 【NPU实战】在迅为RK3588上玩转YOLOv8:目标检测与语义分割一站式部署指南
【NPU实战】在迅为RK3588上玩转YOLOv8:目标检测与语义分割一站式部署指南

想要在嵌入式边缘设备上实现实时的AI视觉分析?面对复杂的模型转换和部署是否感到无从下手?本文将手把手带你完成YOLOv8目标检测与语义分割模型在迅为RK3588开发板上的无缝部署与推理实战。依托迅为RK3588内置的强大NPU,我们无需深入底层代码,即可快速验证AI模型性能,为智能监控、机器人、工业质检等应用开发铺平道路。
- 开发平台简介:为什么选择迅为RK3588?
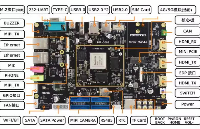
工欲善其事,必先利其器。本次实战的核心硬件平台——迅为iTOP-RK3588开发板,是一款面向高端AIoT应用的核心板。
·强大算力核“芯”:搭载瑞芯微RK3588旗舰级八核处理器,集成了6TOPs算力的NPU(神经网络处理单元),专为加速AI推理任务而生,能够高效处理YOLOv8这类复杂的视觉模型。
·全流程开发支持:迅为提供了从硬件驱动、系统构建到AI部署的完整资料包。本文使用的例程便来自于其丰富的NPU例程测试配套资料,开箱即用,极大降低了开发门槛。
·丰富生态与拓展性:板载丰富的接口(如MIPI-CSI、HDMI、以太网等)和强大的多媒体处理能力,使其不仅能跑通模型,更能轻松集成到真实的视频流采集、分析和显示系统中,完成从原型到产品的快速过渡。

二、实战一:YOLOv8目标检测模型部署
目标检测是计算机视觉的基石任务,用于识别图像中的物体并定位其位置。下面我们开始在RK3588上运行YOLOv8检测模型。
- yolov8目标检测
编译好的yolov8例程已经放在了“iTOP-3588开发板\02_【iTOP-RK3588开发板】开发资
料\15_NPU例程测试配套资料\08_rknn_model_zoo测试\16_ yolov8”目录下,如下图所示:

将该文件拷贝到开发板上,并解压,解压完成如下图所示:

然后进入该文件夹,使用以下命令运行可执行文件,实现图片的位置和种类识别,如下图
所示:
export LD_LIBRARY_PATH=./lib
./rknn_yolov8_demo model/yolov8.rknn model/bus.jpg

最后会在当前目录下生成推理完成的图片,如下图所示:


可以看到不同的人以及公交车就被识别了出来,证明模型推理成功。
2.yolov8_seg语义分割
编译好的yolov8_seg例程已经放在了“iTOP-3588开发板\02_【iTOP-RK3588开发板】开发
资料\15_NPU例程测试配套资料\08_rknn_model_zoo测试\17_yolov8_seg”目录下,如下图所
示:

将该文件拷贝到开发板上,并解压,解压完成如下图所示:

然后进入该文件夹,使用以下命令运行可执行文件,实现图片的位置和种类识别,如下图
所示:
export LD_LIBRARY_PATH=./lib
./rknn_yolov8_seg_demo model/yolov8-seg.rknn model/bus.jpg

最后会在当前目录下生成推理完成的图片,如下图所示:


可以看到不同的人以及公交车就被分割了出来,证明模型推理成功。
-
目标检测
+关注
关注
0文章
234浏览量
16538 -
RK3588
+关注
关注
8文章
585浏览量
7540
发布评论请先 登录
基于RK3588的NPU案例分享!6T是真的强!
基于迅为RK3588【RKNPU2项目实战1】:YOLOV5实时目标分类
RK3588 技术分享 | 在Android系统中使用NPU实现Yolov5分类检测
RK3588 技术分享 | 在Android系统中使用NPU实现Yolov5分类检测
让NPU跑起来iTOP_RK3588开发板在Linux系统中使用NPU
迅为RK3588开发板修改编译工具路径
在AI爱克斯开发板上用OpenVINO™加速YOLOv8目标检测模型

RK3588 技术分享 | 在Android系统中使用NPU实现Yolov5分类检测-迅为电子


基于迅为RK3588开发板实现高性能机器狗主控解决方案- AI能力实战:YOLOv5目标检测例程



评论