 2025年的自动驾驶技术有哪些升级?
2025年的自动驾驶技术有哪些升级?

[首发于智驾最前沿微信公众号]随着智能网联汽车产业的持续推进,高阶智能辅助驾驶正迎来全新的技术拐点。从2023年至2025年,行业已基本完成从高速NOA到城市NOA的演进,具备典型场景高阶智能辅助驾驶能力的车型不断量产落地,自动驾驶的可运营场景逐步从限定区域扩展至泛化场景,且真正朝着全场景D2D(Door-to-Door)迈进。

图自动驾驶发展路径,源自:亿欧智库
在此过程中,ODD(Operational Design Domain,运行设计域)的拓展成为关键一环,从最初的高速封闭路段逐步拓展至城市道路、泊车场景及低速园区等复杂环境,实现对高精度地图、高通量计算、高可靠传感等关键环节的协同突破。通过多传感器融合、感知能力提升以及算法结构优化,整车实现了从路径规划到行为决策的连续性升级。中国市场在硬件端不断下探成本的同时,通过软件架构模块化重构与OTA频繁迭代,持续推动普惠型智能驾驶普及,开启了10万元级别车型搭载高阶辅助驾驶功能的新时代。
在系统架构层面,当前主流方案普遍采用“云端-边缘-车端”三级算力传导路径,通过不同层级算力的协同,实现数据处理与模型训练的高效闭环。云端主要承担模型大规模训练与仿真测试功能,是算法进化的核心算力中心。以特斯拉为例,其自研的Dojo超算平台可达到88.5 EFLOPS,为其端到端算法提供了强大训练支持。在国内,百度、华为等企业也加快了EFLOPS级别超算中心的建设步伐,通过数据集聚与仿真迭代提升系统泛化能力。车端算力平台则聚焦于推理任务与实时响应,当前主流芯片如英伟达Orin(254 TOPS)、地平线征程5(128 TOPS)、华为MDC 810(400+TOPS)等正快速完成从百TOPS向千TOPS的跃迁。边缘端作为数据的中间处理层,有效缓解车端计算压力,并通过高频OTA形成模型迭代的实时反馈通道。整体来看,算力架构正呈现出由中心化训练向分布式部署过渡的趋势,为高频场景适应与规模化落地提供保障。

图自动驾驶系统架构演进,源自:亿欧智库
数据体系是高阶智能辅助驾驶闭环能力的基础。系统从早期“硬件感知冗余”逐步演进至“数据驱动闭环”阶段,通过提升数据质量与构建高效反馈机制,实现从采集、标注、训练到部署的全流程协同。长尾场景已成为当前智能辅助驾驶算法能力提升的瓶颈,依靠大模型对复杂场景实现泛化能力的前提是海量、高质量的训练数据。当前主流路径是通过事件触发机制采集长尾数据并上传至云端,结合闭环标注平台自动完成数据清洗与样本优化,并基于MLOps平台实现多模型迭代与蒸馏部署。多模态传感器融合也已成为提升感知覆盖率与鲁棒性的主流方案。典型高阶系统多搭载8V5R1L或11V5R3L组合(即8个或11个摄像头、5个毫米波雷达、1个或3个激光雷达),在硬件层面实现高冗余感知能力。与此同时,纯视觉方案也在成本敏感市场快速推广,依托Transformer结构与大模型训练手段提升语义理解与时空推理能力,降低了激光雷达与高精地图的依赖。
定位能力的提升亦是高阶智能辅助驾驶向城市复杂场景渗透的前提。在系统设计中,已从传统GNSS单点定位发展为基于GNSS+IMU+视觉SLAM+激光雷达融合的高精度定位方案,并通过多模态数据的实时融合实现复杂环境下的鲁棒识别。泛在定位架构成为趋势,即基于车端感知、自主建图、V2X等能力构建可脱离高精地图的实时定位网络。针对城市环境中隧道、高架、地下车库等信号弱区,通过构建高置信度先验模型与局部环境重定位算法,系统能够在无外部信号支持下完成连续路径估计与精度恢复,保障城市NOA的可靠运行。

