 机器人PLC控制要点
机器人PLC控制要点


机器人安全控制程序


机器人安全控制程序-机器人急停反馈控制

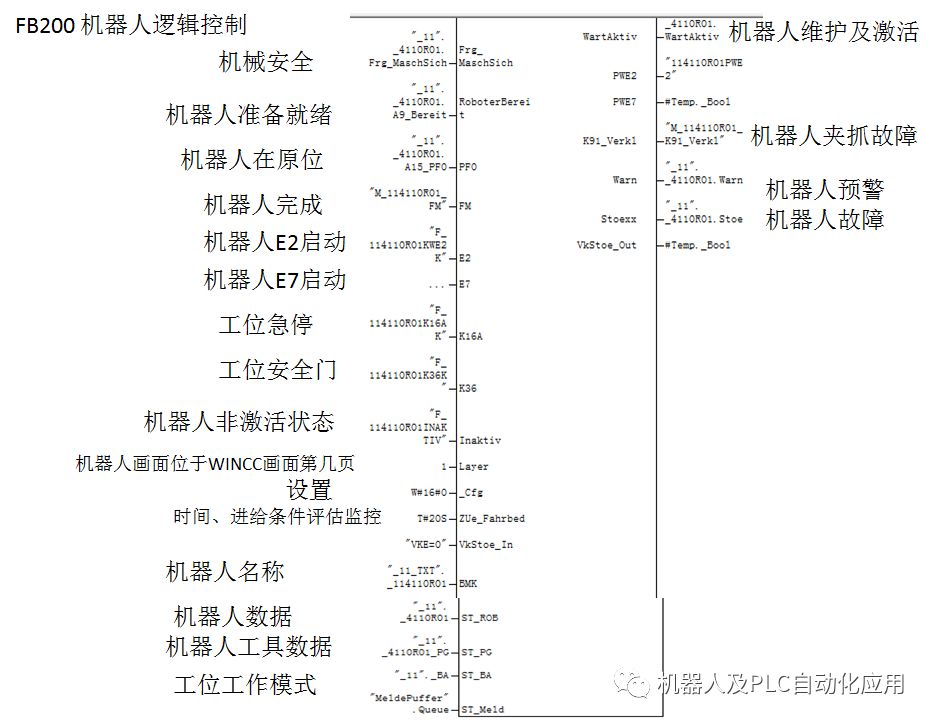
FB200 机器人逻辑控制

1.KRC-PLC BEREIT ----------1- O_R_Bereit=9 A9机器人准备就绪$RC_RDY1 $OUT[9]
2.KRC-PLC RK9 ----------1- O_R_Auto=12$I_O_ACTCONF$OUT[12]机器人自动模式
3.KRC-PLC RK100 ----------1-O_R_RK100=10 A10机器人控制系统启动RK100=10 $OUT[RK100]=MERK1 ,MERK1=$ALARM_STOP AND $USER_SAF$ALARM_STOP:报警停止,$USER_SAF:安全门监视用户安全 $USER_SAF $OUT[4059]机器人安全信息满足。
4.KRC-PLC PF0----------1 -$OUT[PF0]=(P0_MERKER OR (DownLoadActive AND ($Mode_OP==#EX))) AND$IN_HOME -$IN_HOME :$OUT[4036]–在FOLGE程序的首部存储当前的轴坐标为初始点VW(#VW_AUE_WAIT,TRUE )
5.PLC-KRC ANTEIN----------2-I_R_Ant_Ein=10驱动接通 E10
6.KRC-PLC SAK ----------3-O_R_SAK=16在轨迹上$NEAR_POSRET:$OUT[16]
7.PLC-KRC FLGNO----------4 -PRG_NR $IN[1] TO $IN[8]程序号给入
8.KRC-PLC FLGNO----------5-PRG_NR_REFL$OUT[1] TO $OUT[8]程序号返回
9.PLC-KRC SRB----------6-程序启动I_R_SRB=9 -E9
10.KRC-PLC PF0----------7 -机器人不在原位
11.KRC-PLC LPTK ----------8–程序到达最后一点LPKT=14-在FOLGE程序中最后执行VW (#VW_AUE_END,TRUE)发出程序在最后1点,等待一段时间后再关闭。
12.PLC-KRC FLGNO ----------9-PRG_NR关闭
13.KRC-PLC FLGNO ----------10- PRG_NR_REFL关闭
14.KRC-PLC LPTK----------11- 机器人最后一点关闭
15.KRC-PLC PF0----------12- 机器人在原位


FB205机器人完成信号
如果是非标的PLC和机器人项目可自行规定机器人完成信号区域

机器人之间的连锁信号之间的控制:需要认为设定一个IO区域用来控制机器人之间互锁区域.

