 AI提高自动驾驶夜视能力,检测黑夜、雾天场景和白天一样
AI提高自动驾驶夜视能力,检测黑夜、雾天场景和白天一样

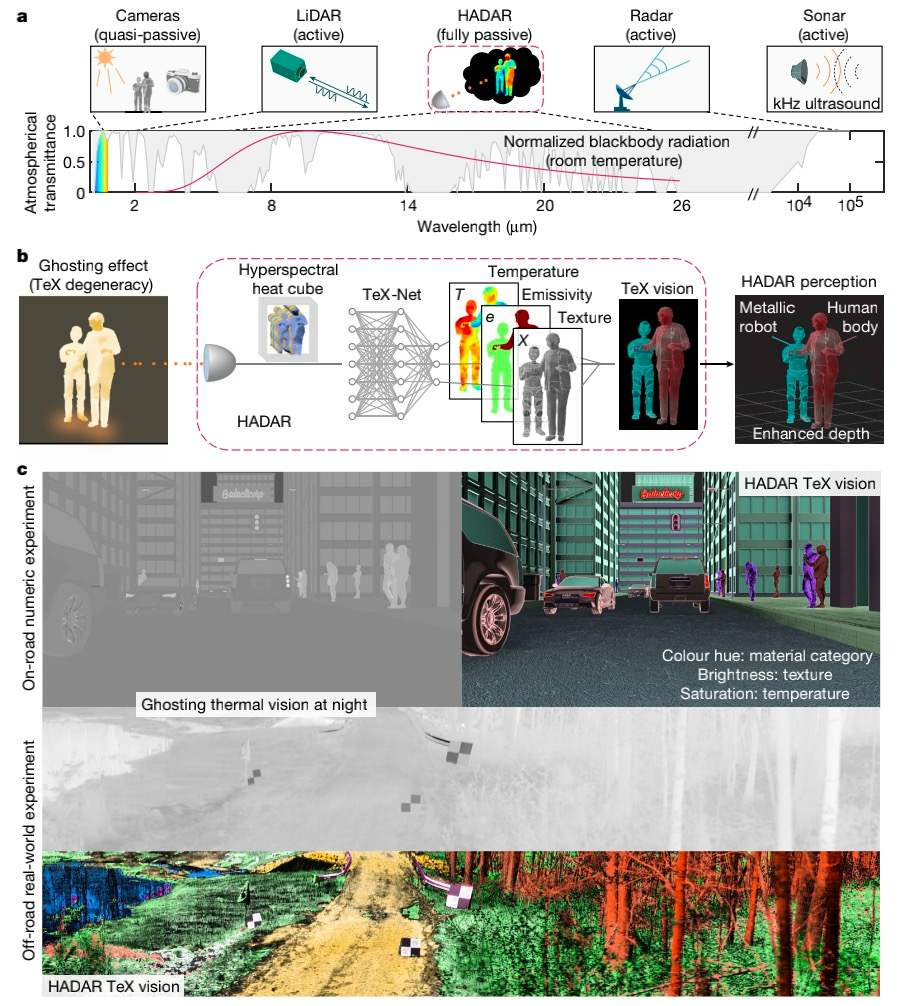
环境感知是自动驾驶领域非常重要的一项任务。特别是在夜晚或者极端天气的情况下,现有的视觉感知和激光雷达两种方式对环境的感知和识别都效果不佳。这给自动驾驶等高风险应用带来了挑战。 有些研究提出使用热像仪来弥补 LiDAR 和视觉摄像头的缺陷。但由于物体不断发出热辐射,粒子会扩散到附近的环境中,导致热成像变得模糊、无纹理,形成「鬼影(ghost)」,使这种方法难以实际应用。 现在,一种新的热成像技术可以不受雾、烟和黑暗等视觉障碍的影响,使得自动驾驶汽车在黑暗中也能准确感知环境。如下图所示,与以前的热成像(上)相比,新方法可以创建更清晰、更有质感的夜间图像(中和下)。
这种新方法是由来自普渡大学等机构的研究者提出,他们开发了一种新的系统, 称为「热辅助探测和测距系统(HADAR)」。借助该系统,我们可以在环境不佳的情况下获得精细的环境图像,细节与精度和传统相机在明亮日光下拍摄的图像相当。研究论文已登上 Nature 封面。
