 KUKA userTech编程及其应用
KUKA userTech编程及其应用

KUKA userTech 编程及其应用
什么是Usertech
KUKA Usertech 是基于KFDL语言,提供给用户的一种基于开发用户定制界面的简单的二次开发平台。
Usertech 可以做哪些事情
开发用户自定义的inline form
开发用户自定义消息
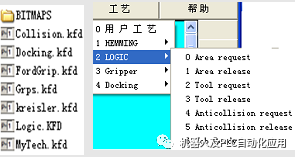
开发用户自定义的软按键、菜单栏
开发特定的操作-响应脚本
用KFD 文件建立用户工艺包
¾ Usertech 是通过外部的KFD 文件进行表述、编辑的。任何文本编辑器都可以用来创建
KFD 文件。KFD 文件的命名遵循KUKA 操作系统自身的命名规则,和其他文件相同,没有特别的规定。
用户创建的KFD 文件应当存放在C:KRCTPUSERTECHTEMPLATE 文件夹里,否则不被识别,不能使用。
通过对用户图形界面(GUI )进行相应菜单的编辑和创建(MenueKeyUser.INI ),实现对应KFD 文件调用。
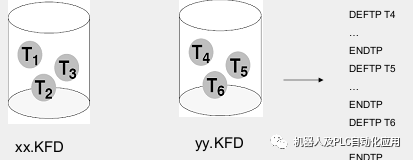
一个KFD 文件里可以定义多个Technology,但是每个Technology的名称只能使用一次。
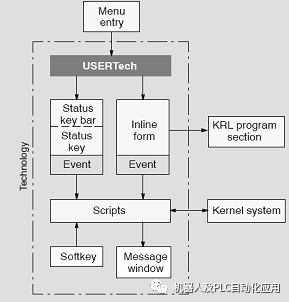
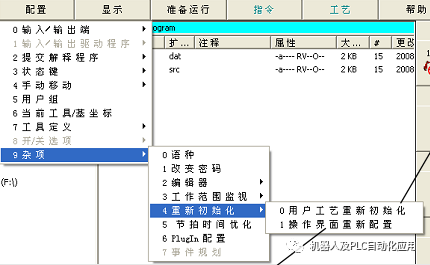
初始化和刷新用户工艺界面
KFDL编程语言中常用的特殊符号有以下几种:
“ ;”: 注释,说明;
“_” : 连接符,主要用于连接不同字符和编程语言上下行,ex: char_ ;
“/ ”: 取消功能符,用于取消程序中具有特定含义的相应功能;ex: /AREA_REQ (1 )取消子程序的调用,/;取消分号的注释作用
“% ”: 位符参数定义,占位符参数后面需要插入"/" 或者" 空格",如果占位符参数后面已用"空格" ,那么后面相关字符,则仍用"空格" 连接;ex: %INLINEFORM/ ;
“# ”:变量值的分配,ex: #%INLINEFORM.
变量类型及关键字
常用变量类型有INT 、REAL、BOOL 、CHAR 。变量的声明要在DEFTP 和ENDTP之间,程序中固有的SWITCH 、CASE等关键字,不能用作它用。
占位符
占位符需要百分号和一个特定的参数名来表示。ex: %INLINEFORM.
