 昱感微“多维像素”超级摄像头产品方案发布!
昱感微“多维像素”超级摄像头产品方案发布!

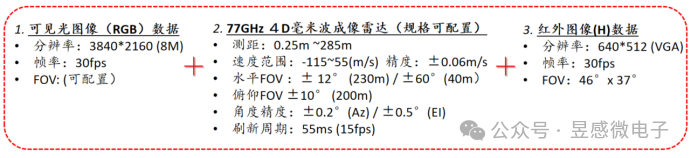
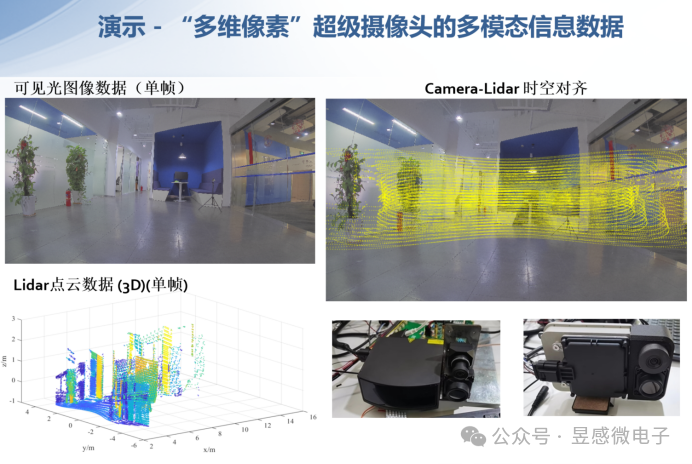
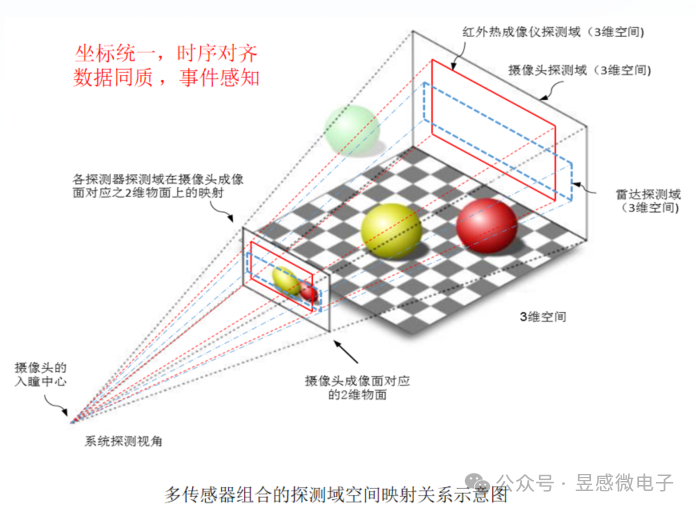
昱感微“多维像素”超级摄像头采用最前沿的多传感器器前融合技术,将可见光摄像头、红外摄像头、4D毫米波雷达/激光雷达的探测数据在前端(数据获取时)融合,并将各传感器的探测数据“坐标统一、时序对齐”,最后以“多维像素”的数据格式输出。“多维像素”是昱感微的核心技术创新之一,它是指在可见光摄像头像素信息上加上其它传感器对于同源目标感知的信息:即图像数据+雷达探测目标的距离、速度、散射截面R的感知数据+红外传感器探测的热辐射图像数据叠加组合到一起,以摄像头的像素为颗粒度组合全部感知数据,每个像素不仅有视觉信息,还包含了雷达和红外传感器的探测数据,形成多维度(多模态)测量参数矩阵数组。
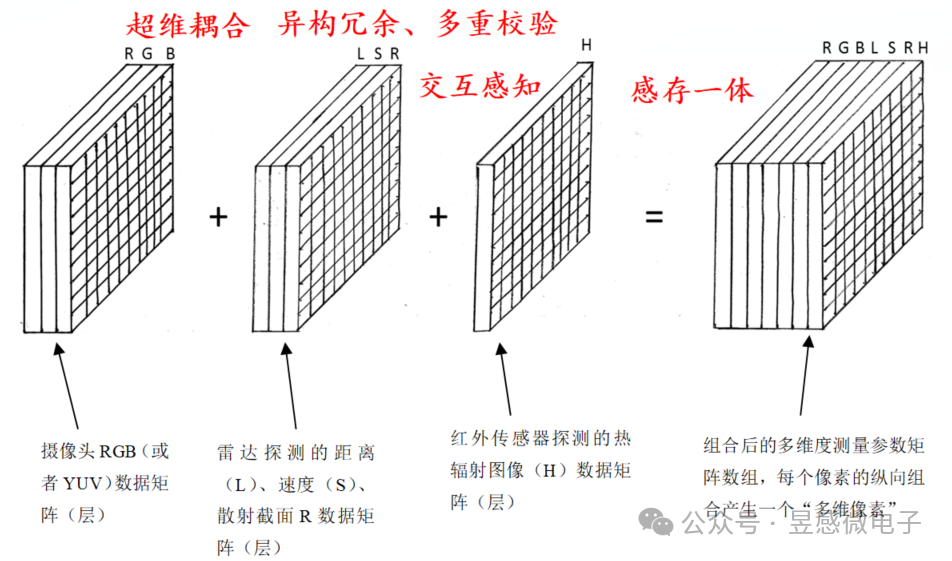
19世纪相机刚问世时照片是黑白色的,图像仅有明暗信息;后来随着彩色照片的诞生,图像不仅有明暗信息还有了色彩RGB信息;现在,昱感微的“多维像素”使图像不再局限于二维的明暗色彩信息,还有目标的3D位置/距离/速度/材质等多维度的信息,为自动驾驶和机器视觉提供提供目标与环境“多模态语义”精准信息,助力客户跨越L3/L4级自动驾驶的感知技术难关。
多维像素”超级摄像头产品方案A
(摄像头+毫米波雷达组合)