当1号 进入干涉区 会关闭与2号机器人的安全信号,而2 号机器人在进入安全区时会等待这个安全信号,等1 号 机器人离开后发出允许信号后再进入。



工位运行顺序控制,需要设定一定的区域范围。

机器人给PLC反馈的工具控制状态
-
控制系统
+关注
关注
41文章
7001浏览量
114577 -
机器人
+关注
关注
214文章
31650浏览量
224562 -
plc
+关注
关注
5052文章
14939浏览量
489420
原文标题:机器人PLC控制要点
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
基于米尔RK3576核心板的国产割草机器人解决方案
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
Neway电机方案在机器人技术方面的优势
从PLC到机器人:实时操作系统如何决定能力上限
人形机器人爆发背后,一个被忽视的核心技术:机器人运动学控制

再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
高精度机器人控制的核心——基于 MYD-LT536 开发板的精密运动控制方案
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
小萝卜机器人的故事
机器人竞技幕后:磁传感器芯片激活 “精准感知力”

工业机器人的特点
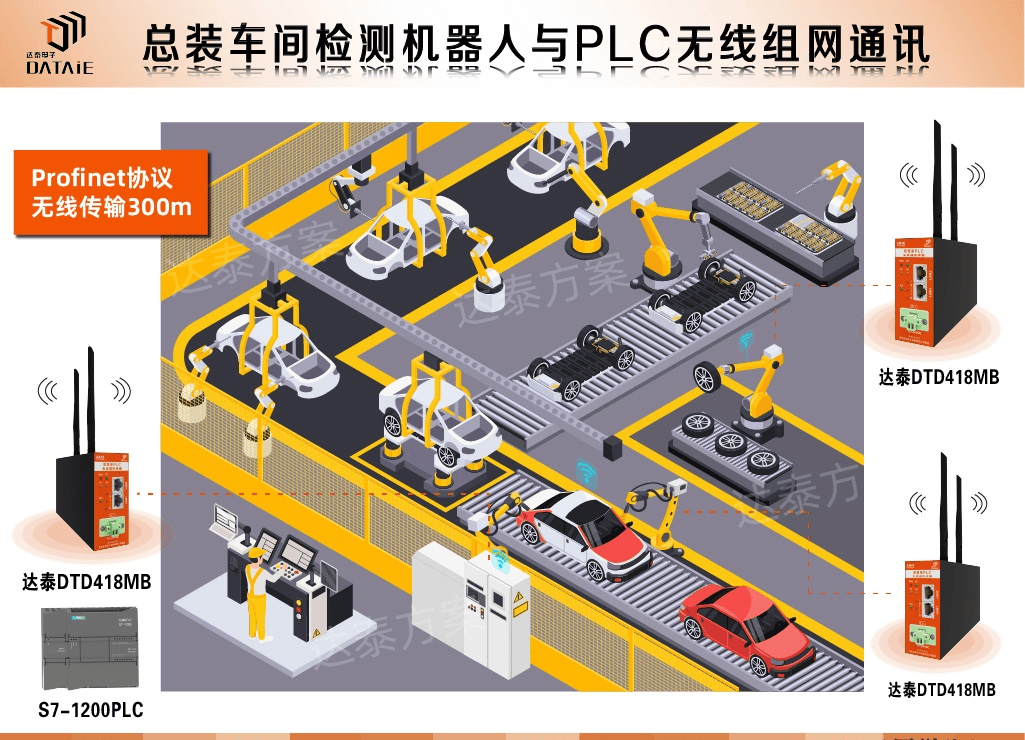
汽车制造车间检测机器人与PLC无线以太网实时控制方案
跨协议探秘:profinet转ethernet ip网关搞定川崎机器人与PLC通信




评论