论文地址:https://www.nature.com/articles/s41586-023-06174-6 方法介绍 HADAR 能够穿透光学杂波来检测物体的温度、材料成分和热辐射模式,而不受雾、烟和黑暗等视觉障碍的影响。因此,无论一天中的时间或环境如何,HADAR 基于对深度和纹理的渲染都能创建极其详细、清晰的图像。
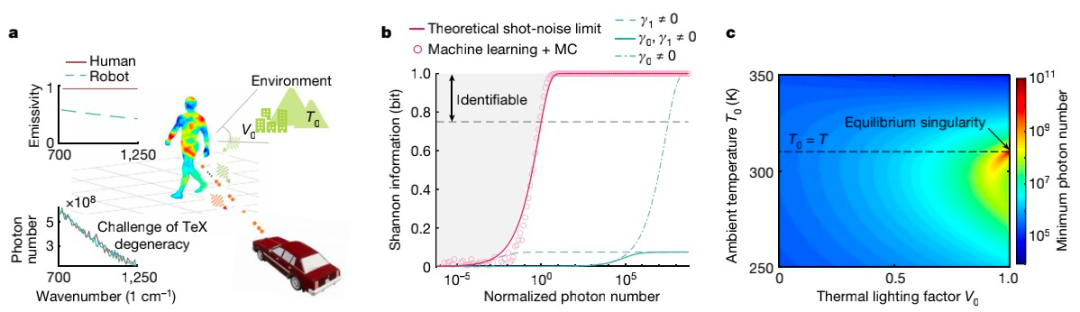
HADAR 与「鬼影」热成像。 为了训练 HADAR 系统,研究人员在夜间使用先进的热成像相机和能够显示电磁波谱中能量辐射的成像传感器,在户外捕获数据。他们还创建了对户外环境的计算机模拟,以便进行额外的 AI 训练。 普渡大学电气与计算机工程系教授、本文作者之一 Zubin Jacob 表示,「HADAR 学会了探测物体并估计与这些物体的距离,其精度是仅依靠传统夜视技术的 10 倍。而且,HADAR 在夜间的性能与传统物体检测系统在白天的性能相当。」 「声纳、雷达和激光雷达等会发出信号并返回反射,以推断物体是否存在及其与物体的距离。除了相机所拥有的视觉能力之外,它们还提供了场景的额外信息,尤其是在环境照明较差的情况下,」Jacob 表示,「然而,HADAR 有着根本的不同,它利用不可见的红外辐射来重建夜间场景,清晰度就像白天一样。」 