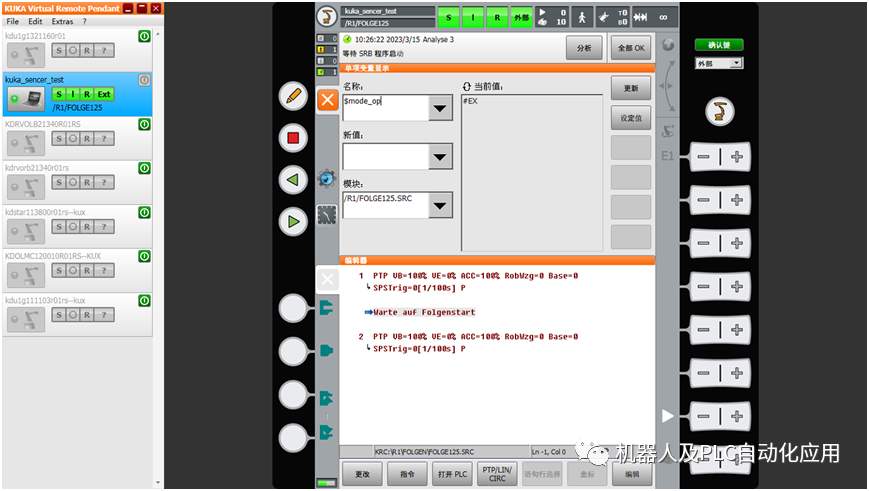
 KUKA运用系统变量$MODE_OP编程
KUKA运用系统变量$MODE_OP编程

WARTE BIS E2200
$LOOP_MSG[]="E2200"
$LOOP_CONT=TRUE
WAIT FOR ($IN[2200]) OR (NOT $LOOP_CONT AND ($MODE_OP<>#EX))
$LOOP_MSG[]=" "
$MODE_OP
当前运行模式
$MODE_OP=Operating mode
| Operating mode |
Type: ENUM #AUT: 自动 #EX: 外部自动 #T1 #T2 |
1例:
WAIT FOR $CYCFLAG[254] OR ( NOT ($LOOP_CONT) AND ($MODE_OP<>#EX))
$LOOP_CONT=TRUE
END
$LOOP_CONT模拟终止等待语句的条件激活
2例:
如果没有达到编程设定的速度,则将输出端 2 设定为 FALSE。
IF (($MODE_OP == #T1) OR ($OV_PRO < 100)) THEN
$OUT[2] = FALSE
ENDIF
…
审核编辑:彭静
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
编程
+关注
关注
90文章
3725浏览量
97528 -
KUKA
+关注
关注
3文章
218浏览量
17534
原文标题:KUKA运用系统变量$MODE_OP编程
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
KUKA库卡机器人伺服驱动器相关型号举例
普通交流马达,属于伺服系统的一部分,主要应用于高精度的定位系统。型号举例:KUKA库卡 00-103-117 Lenze伺服驱动器 (EVS9326-KHV531)KUKA库卡 00-
发表于 09-08 16:30
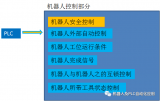
机器人PLC控制要点
$OUT[PF0]=(P0_MERKER OR (DownLoadActive AND ($Mode_OP==#EX))) AND$IN_HOME -$IN_HOME :$OUT[4036]–在FOLGE程序的首部存储当前的轴坐标为初始点VW(#VW_AUE_WAIT,TRUE )
KUKA系统变量:$ERR
ON_ERROR_PROCEED 可用于抑制由以下程序行触发的运行时错误消息。机器人控制器跳过触发错误的语句,并用有关错误的信息填充系统变量 $ERR。
KUKA系统变量$err注意事项说明
该变量可用于评估相对于提前运行的当前执行程序。例如,该变量可用于评估程序中的错误,以便能够使用适当的故障服务功能对其进行响应。
KUKA系统变量$INTERPRETER解释器
通过变量可以读取许多系统状态,并且在许多情况下也可以进行设置。严格来说,这些变量存在多次-每个解释器一次。对于所有解释器,它们的名称相同。
KUKA系统变量:$ERR 程序信息的结构
该变量可用于评估当前执行的程序相对于提前运行。例如,该变量可用于评估程序中的错误,以便能够使用合适的故障服务功能对其进行响应。
从FOLGEN程序中如何实现自动回到CELL程序/开始执行FOLGEN程序
IF($OUT[PF0]AND VW_CALL_CELL AND ( NOT $PRO_MOVE) AND ($MODE_OP==#EX))THEN机器人在原位(A15),执行了CALL程序,机器人没有程序执行,处在外部自动状态

KUKA机器人系统变量$PRO_NAME所选程序的名称(参考解释器)
如果机器人控制器在Multi-Submit模式下操作(仅适用于KUKA系统软件8.3及更高版本),则变量无效。多提交模式下机器人控制器的系统状态分组在
KUKA系统变量:$PROG_INFO
$PROG_INFO[]将某些系统状态组合在一个结构中。 $PROG_INFO[ Interpreter ] = Information Interpreter 类型:INT 1:机器人翻译
KUKA系统变量$err说明
该变量可用于评估相对于提前运行的当前执行程序。例如,该变量可用于评估程序中的错误,以便能够使用适当的故障服务功能对其进行响应。



评论