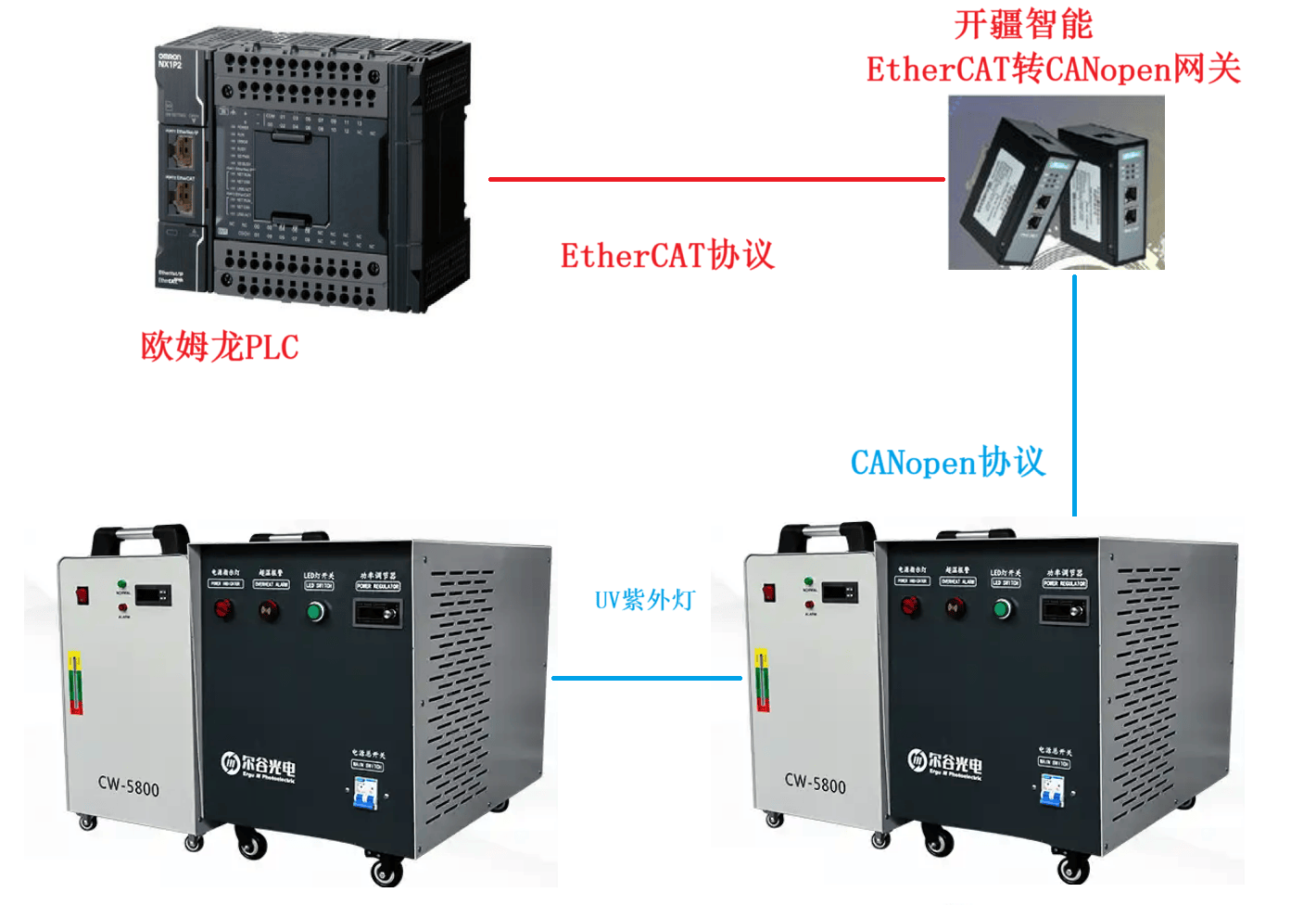
开疆智能EtherCAT转CANopen网关连接UV灯配置案例
CanOpen转EtherCAT网关与台达伺服的配置指南配置软件篇
多设备联动,canopen转Ethercat网关设备接入国产 PLC 控制系统方案落地