在没有反射光的黑暗环境中, 传统摄像头无法很好地捕捉图像,雷达和激光雷达也容易受到干扰。 热成像技术通过捕获环境中物体辐射的红外光来重建场景。如下图所示,新研究提出的 HADAR 方法改变了机器感知的方式:
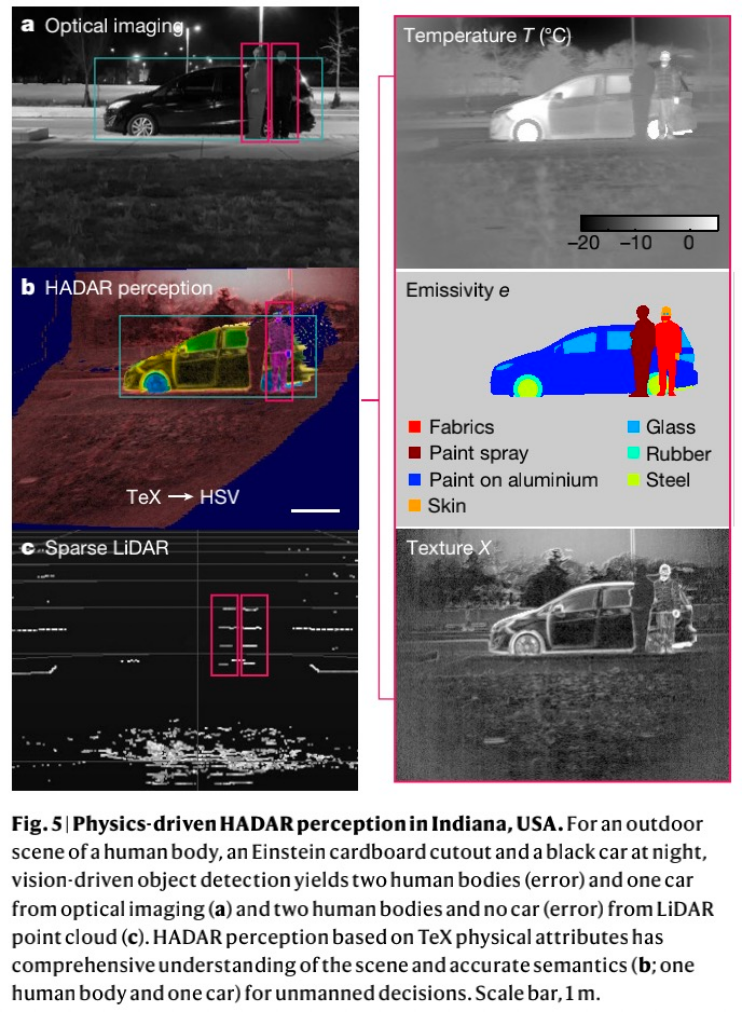
 下图展示了一个 HADAR 的应用实例。其中有一位真人和一个人形纸板。RGB 光学成像和稀疏 LiDAR 点云都无法区分真人和人形纸板,并且 LiDAR 还难以检测到夜间条件下的车辆。而 HADAR 检测到相应材料区域(皮肤 + 织物)中的人,将其与纸板清楚地区分开来,克服了「幻象制动」问题。
下图展示了一个 HADAR 的应用实例。其中有一位真人和一个人形纸板。RGB 光学成像和稀疏 LiDAR 点云都无法区分真人和人形纸板,并且 LiDAR 还难以检测到夜间条件下的车辆。而 HADAR 检测到相应材料区域(皮肤 + 织物)中的人,将其与纸板清楚地区分开来,克服了「幻象制动」问题。
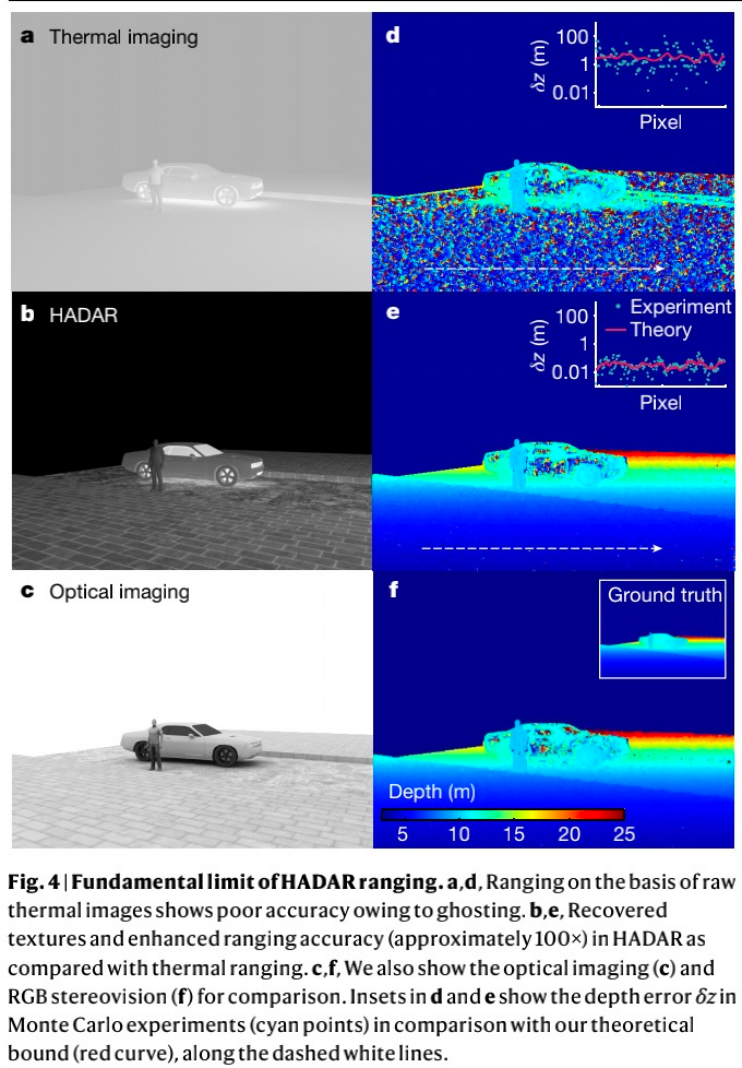
 下图 6 展示了 HADAR 测距在夜间击败了最先进的热测距技术:
下图 6 展示了 HADAR 测距在夜间击败了最先进的热测距技术:
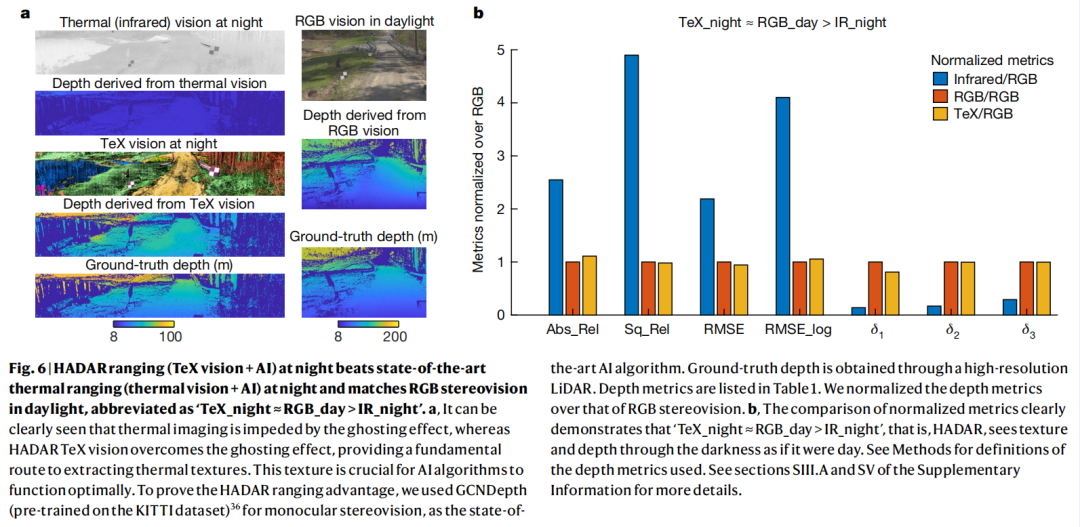 由于该方法能够确定场景中的物体是由什么组成的,因此与传统成像技术相结合,即使在白天,HADAR 也可以提供有关场景的独特信息。
由于该方法能够确定场景中的物体是由什么组成的,因此与传统成像技术相结合,即使在白天,HADAR 也可以提供有关场景的独特信息。
原文标题:AI提高自动驾驶夜视能力,检测黑夜、雾天场景和白天一样
文章出处:【微信公众号:智能感知与物联网技术研究所】欢迎添加关注!文章转载请注明出处。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
物联网
+关注
关注
2950文章
48132浏览量
418564
原文标题:AI提高自动驾驶夜视能力,检测黑夜、雾天场景和白天一样
文章出处:【微信号:tyutcsplab,微信公众号:智能感知与物联网技术研究所】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
怎么将自动驾驶场景理解能力从二维提升到三维?
[首发于智驾最前沿微信公众号]自动驾驶的核心任务就是赋予机器像人类一样观察、思考并操作车辆的能力。在整个技术架构中,感知与场景理解处于最前端,是后续所有决策与执行逻辑的根基。 如果将