整机规格:
尺寸:175mm X 100mm X 60mm
功耗:26W(峰值功率)
供电要求:12V 3A
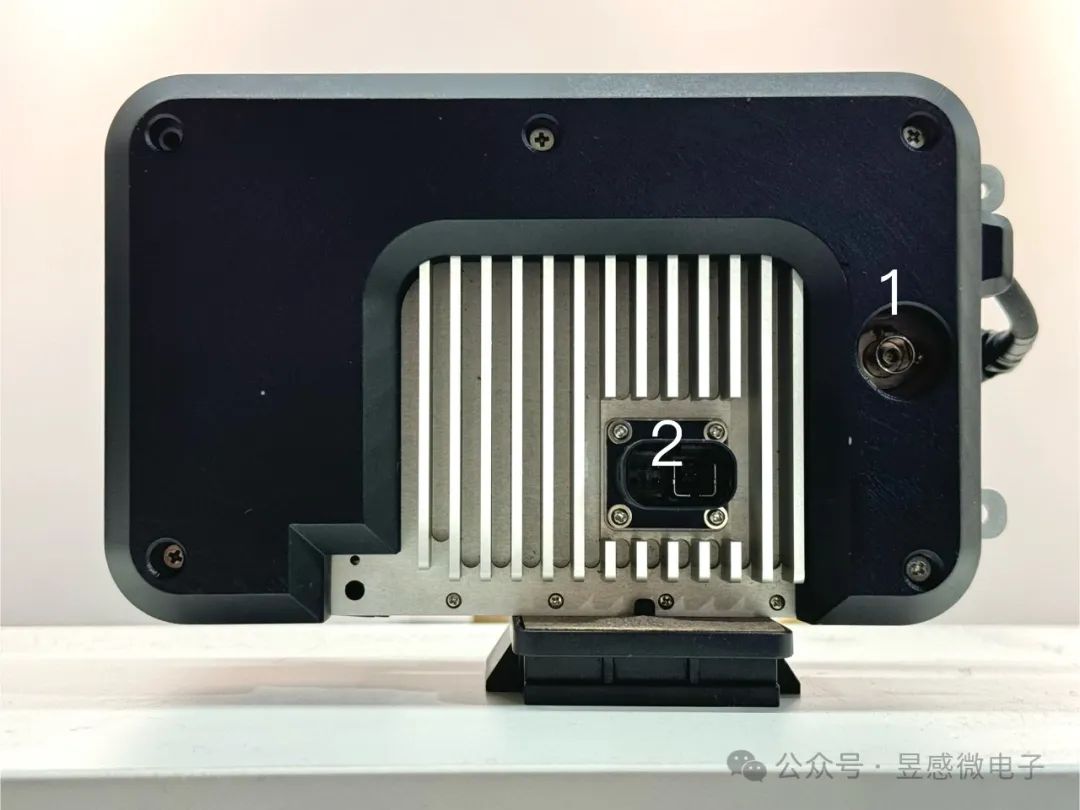
输出接口规范:
1:标准fakra接口,支持GMSL2协议
2:TE接口
“多维像素”超级摄像头产品方案B(摄像头+激光雷达组合)