usertech 中参数(parameter )的含义
所谓参数是usertech 程序中的基本元素,这些元素构成了Usertech 的各个可操作栏。
如何定义参数: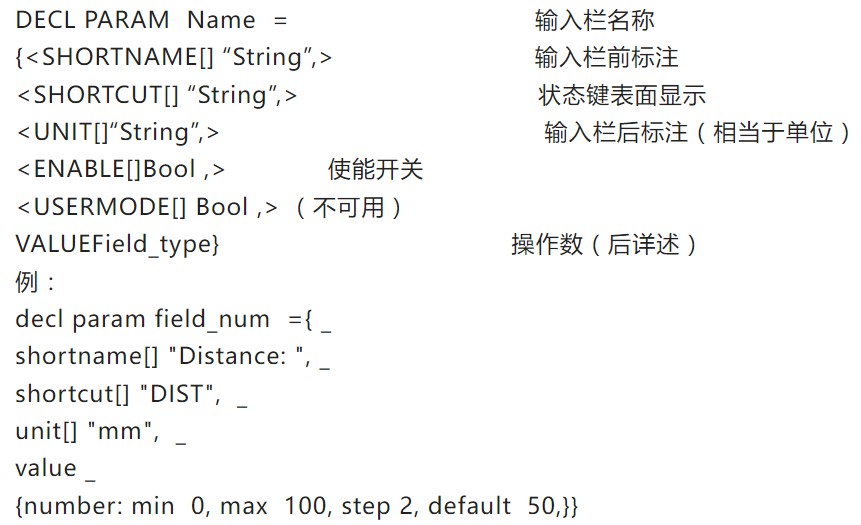
编程结果显示如下:
对应的状态键如下:
操作数(VALUE)
操作数的类型包括:静态、可变、名称、整数、实数、列表。
语法:{STATIC: DEFAULT[] "String"}
语法说明:在程序行显示用户不可编辑的文本。
例: decl param field_sta ={value {stati c: default[] "This can’t be changed"}}
编程结果显示如下:
可变(free )
语法:{FREE: DEFAULT[] "String"}
语法说明:在程序行显示用户可编辑的文本
例: decl param field_fre ={shortname[] "Programmer: ", value _ {free: default[] " Alfred E. Neumann "}}
编程结果如下:
整数(int)
语法:
{NUMBER:
语法说明:在输入栏显示一个整数,用户可通过状态键或者键盘输入来编辑。在上面语法中,MIN、MAX、STEP、DEFAULT均为整型,AUTOLIMIT为布尔型,其中STEP步进缺省值为1,DEFAULT设置输入栏初始显示值,AUTOLIMIT设定的是超限时否自动纠正。
例:decl param field_num ={ shortname[] "D istance: ", shortcut[]_ "DIST", unit[] "mm", value {number: min 0, m ax 100, step 2, default_ 50,}}
编程结果显示如下:
状态键显示如下:
数值0-100 可通过步进2调节在输入栏显示。
名称(name)
语法:{Name: DEFAULT[] "Name"}
语法说明:在输入栏通过状态键导入相应变量名、功能块或者子程序名(名称不能与KRL 中已有的关键字重复)。DEFAULT[ ]:为输入栏显示的变量名、功能块或者子程序名,如果变量名、功能块或者子程序名的最后一个字符为数字,那么可以通过状态键来改变。
例: decl param field_nam ={ shor tname[] “Welding-point-nr.: ”,_ shortcut[] _ "WPT", value {name: default[] "WPT1"}}
编程结果显示如下:
相应的状态键如下:
实数(real )
语法:{NUMBER:
语法说明:在输入栏显示一个实数,用户可通过状态键和数字键盘来编辑。
在上面语法中,MIN、MAX、STEP、DEFAULT均为实数型,AUTOLIMIT为布尔型,其中STEP步进缺省值为0.1,DEFAULT设置输入栏初始显示值,AUTOLIMIT设置输出值的最大最小范围。
例:decl param field_rea ={shortname[] “Delay: ”, shortcut[]_“DELAY”,_ unit[] “secs”, value {real: min 0.5, max 5,step 0.5,_default 2}}
编程结果显示如下:
相应状态键如下:
审核编辑:刘清
-
GUI
+关注
关注
3文章
699浏览量
44069 -
KUKA机器人
+关注
关注
4文章
144浏览量
10131
原文标题:KUKA C2 userTech 编程及其应用(浅谈)
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
KUKA库卡机器人伺服驱动器相关型号举例
KUKA机器人伺服驱动模块维修
没有有前辈用LabVIEW控制kuka机器人c2的经验?通讯是怎么做到的?
库卡机器人基础教程和库卡C4编程指南及焊接机器人教程合集免费下载





评论