算法结构也在经历深刻的范式转换。过去以“感知—预测—规控”串行结构为主的模块化算法,逐步向端到端(E2E)架构转变。在特斯拉引领下,端到端算法架构已完成从多阶段输出到矢量空间表达、从规则驱动到大模型感知的多轮升级。当前,国内主流厂商如小鹏、百度Apollo、蔚来等也在推动E2E技术演进。具体路径就是模块化结构向“感知-决策-控制”一体化架构升级,通过Transformer+BEV感知空间构建类人驾驶路径表征模型,实现更高的行为合理性与路径可解释性。此外,车端算法正加速向VLA(Vision-Language-Action)结构演进,通过引入语言模型与决策图谱,使车辆具备复杂语义理解与任务分解能力,开启从“能动控制”向“认知智能”跃迁的技术路径。
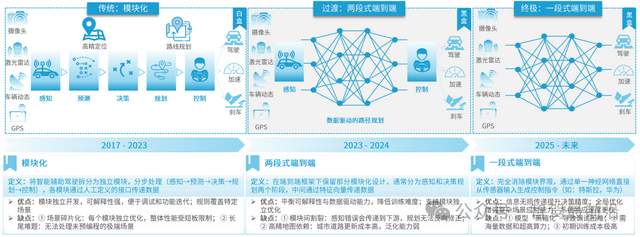
图自动驾驶算法结构演进,源自:亿欧智库
为了突破数据成本与长尾场景的训练瓶颈,“世界模型”在云端训练中逐渐成为主流。世界模型通过构建可交互的虚拟环境,将真实世界映射为高精度仿真平台,使得算法能够在虚拟环境中进行大规模试错与策略学习,从而大幅降低真实数据采集成本与训练风险。训练完成后的模型经由轻量化蒸馏部署至车端,兼顾模型精度与算力约束,构成“云端大模型+车端小模型”的混合智能协作架构。这一结构有效缓解了算力瓶颈问题,并提升系统对未见场景的泛化能力,是推动高阶智能辅助驾驶从“感知控制”向“意图理解”演化的重要技术方向。
从产业形态来看,当前智能辅助驾驶方案呈现三类发展路径,即软硬全栈自研、自研+外采、软硬全外采。全栈自研企业如华为、百度通过芯片、算法、工具链与平台等一体化布局构建闭环体系,实现从数据采集到模型部署的全流程掌控,具备强大的定制化能力与快速迭代机制;自研+外采则通过掌握算法核心并结合第三方芯片与传感器构建柔性架构,实现研发成本与量产落地的双平衡;而第三方软硬外采方案则以轻量化、标准化为主,快速适配整车厂需求,推动中低端车型智能化普及。总体来看,方案模式与整车厂技术战略深度绑定,形成多样化发展生态。
未来,随着政策支持日趋明朗、量产路径日益清晰,以及多家主机厂发布L3及以上级别自动驾驶车型的量产规划,高阶智能辅助驾驶正在加速迈向真正的商业化阶段。自动驾驶系统的竞争焦点将进一步聚焦于算法泛化能力、系统鲁棒性、模型轻量化与数据闭环效率等核心指标。伴随车规级大算力芯片、泛在高精度定位网络以及端云协同算法体系的全面升级,自动驾驶正在从技术试验走向规模部署,成为未来汽车智能化转型的关键支点。
-
自动驾驶
+关注
关注
795文章
15011浏览量
181715 -
自动驾驶技术
+关注
关注
4文章
98浏览量
15623
发布评论请先 登录
如何构建适合自动驾驶的世界模型?

纯视觉自动驾驶的优势和劣势有哪些?

迈向自动驾驶:地平线技术生态大会探索自动驾驶规模化商用路径

不同等级的自动驾驶技术要求上有何不同?
自动驾驶仿真测试有什么具体要求?

端到端自动驾驶相较传统自动驾驶到底有何提升?

塑造自动驾驶汽车格局的核心技术
低速自动驾驶与乘用车自动驾驶在技术要求上有何不同?

Nullmax端到端自动驾驶最新研究成果入选ICCV 2025

卡车、矿车的自动驾驶和乘用车的自动驾驶在技术要求上有何不同?

自动驾驶技术测试有哪些?

自动驾驶技术落地前为什么要先测试?
导远科技亮相2025欧洲高级辅助与自动驾驶技术博览会
新能源车软件单元测试深度解析:自动驾驶系统视角




评论