整机规格:
尺寸:300mm X 225mm X 64mm
功耗:34W(峰值功率)
供电要求:12V 3A

输出接口规范:
1:标准fakra接口,支持GMSL2协议
2:TE接口

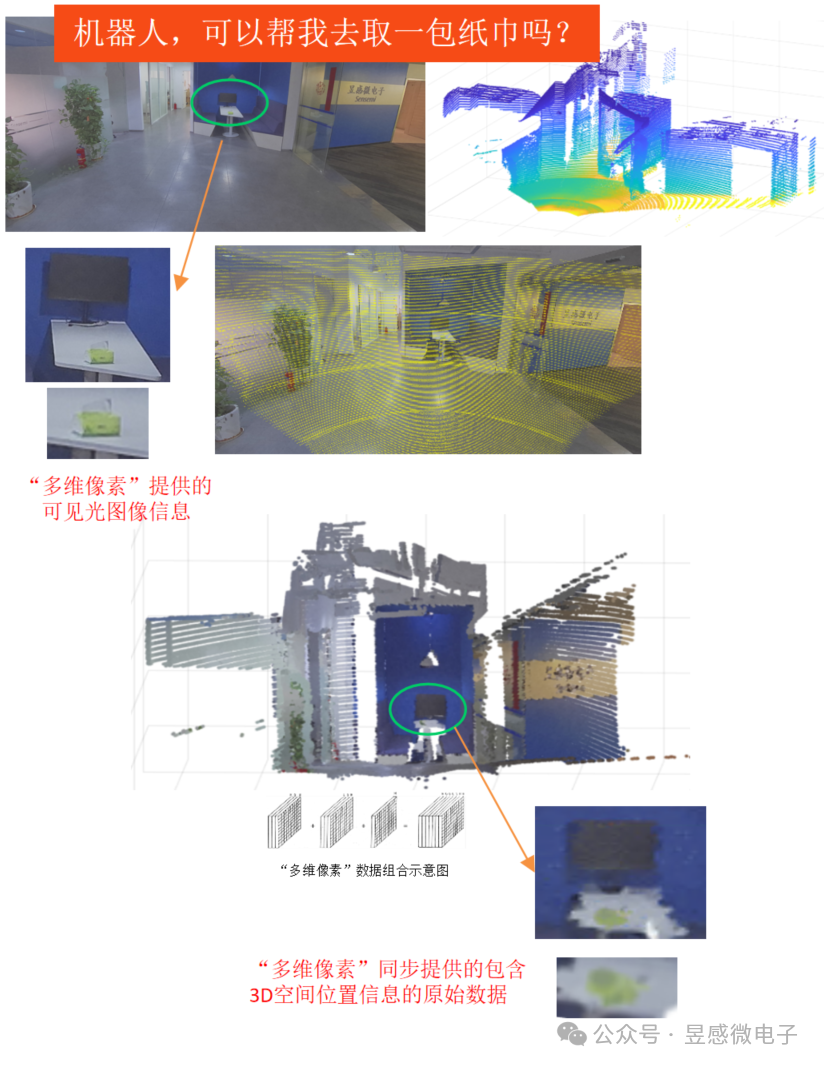
“摄像头 + 激光雷达”组合输出的“多维像素”图像“多模态多维感知”的单帧”多维像素”原始数据 - 3D空间效果展示
值得注意的是,上方视频是没做任何数据插值处理的单帧原始数据的多模态信息输出效果,已经完整地可以展示出周围环境和目标,并且包含了环境里的所有细节。例如在桌面上的纸巾,通过“多维像素”提供的可见光信息和3D空间位置信息的原始数据,机器视觉可以精准地识别和定位到纸巾的位置。“多维像素”提供的多模态语义信息之丰富可以为任何需要智能感知的客户提供其所需要的感知信息。
目前,昱感微正与某智能汽车平台客户合作数据采集车项目。我们在采集车的车顶上安装了昱感微“超级摄像头”,将道路上的各种状况转化为目标与环境“多模态语义”精准信息,助力中国车企累积数据优势,实现弯道超车。