纯视觉自动驾驶如何在夜晚感知场景?
[首发于智驾最前沿微信公众号]在聊今天的话题前,先申明下,对于纯视觉自动驾驶来说,夜晚确实是一个极具挑战的场景,今天仅从技术实现上来讨论纯视觉自动驾驶在夜间感知

自动驾驶中常提的占用网络检测存在哪些问题?
自动驾驶感知技术在过去几年中经历了很大的变化,从最初的二维图像检测到鸟瞰图投影,再到如今备受关注的占用网络,感知技术的提升,让自动驾驶的能力越来越强。
自动驾驶端到端为什么会出现黑盒现象?
在自动驾驶领域,端到端(End-to-End)是指从感知环境的原始数据到车辆实际控制指令,全部交给一个统一的深度学习模型来完成。这和传统的模块化自动驾驶系统不

自动驾驶场景生成方法及优选方案:康谋aiSim 3DGS方案重塑行业标准
生成技术应运而生,其中 康谋aiSim 3DGS方案 凭借技术突破与工程化落地能力,成为自动驾驶场景生成领域的优选方案。 一、自动驾驶
Transformer如何让自动驾驶大模型获得思考能力?
在谈及自动驾驶时,Transformer一直是非常关键的技术,为何Transformer在自动驾驶行业一直被提及?
L3级自动驾驶在技术上有什么不一样的要求?
[首发于智驾最前沿微信公众号]最近,很多小伙伴在后台私信,想了解L3级自动驾驶有哪些技术要求。其实对于自动驾驶行业来说,L3级是一个非常重要的分水岭。一旦达到L3级,车辆的主要

自动驾驶汽车如何检测石头这样的小障碍物?
[首发于智驾最前沿微信公众号]最近有一位小伙伴留言,想让我聊聊自动驾驶汽车对于石头这样的小障碍物,是使用什么视觉任务检测的。在直接回答“如何检测”之前,其实要思考

纯视觉自动驾驶会像人眼一样“近视”吗?
感知能力,使其在自动驾驶感知系统中的应用场景不断扩展。 正因如此,很多人习惯将纯视觉自动驾驶类比为“人眼驾驶”。但从生物视觉的角度来看,人眼

讲讲如何闭环自动驾驶仿真场景,从重建到可用?
静态3D场景无法满足仿真测试?缺乏动态交通流、难以模拟极端天气、传感器模型不逼真!本文带您看aiSim场景编辑与GGSR渲染器如何破局!自由配置暴雨黑夜与虚拟车流,使用通用高斯泼溅实现广角无畸变的高保真渲染,为

生成式 AI 重塑自动驾驶仿真:4D 场景生成技术的突破与实践
生成式AI驱动的4D场景技术正解决传统方法效率低、覆盖不足等痛点,如何通过NeRF、3D高斯泼溅等技术实现高保真动态建模?高效生成极端天气等长尾场景?本文为您系统梳理AI驱动的4D

卡车、矿车的自动驾驶和乘用车的自动驾驶在技术要求上有何不同?
,自动驾驶技术也得到了充足的应用,但因应用场景不同,技术的侧重方向也有所区别。今天就来和大家聊一聊这个话题。 应用场景:开放道路vs封闭场地 首先要理解的是,

自动驾驶安全基石:ODD
和限制下可以正常工作,是自动驾驶安全的核心概念之一。 对于人类司机来说,在不同的道路上驾驶的能力也有所区别,比如新手司机在一些窄路、山路
新能源车软件单元测试深度解析:自动驾驶系统视角
。
自动驾驶软件的特殊性
感知层: 激光雷达、摄像头等传感器数据处理算法的单元测试需覆盖极端场景。例如,激光雷达点云滤波算法在雨雪天气下的噪声抑制能力需通过边界测试验证。某厂商曾在测试中遗漏
发表于 05-12 15:59
AI将如何改变自动驾驶?
[首发于智驾最前沿微信公众号]五一假期继续闲聊一下,还欢迎大家随意留言,随着人工智能(AI)的发展,很多车企及自动驾驶供应商正尝试将AI融入自动驾驶



评论