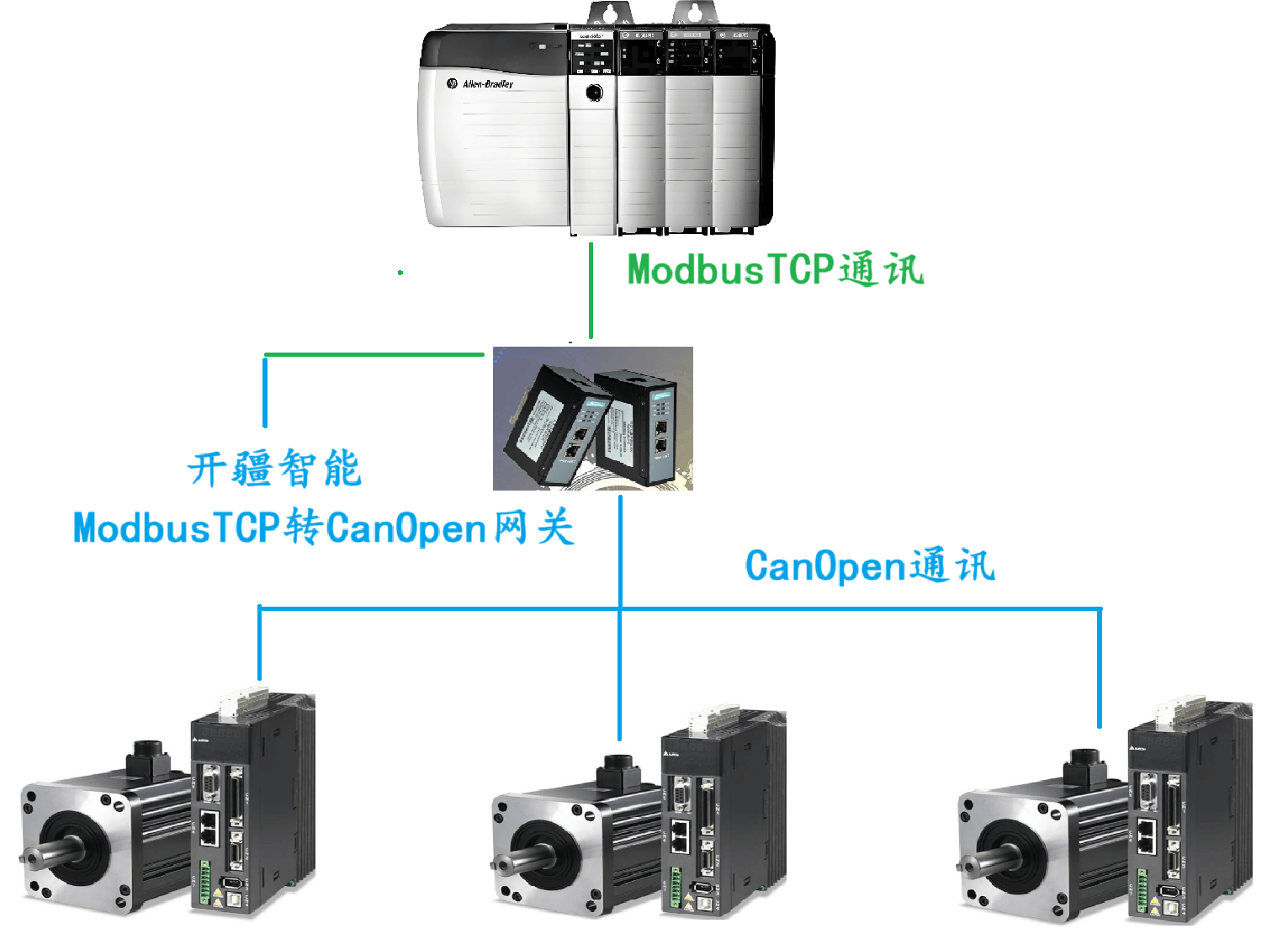
开疆智能ModbusTCP转Canopen网关连接AB PLC与台达伺服通讯案例
协议大和解:ETHERCAT转CANopen网关配置






 工商网监
工商网监
评论