 当前制约机器人市场化进程的主要因素
当前制约机器人市场化进程的主要因素

机器人无疑是现在乃至今后长期大家都看好的常青藤朝阳产业。自2016年人机大战结果所引爆的人工智能机器人发展势头一直都比之前来的更加强劲快猛。包括3年多的全球疫情丝毫未减甚至赋能到全球疫情防控方面所取得显著效果更加激发并坚定了人们对人工智能机器人的信心。尽管目前在市场实际推进过程中还咯显不足低于预期。究其原因其主要点都是完全可以解决的。毕竟机器人是产品不是艺术品,主要是用来为人类服务的,而不是拿来鉴赏的。因此还必须挖掘尽快把制约机器人市场化进程主要原因找出来,并很好的解决。
1 目前已有的机器人有相当部分其主要功能与实际使用场景是脱节的,不是基于市场所需要的主要功能来开发,而是开发者自己对市场场景的脆片化的理解,不能解决市场实际场景中需要解决的主要问题;也就是说不能在市场发挥应有的使用价值。得不到市场的认可。
2 决策者对人工智能机器人产品思维模式出现偏差。从事机器人产业领域的有不少决策者主要是基于传统产品思维模式来理解分析认知机器人产品。这些决策者只是停留在机器人认知的表层。简单的认为:机器人产品经过2-3左右的开发;然后就可以通过资金低价等方式批量进入庞大的市场。没有意识到机器人产品目前的技术仅仅是从实验室到市场结合验证改进完善的阶段,而且是多种技术需要高度融合才会有较好的场景效果,要达到这个市场能够认可的效果还必须循序渐进的远远不止3年内就能解决的。所以机器人开发出来经过市场验证中才慢慢明白。但为时已晚。如果不及时加以调整而继续强力推进市场,只能越走越错,逐渐陷入亏损的泥潭之中。
3 试错勇气不够。由于机器人目前仍出于实验室到市场应用逐步完善改进的艰难期。没有批量市场来支撑目前人工智能机器人现有技术所能支撑的功能价值。而且投入相对较大。市场变现还不是很明朗等。所以越来越多的决策人避重就轻尝试性的推进等。自然市场回馈的效果必然就不理想。这方面我们确实不如美国日本等开发者。他们是通过实际出来的样品逐渐改进完善,即使不成功也会勇敢面对;而我们国家很多人却是用一个近乎完美甚至很难短期能实现的的动画效果来展示自己的开发思路,以此吸引大家的眼球。而不去直接开始有创意但有缺陷的样品开发中。
深圳市江智工业技术有限公司
江智(福建)智能科技有限公司
江智(广州)智能装备科技有限公司
2023年10月21日
-
机器人
+关注
关注
214文章
31691浏览量
224639 -
人工智能
+关注
关注
1821文章
50547浏览量
267933 -
机器
+关注
关注
0文章
801浏览量
41977
发布评论请先 登录
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
禾赛科技全面领跑机器人激光雷达市场
基于兆易创新GD32H75EYMJ7 MCU的机器人GaN关节驱动解决方案

机器人热管理技术体系与方案

工业机器人TOP1,切入人形机器人赛道,意欲何为?

德州仪器人形机器人技术线上研讨会精彩回顾
时识科技类脑视触觉方案破解机器人灵巧操作难题
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
ADI借助NVIDIA Jetson Thor平台加速人形机器人研发进程
影响电解电容寿命的主要因素及其详细分析
工业机器人的特点
A股机器人概念崛起:科义巡检机器人与视频行为分析系统共推智能化发展

人形机器人控制器卡脖子难题怎么破?——基于 NVIDIA Jetson AGX Orin与X86的小型化、高可靠解决方案

第10万台机器人下线,普渡机器人领航全球服务机器人规模化量产

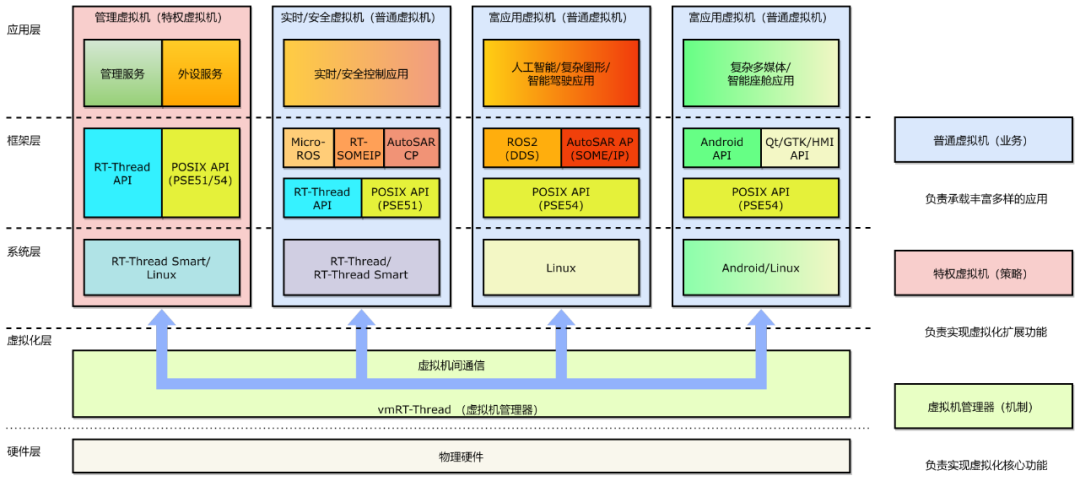
通过vmRT-Thread和ROS2赋能机器人智能开发



评论