-
传感器
+关注
关注
2574文章
54413浏览量
786250 -
摄像头
+关注
关注
61文章
5059浏览量
102461 -
激光雷达
+关注
关注
978文章
4380浏览量
195407
发布评论请先 登录
自动驾驶既然有双目摄像头了,为什么还要三目摄像头?

车载双目摄像头如何“看见”世界?


红外摄像头模组是什么?科技时代的眼睛

【EASY EAI Orin Nano开发板试用体验】--USB摄像头使用
AKOOL发布全球首款实时摄像头
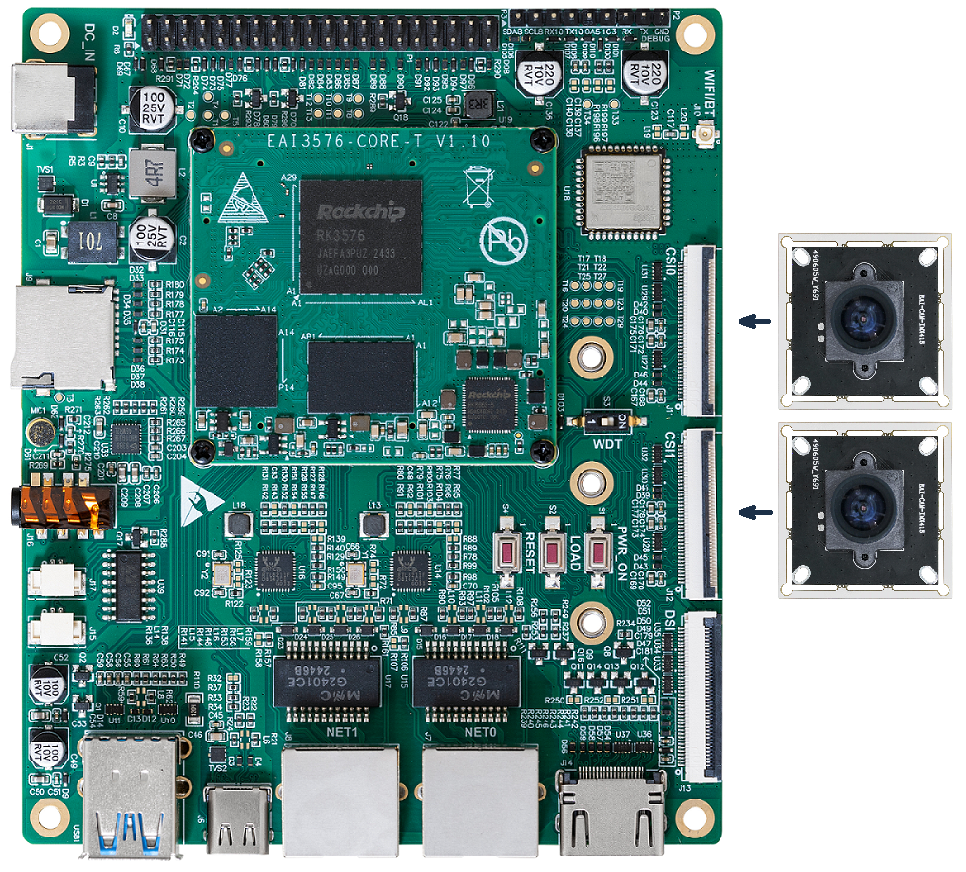
基于RK3576开发板的网络摄像头方案


社区安装IPC摄像头,跟安装一般安防监控摄像头有什么区别?

兆易创新网络摄像头解决方案

米尔瑞芯微RK3576实测轻松搞定三屏八摄像头
昱感微创始人&CEO蒋宏受邀出席“聚焦多模态雷视融合感知技术”学术沙龙,共探AI机器视觉未来
超越人类视觉!昱感微“多维像素”多模态超级摄像头方案产品赋能超凡感知力






 工商网监
工商网监
评论